 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库Optica | 光场编码力觉:在 1.7 mm 尺度实现六维感知
 Banner
Banner本文由论文作者团队投稿

引子
人类对物理世界的理解,很大程度上建立在感知能力的不断拓展之上。从显微镜和望远镜延伸人类视觉边界,到现代成像、传感与智能算法不断提升机器对环境的认知能力,“感知”始终是推动科学发现和技术进步的重要基础。然而,相较于已经广泛应用的机器视觉,机器人对“接触”的感知能力仍然十分有限。尤其是在微创医疗、柔性制造和微尺度操作等场景中,机器人虽然能够获得清晰图像,却往往难以同步感知接触过程中的力、剪切与扭转等物理交互信息。这种高维物理感知能力的缺失,已成为制约下一代智能机器人安全交互与精准操作的关键瓶颈之一。
长期以来,六维力觉感知被认为是实现高精度机器人交互的重要基础。然而,传统六维力传感器通常依赖应变片、电容阵列或光纤布拉格光栅等复杂结构,不仅体积较大、制造复杂,而且难以进一步微型化,难以满足导管、腔镜以及眼科手术等毫米级受限空间中的应用需求。特别是在微创医学场景中,如何在极小尺度下实现力与力矩的同步感知,一直是国际上极具挑战性的研究方向。
针对这一难题,上海交通大学生物医学工程学院杨建龙课题组提出了一种“光场编码力觉”的全新感知范式,研制出外径仅 1.7 mm 的全光学六维力传感器。该器件利用柔性弹性结构将外界接触引起的微小形变转化为内部光场分布变化,并通过相干光纤束将空间光强图案传输至近端成像系统,从而实现对三维力和三维力矩的同步解码。与传统依赖多通道电子元件或复杂光栅结构的方案不同,该方法将整体接触状态编码进单一光学通道,为微型工具和机器人提供了一种兼具小型化、低复杂度和高维感知能力的新路径。
进一步地,研究团队引入基于生成式扩散模型的自校准框架,用于解决六维力学空间标定数据获取困难、力学—光学响应耦合复杂等问题。实验结果表明,该系统能够实现稳定、可重复的六维力觉测量,并在温度变化、光纤弯曲等条件下保持良好鲁棒性。研究人员还通过模拟肿瘤触诊实验验证了该传感器对隐藏硬质结构的感知与定位能力,展示了其在微创机器人、柔性器械和生物医学操作中的应用潜力。
相关成果以《Deformation-encoded light-field transduction enables 6-DoF optical force sensing in a 1.7 mm footprint》为题发表于《Optica》。上海交通大学博士生张伟逸为论文第一作者,杨建龙副教授为通讯作者。该工作同时被 Optica Publishing Group 选为官方 News Release,并以 “Tiny sensor harnesses light to feel touch” 为题进行专题报道。(optica.org)
