 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库Nature Sensors | AI驱动光声成像系统协同优化设计
 Banner
Banner本文由论文作者团队投稿
导读
光声成像是一种融合光学高对比度与超声大深穿透能力的生物医学成像技术。该技术通过探测组织吸收纳秒脉冲光后产生的超声信号,可在厘米级组织深度下无创、无标记地获取血管网络、血氧变化和分子功能信息,在生命科学研究、疾病诊断和功能成像等方向具有重要应用潜力。
然而,高质量光声成像通常依赖高性能激光器和密集超声换能器阵列,导致系统体积大、成本高、结构复杂,难以满足便携化和低成本应用需求。已有研究尝试通过采用低成本光源、稀疏探测阵列、压缩感知或深度学习算法来缓解这一问题,但多数方法仍沿用硬件结构和重建算法串行开发流程,较大程度依赖人工经验和反复调试,难以充分实现软硬件协同最优设计。
近日,苏黎世联邦理工学院和苏黎世大学Daniel Razansky教授、北京理工大学边丽蘅教授和同济大学陈振跃教授团队合作,提出了一种基于可微分物理孪生模型的光声成像协同优化设计方法。该方法将换能器阵列显式建模为可学习参数,能够在训练过程中同时优化阵元排布和稀疏信号重建。基于这一方法,研究团队设计了超稀疏环形和半球形换能器阵列,在仅使用传统阵元数量 0.8%–12.5% 的情况下,仍保持高质量的结构和功能成像能力。进一步地,团队构建了一套手持式光声体成像系统,实现 2 kHz 的高速体成像。该研究为人工智能驱动的小型化、低成本、高性能生物医学成像仪器设计提供了新的思路。
