 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库Nature | 60万器件实现单片集成:全球首款纯固态相干激光雷达


在自动驾驶与机器人感知中,传统的被动成像将机器视野限制在扁平的二维图像中。如何让它们真正“看见”空间中的移动目标?激光雷达(LiDAR)赋能的主动式四维(4D)成像,正让汽车与机器人超越人类视觉,在强光或黑夜中瞬间看清三维环境与移动目标。产业界一直在试图将具备4D成像功能但庞大昂贵的激光雷达彻底“芯片化”,为汽车和机器人打造一双微型、廉价、可量产的“4D慧眼”。
调频连续波(FMCW)体制的相干激光雷达无惧杂散光干扰,还能直接测出目标速度,被认为是实现真4D感知的理想方案。然而,这种复杂的干涉系统真的能单片集成并大规模量产吗?在拥挤的大规模焦平面像素阵列中,如何导光,如何防光电串扰?另外,在缺乏集成环形器的硅光工艺中,是向芯片面积妥协、采用安全的“双站”收发分离架构,还是直面反射光烧毁风险、挑战极高难度的“单站”自发自收?
近日,来自瑞士Pointcloud GmbH公司的研究团队成功破解了上述多重技术难题。研究团队依托45 nm硅光集成工艺,研发出超60万个光子器件大规模集成的纯固态FMCW激光雷达焦平面阵列(FPA)芯片,在创纪录的逾6万像素成像规模下实现单点探测功耗仅46 nJ的商业级真4D点云成像。这标志着激光雷达领域正式迎来FMCW方案的“硅光时刻”。这项成果以“A large-scale coherent 4D imaging sensor”为题发表于Nature,被Nature应用与物理科学主编评论为“令人印象深刻的光电工程领域成就”。低功耗、低成本、微型化的真4D成像传感器,正加速走向自动驾驶、机器人和消费电子市场。
硅光平台中难以实现紧凑的集成光环形器,传统硅光激光雷达多基于收发分离的双站架构。这不仅带来了成倍的芯片面积开销,更造成了严峻的收发光路对准问题和距离依赖盲区,此外相邻像素间的光串扰也严重制约了阵列尺寸扩展。
为此,研究团队大胆地在每个像素内集成了两组光栅耦合器,利用同一组光栅处理发射和回波光脉冲,从物理源头彻底杜绝了光束对准需求。同时,团队在单像素面积内高度集成平衡探测器、跨阻放大器和定向耦合器,实现了有效抑制共模噪声的平衡相干探测。
