 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库eVTOL电驱动系统的安全架构选择
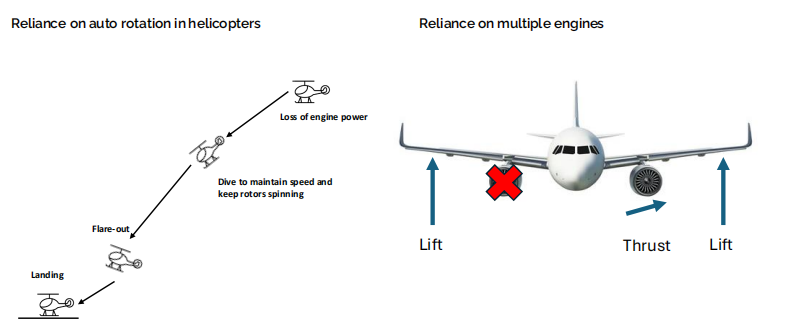
在许多eVTOL设计中,推进系统是飞行控制的关键。
四分之一的推进器损失可能会是灾难性的,rotor故障导致的非对称升力=无法控制的偏航,与传统飞机不同,推进系统的工作状态对eVTOL的飞行控制至关重要。因此,需要开发安全水平达到DAL A的系统水平。
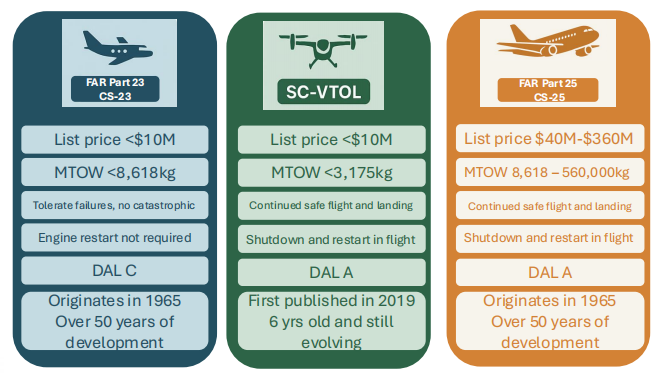
而由增强型飞越人口稠密地区的能力驱动SC-VTOL对推进系统的要求很高。
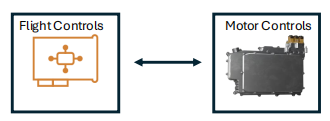
电动机控制类似于全电数字发动机控制系统,但会影响eVTOL飞行的稳定性。FADEC控制电动机,飞行控制在飞行的所有阶段保持稳定和控制。飞行控制系统设计有多个备用系统,以确保在发生故障时继续运行。在这里需要将两者结合起来——它们不能解耦,因此需要更多的冗余。关于不同eVTOL设计的解决方案没有共同的方法,监管机构将强制实施最佳实践。
冗余带来的第一个问题就是电机的健康监测,今天的电机监控功能足以用于eVTOL吗?电机监控也在为飞行控制工作, 而电机控制也需要飞行控制的不同策略配置。如果电机控制和飞行控制存在CON/MON分歧,则需要在航空电子设备(飞行控制)的上游进行处理。
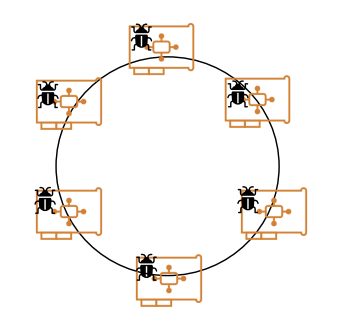
如何为严重的共模故障(CMF)做好准备?
由于共同原因,两个或多个系统或组件同时发生故障,例如:
电源问题
环境压力(如闪电、电磁干扰)
软件bug
制造缺陷
其中还包括激进的共模故障,在以下情况下,具有特别破坏性或快速作用的CMF:
失败不是渐进的,而是突然的、灾难性的
它可能会绕过保护或压倒冗余
它可能会造成广泛的系统损坏或安全隐患
新飞机、任务和设备上存在概率安全的问题,电动机在测试中非常可靠,但是仍存在一些现实问题。
•现实世界的飞行时间仍然有限,证明电子产品的性能始终是一个挑战
•在实际和财务方面,从经验中已经知道,复杂的系统可能不太可靠
•而现有的安全解决方案正是来自硬件冗余
通过系统级别差异或重复实现安全是对重量、复杂性和成本的挑战。
重量负担>50%
航程或最大起飞重量受损
尽管容错性或可用性有所提高,但复杂性的增加会增加故障概率
因此,关于eVTOL的电机驱动系统是通过更复杂的冗余系统来解决,还是通过尽量提高单个单机驱动系统的性能来解决,然而将冗余和性能嵌入到系统中是基本的前提。

VTOL圈会员,2025年年度总结
VTOL圈会员,2026年服务规划
VTOL圈个人会员生态(2025年8月)
VTOL圈动态,入圈资料包更新(2025年9月)