相关成果以“Deep learning codesign for ultrasparse, high-performance optoacoustic imaging”为题发表在 Nature Sensors。Daniel Razansky教授、边丽蘅教授和陈振跃教授为论文的共同通讯作者。北京理工大学博士生常旭阳与苏黎世联邦理工学院刘翔博士为共同第一作者。
一、设计思路:换能器阵列布局与重建算法的协同优化
传统光声系统设计通常采用串行流程。研究人员先根据经验、几何对称性或工程约束确定换能器参数和阵元排布,再针对固定硬件结构开发图像重建算法。当成像质量无法满足需求时,往往需要在硬件设计和算法调参之间反复迭代,难以充分挖掘硬件采样与后端重建之间的最优匹配关系。
本研究提出的协同优化设计方法改变了这一思路。研究团队构建了一个完全可微分的数字模型,包括描述光声信号产生、传播和采样过程的可微分前向模型,以及负责从稀疏信号恢复高质量图像的重建模块。在训练过程中,每个阵元的空间坐标被显式表示为可学习参数。系统通过前向模型模拟不同排布下的稀疏光声信号,再通过物理启发的反投影步骤和神经网络完成图像重建,最终根据重建误差同时更新阵元坐标和神经网络参数。由此,硬件采样和深度学习重建在同一目标函数下协同收敛,将光声成像仪器设计从传统模块化组合推进到面向成像任务的系统级优化。
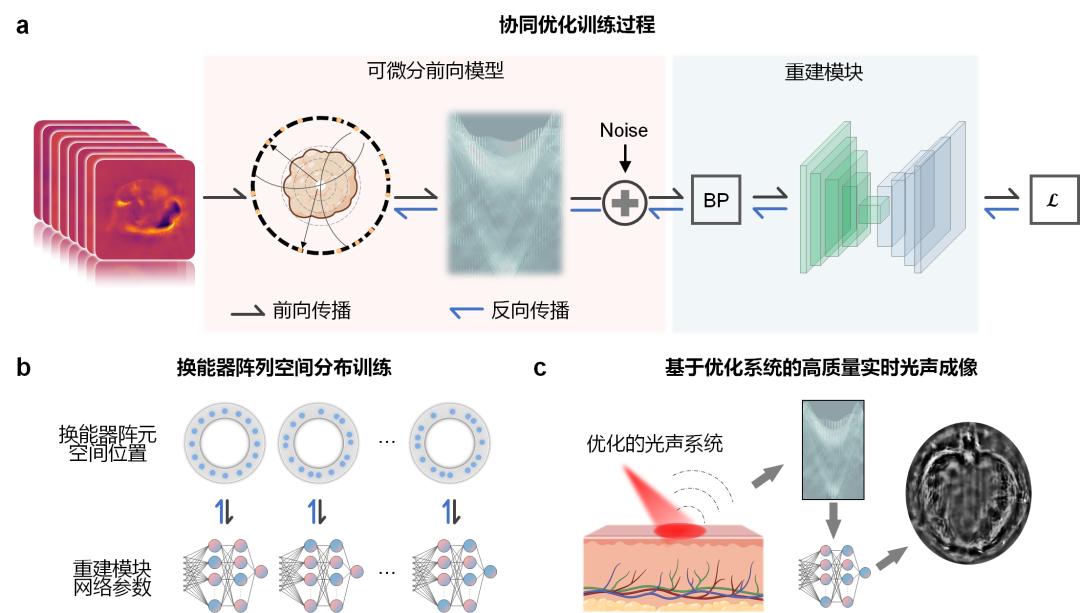
图1:光声成像协同优化设计方法
图源:Nature Sensors
二、环形阵列设计:超稀疏二维层析成像