这种收发一体的单像素单站架构,使得团队成功集成超60万个光子器件,构建了352×176像素的片上FPA阵列,规模达到此前最先进水平的五倍!
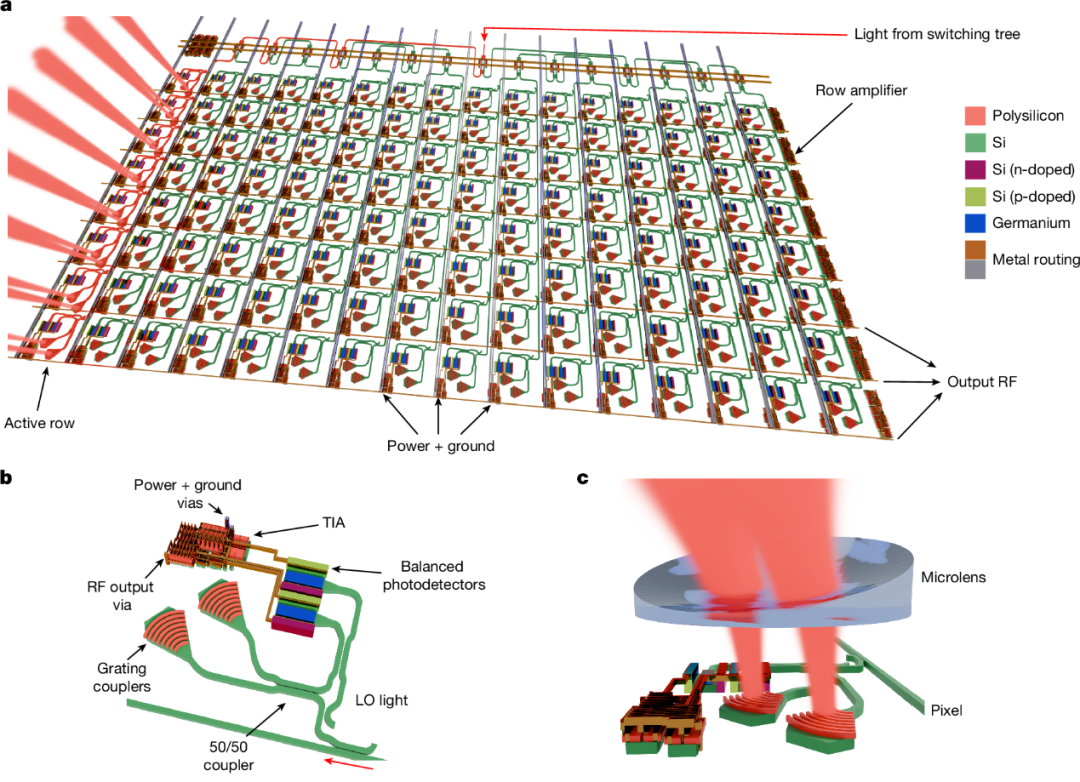
片上集成架构示意:(a)单像素块结构总览;(b)单像素中的单站光路;(c)沉积微透镜结构改善单像素出光收光。(来源:https://www.nature.com/articles/s41586-026-10183-6/figures/2)
当像素阵列从1万单元跃升至6万单元规模,若采用传统并行波导布线,不仅将引发严重光传输损耗,还会造成芯片面积不得不被波导“撑大”。如何实现高效低损耗的片上光寻址,成为了超大规模FPA走向实用的核心工程瓶颈。
研究团队设计了两级级联的热光开关树结构:第一级开关网络置于阵列外部,负责将光束宏观导引至512个像素区块;第二级网络则嵌入区块内部,精准导向具体的像素行列。配合每一级开关末端集成的监测光电二极管,实现了自动相位偏移校准。
凭借这种“立交桥”般的片上光寻址方案,团队通过16个光纤输入通道,将总开关网络插入损耗控制在了4 dB水平。系统不仅实现了高效光寻址,还支持多通道并行工作,单次可同时点亮128个像素。
FPA架构本可使能类似“图像传感器+可更换镜头”的灵活设计;但由于硅光光栅面外发射角固定,芯片出光具有发散角极小和方向倾斜的特点。若直接使用复杂的定制外部组件匹配商用镜头,往往会出现孔径填充不完全,引发像差和边缘暗角,这严重限制了系统视场角与探测距离,更丢失了灵活重配和拓展的可能。
为解决这一问题,团队在芯片后段制造工艺中,在单片表面为每一像素定制沉积了凹面微透镜。这不仅校正了面外发射角,更将光束完美扩束,从而充分匹配了外部成像镜头的孔径。实验证明,只需更换不同焦距镜头,系统的视场角就能完全按需切换,实现对激光雷达的探测平面加镜头的可拓展和可变成像设计。
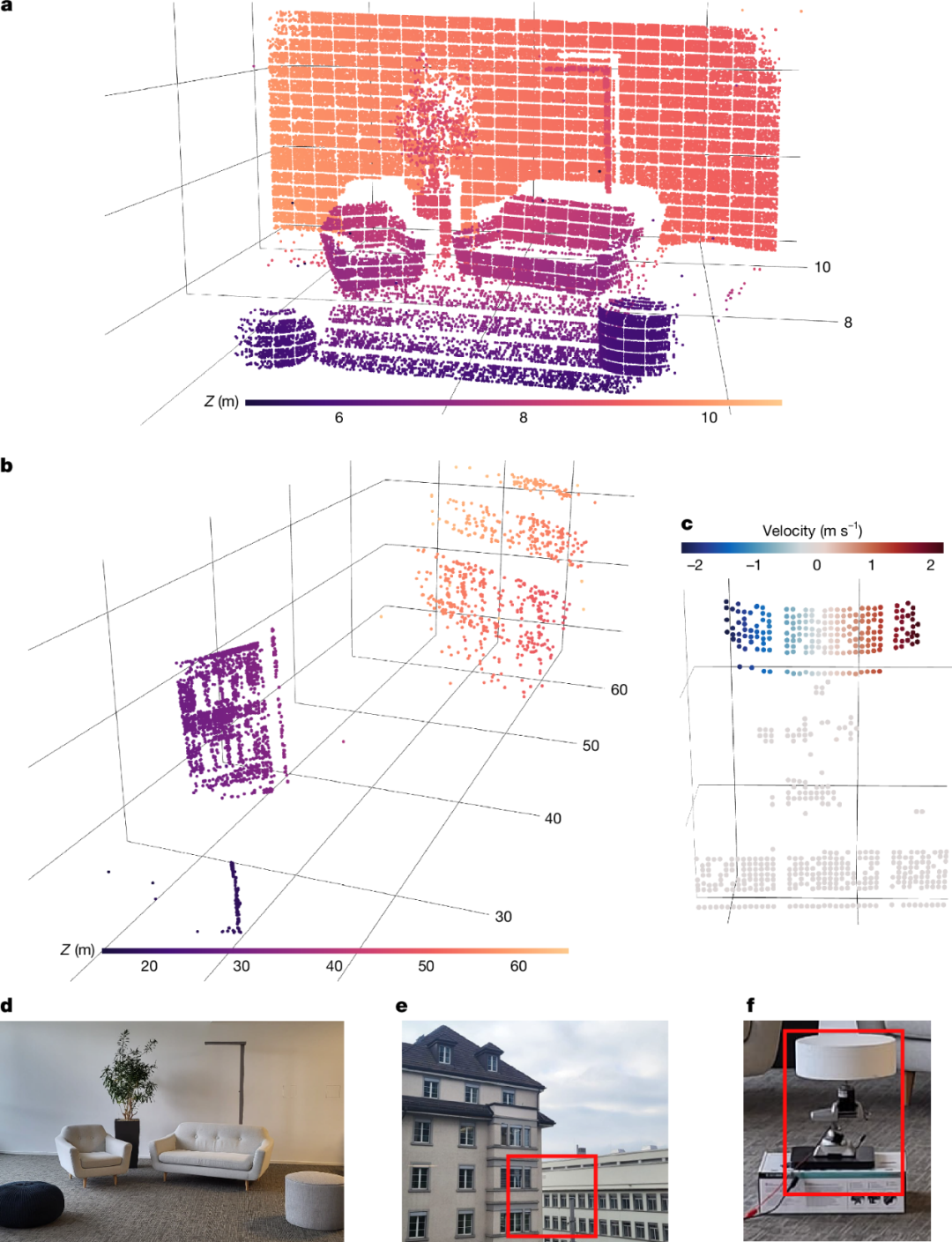
示例点云与实景图:(a)单次采集的办公室场景点云;(b)多次相干平均的远距离建筑点云;(c)附带速度标注的旋转圆盘点云;(d-f)对应的场景照片。(来源:https://www.nature.com/articles/s41586-026-10183-6/figures/3)