研究团队首先在 4 – 32 个阵元的二维环形阵列中验证该方法。团队基于小鼠腹部区域的全采样光声层析数据构建训练数据集,使数字模型能够在真实生物组织结构分布上学习有效的稀疏采样策略。阵元分布优化结果显示,在不同稀疏程度下,系统会形成具有任务适应性的布局。在极端稀疏下倾向于在基本角度覆盖和伪影抑制之间取得平衡;随着阵元数量增加,进一步引入分布不对称性,以捕获更丰富的空间频率信息。
在图像重建方面,研究团队系统比较了启发式布局、压缩感知优化布局、强化学习优化布局及不同重建算法的组合。结果表明,在不同阵元数量约束下,传统组合难以稳定获得最优性能。相比之下,协同优化方法通过端到端训练同时确定阵元布局和重建模型,在超稀疏采样下实现了更高保真的结构重建。即使仅使用 4 个探测器,约为先进系统探测密度的 0.8%,该方法仍能够恢复具有解剖可辨识度的组织结构。
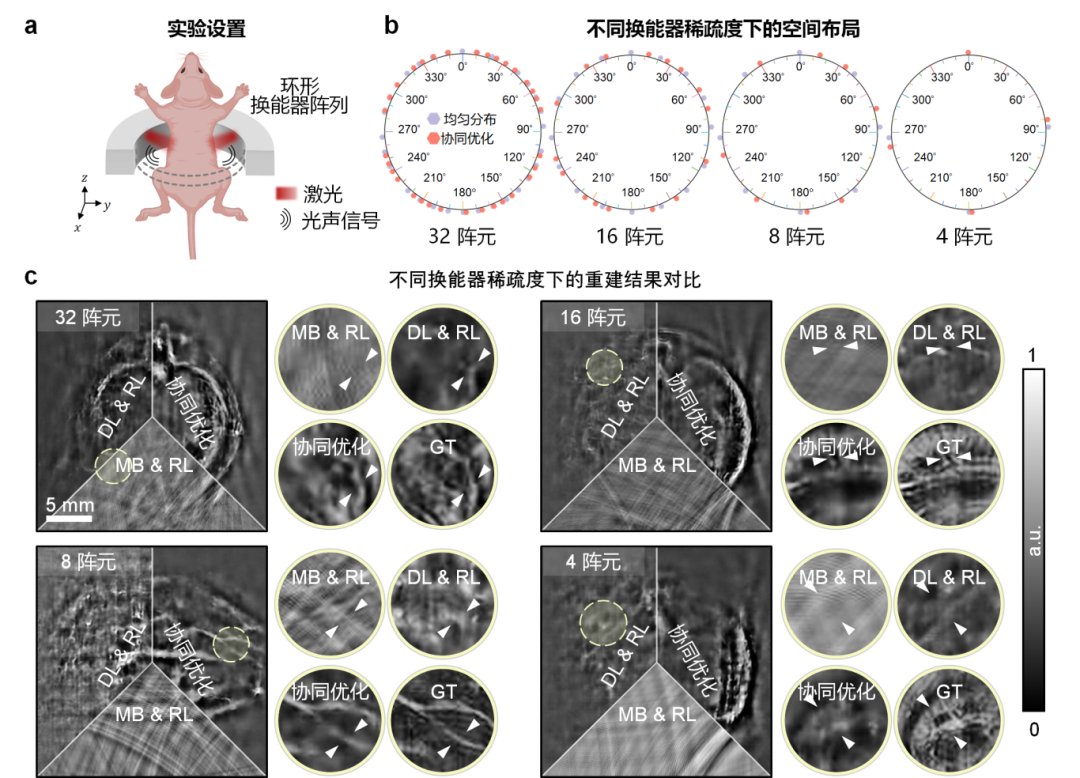
图2:基于超稀疏环形阵列的二维层析成像
图源:Nature Sensors
三、半球形阵列设计:三维脑血管网络功能成像
在二维验证基础上,研究团队进一步将该方法拓展至三维半球形阵列。半球形阵列能够直接实现体成像,在时间分辨率和功能成像方面具有优势,但也对探测阵元数量、数据吞吐和重建稳定性提出了更高要求。为提高训练效率,研究团队在三维场景中引入基于可微分拉东变换的前向模型,在保证优化有效性的同时降低计算和显存负担。
在三维静态结构成像之外,研究团队进一步将该方法用于对时间分辨率和定量一致性要求更高的活体脑功能成像。团队利用 64 个优化阵元观测小鼠后肢电刺激引发的脑血液动力学响应。实验结果显示,该方法能够恢复氧合血红蛋白、脱氧血红蛋白、总血红蛋白以及血氧饱和度等功能参数的时间变化趋势,并与 512 通道全采样结果保持良好一致。
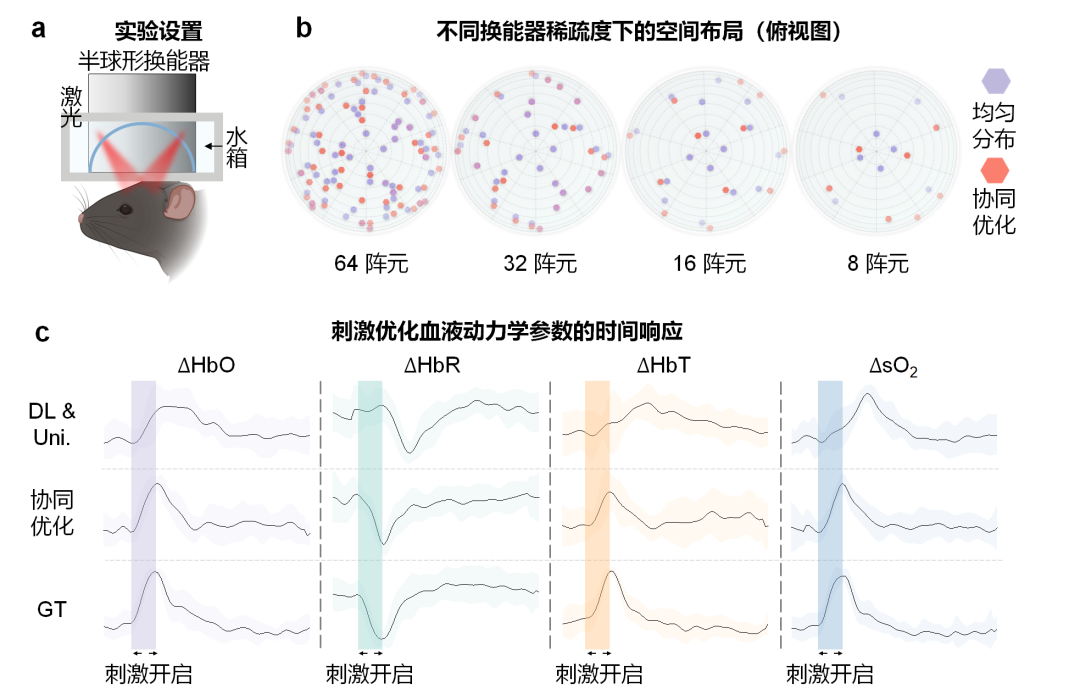
图3:基于超稀疏半球形阵列的三维体功能成像
图源:Nature Sensors
四、手持式设备开发:从协同优化设计走向真实系统
为进一步验证该方法的临床转化潜力,研究团队基于协同优化结果构建了一套低成本手持式体光声成像设备。该系统采用915 nm 激光二极管作为光源,并将其环形排布在探头中,形成约 15 mm 直径的汇聚照明,单脉冲总能量约为 1.8 mJ。与传统大型光声系统相比,激光二极管方案在成本、体积和集成度方面具有明显优势。在信号采集端,研究团队采用协同优化的 32 通道半球形阵列。通过将光激发和声探测集成在统一的手持探头中,最终构建了直径约 83 mm、高约 140 mm、重量约 840 g 的手持式光声成像样机。
在健康志愿者手指成像实验中,该样机成功获得了手指血管网络的三维结构。尽管系统仅使用少量阵元和低成本激光二极管,其轴向分辨率仍达到约 157 μm,成像效果接近使用全采样通道和高性能固体激光器获得的参考结果。
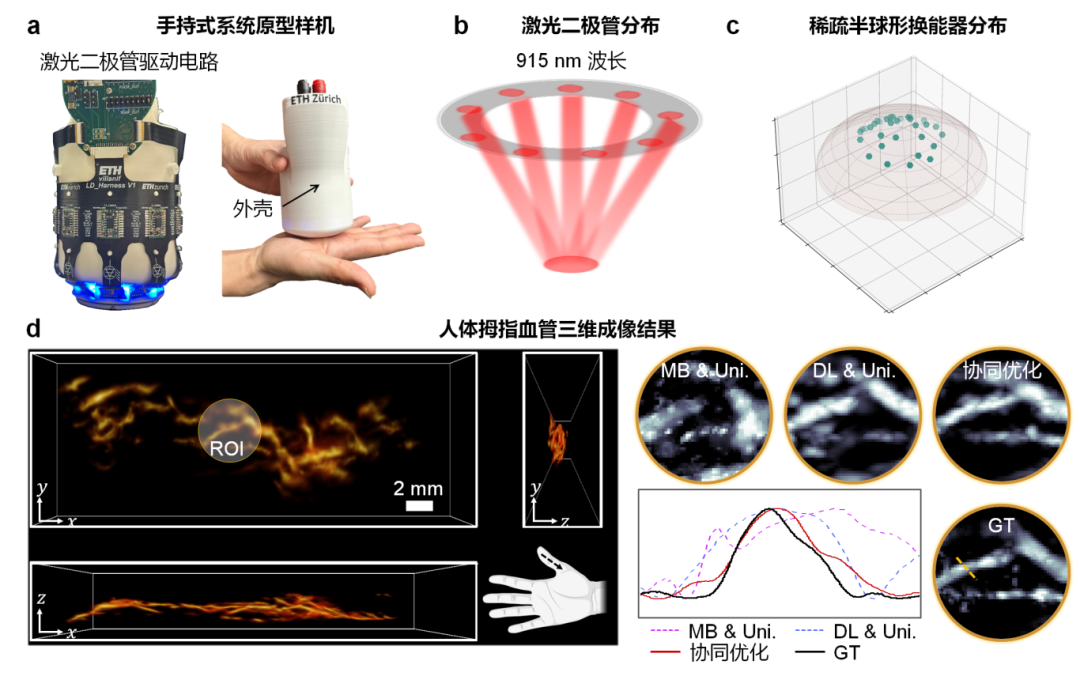
图4:手持式体光声成像样机与人体手指成像结果
图源:Nature Sensors
五、2 kHz 高速体成像:面向动态过程的实时观测
高速体成像是实时诊断的关键需求。传统体光声系统常受限于激光重复频率、阵元数量和数据通量,成像帧率难以进一步提升。依托上述手持式光声成像样机,研究团队实现了 2 kHz 的高速体成像,并分别在运动微球和快速移动手指实验中进行了验证。