传统飞行时间激光雷达在远距离探测时需要微焦(uJ)级别的脉冲能量,在实现高分辨率扫描要求下,激光功率逼近人眼安全标准极限。降低单点探测能耗,成为了功率控制与分辨率权衡的核心。
研究团队采用调频连续波单像素相干混频体制,依托45 nm单片集成工艺,将探测器和放大器直接塞入像素,使信号在无干扰下直接放大,极大抑制了底噪。同时,单站自发自收的光路设计带来了高度的选择性,将自然光、环境光源等进行自然滤除,彻底消除了用高功率脉冲抑制干扰光的需求。
结合4次极低功率(单次11 nJ)的相干平均探测,团队将单点探测能耗拉低至46 nJ,比此前工作降低了整整十倍!在15 fps实时帧率下,系统实现了65 m探测距离;此外在25 mm距离分辨率的物理限制下,基于脉冲峰值频率插值实现了3.9 mm的距离精度和3.0 mm/s的速度精度,全面达到商业级应用标准。
基于硅基光电子学与微纳光学设计的融合创新,这项工作解决了多项关键技术难题,让真4D视觉传感器从技术愿景走向现实应用。凭借微型化、低成本、高性能、可量产、可拓展等优势,FPA激光雷达芯片正式迎来“硅光时刻”,助力自动驾驶和机器人行业开启“视力”升级!
作者在同期Nature Research Briefing 报道中预测,未来通过引入多层芯片架构以及低非线性材料,系统将有效攻克硅波导横截面受限导致的片上光功率限制,使得探测距离直接跃升至200 m以上。随着片上光源和放大器的进一步集成,兼具更优分辨率和能效的单芯片4D成像即将到来。届时,单芯片4D成像系统将拥有比肩传统相机的集成度,推动传统成像技术迈向真4D时代。
从芯片级微透镜的光场精准调控,到复杂环境下的4D点云相干计算成像,微纳光学与计算成像的交叉融合正在催生下一代视觉革命。
为集中展示相关领域的最新研究进展,推动学术交流和技术创新,《激光与光电子学进展》将于2026年9月(第63卷第18期)推出“微纳计算成像”专题,现公开征集相关领域的研究论文和综述,诚挚邀请国内外专家投稿,共同助力微纳计算成像技术的深入发展。征稿类型:研究论文或综述。

征稿方向(包括但不限于):
1、微纳光学元件计算成像
2、超表面多维成像技术(偏振成像、光谱成像、3D成像及其融合等)
3、微纳超分辨成像
4、人工智能赋能超表面设计
5、超表面器件新型应用
6、微纳全光图像处理
科学编辑 | 戴炜杰
编辑 | 徐睿

END

点在看联系更紧密