与 100 Hz 成像相比,2 kHz 成像能够以更高时间分辨率捕捉目标运动轨迹,提升了对快速动态过程的观测能力。得益于重建模块较低的计算复杂度,团队进一步开发了实时预览图形界面,实现了光声信号的即时采集、重建与可视化反馈,为术中导航等需要实时反馈的应用场景提供了技术基础。
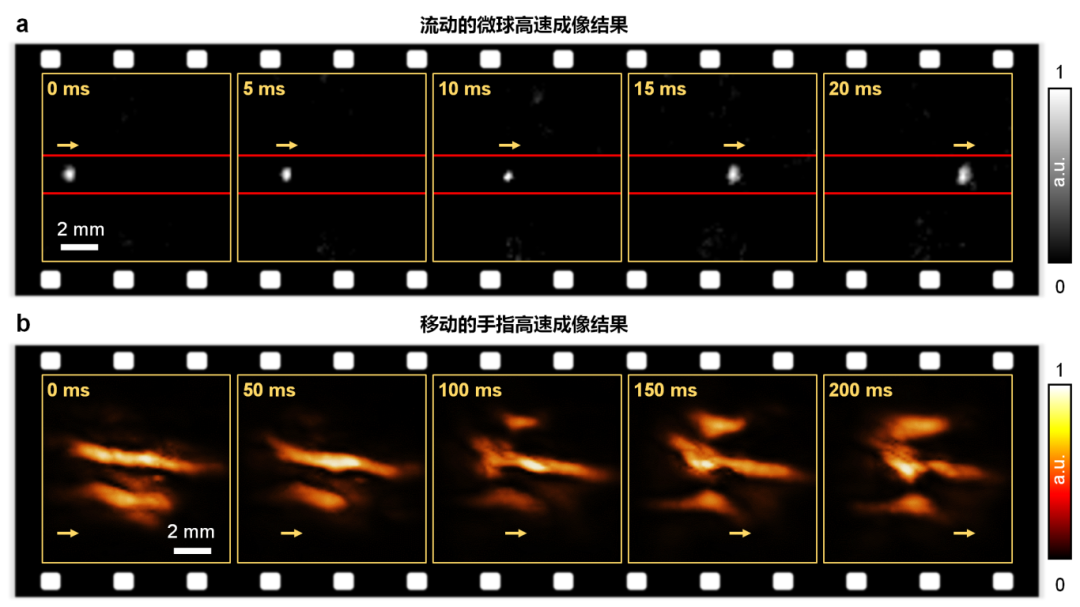
图5:2 kHz 超快光声成像结果
图源:Nature Sensors
意义与展望
该研究提出了一种面向光声成像的系统级协同优化设计思路。当物理过程能够被可微分模型描述,硬件参数和图像重建过程能够被数学化表示时,成像系统本身可以被视为一个可训练、可优化的整体。与传统依赖经验和模块化调试的设计方式相比,该方法将硬件布局和重建算法纳入统一优化目标,为复杂成像系统设计提供了更高效的路径。
未来,该方法还可进一步扩展到激发波长、脉冲宽度、换能器频率等更多硬件参数的联合优化,并有望推广至光声显微、柔性超声传感器设计以及其他计算成像系统。随着更高保真度物理模型、实时反馈机制和数据同化方法的发展,这类可微分方法还有望进一步演化为面向生物医学成像仪器的数字孪生平台。
论文信息
Chang, X., Liu, X., Villani, F. et al. Deep learning codesign for ultrasparse, high‑performance optoacoustic imaging. Nat. Sens. (2026).
https://doi.org/10.1038/s44460-026-00071-x

编辑:赵阳
欢迎课题组投宣传稿
请扫码联系值班编辑