一、光场编码力觉:1.7 mm 尺度下的六维感知
团队提出了一种“光场编码力觉”的全新感知范式,首次在仅 1.7 mm 尺度下实现全光学六维力与力矩感知。整个系统由柔性弹性穹顶、弹簧支撑结构以及相干光纤束共同组成,并整体集成于微型探针中。
在接触过程中,外界力与力矩会驱动柔性结构发生耦合形变,并进一步改变内部空腔的几何形貌与光场传播路径。由于不同方向的力学加载对应不同的空间形变模式,因此会产生具有区分性的光场调制特征。例如,轴向压力主要引起整体光场的径向扩张,而横向力与弯曲力矩则会形成方向性的非对称光强梯度;扭转载荷还会进一步诱导螺旋状光场调制模式。随后,这些携带力学信息的空间光强图案通过相干光纤束传输至近端 CMOS 成像系统,实现六维力学状态的远距离光学读出。
与传统依赖多通道电子器件或复杂光栅解调结构的方案不同,该方法首次将整体接触状态编码进单一光学通道,使“接触”本身转化为可解析的空间光场变化。与此同时,由于系统无需在末端集成复杂电子器件,因此天然具备小型化、抗电磁干扰以及适用于微创场景等优势,为微型机器人中的高维物理感知提供了一种新的技术路径。
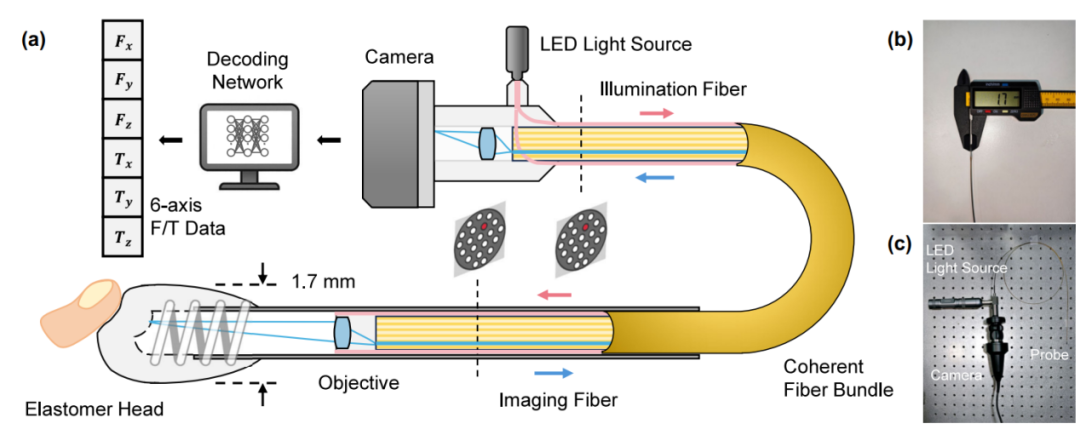
图1:光场编码六维力觉架构
图源:Optica
二、从形变到光场:六维力学状态的光学编码机制
为了进一步理解不同力学载荷如何影响系统光场响应,研究团队结合有限元仿真与实验分析,对弹性穹顶在不同加载条件下的形变模式进行了系统研究。研究人员利用 Abaqus 建立了与真实探针结构对应的三维有限元模型,并分别模拟三维力与三维力矩作用下的空间位移场分布。
结果表明,不同方向的力学加载会诱导具有显著差异的空间形变模式。例如,轴向压力 Fz 会产生近似径向对称的压缩形变,而横向力 Fx、Fy 以及弯曲力矩 Tx、Ty 则会引起明显的方向性弯曲与非对称位移场。与此同时,轴向扭矩 Tz 会进一步形成具有旋转特征的螺旋状位移模式。由于这些形变会改变内部空腔的几何结构与局部表面倾角,因此最终对应形成不同的光场调制模式。
实验结果进一步验证了这一点。在不同加载条件下,研究团队观察到了具有明显区分性的空间光强图案:轴向压缩主要引起整体亮区的径向扩张,而弯曲力矩则会导致方向性的亮度梯度与空间偏移。当多个力学分量同时存在时,不同形变模式会发生叠加,从而形成复杂耦合的光场响应。
这一结果表明,该系统并非简单依赖局部光强变化,而是通过完整空间光场结构对接触状态进行编码,为后续高维力觉解码提供了丰富的物理信息基础。
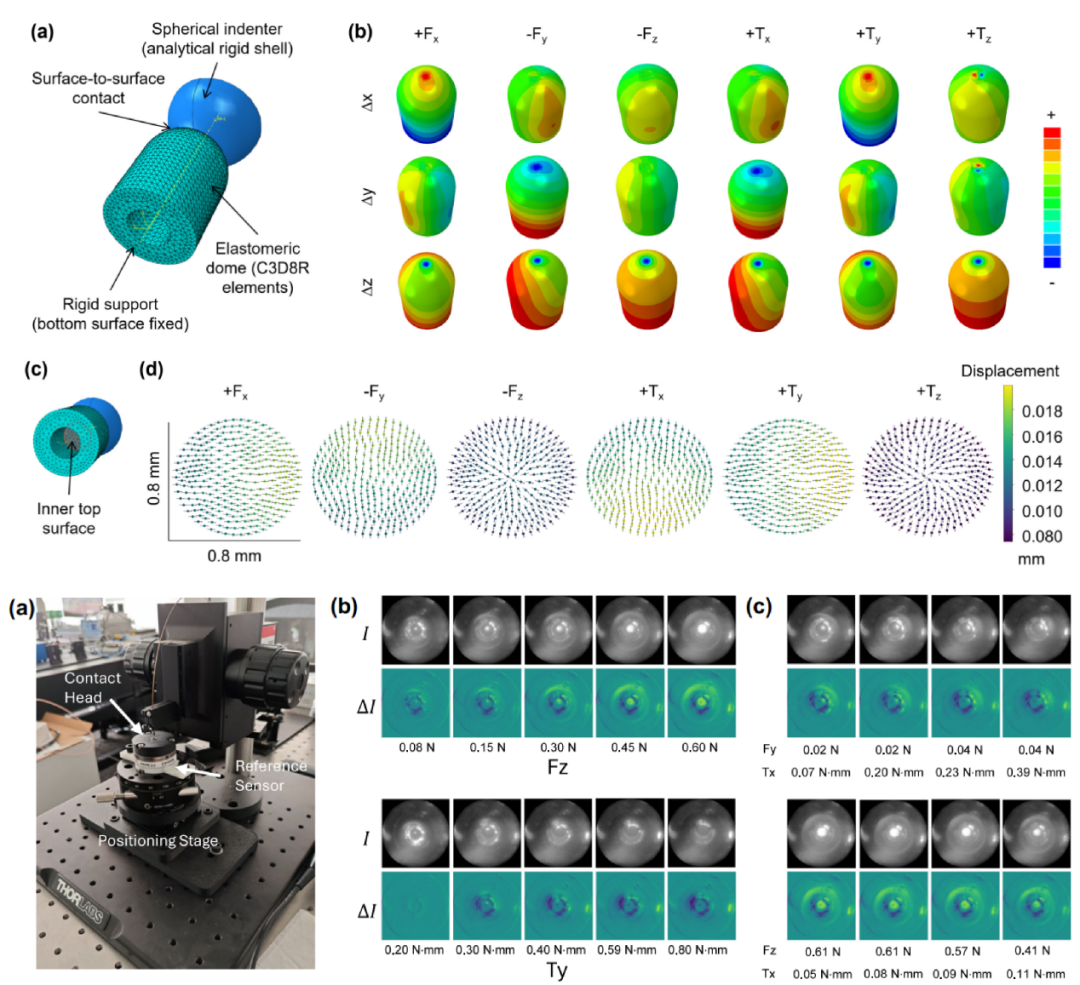
图2:不同力学加载下的形变与光场响应模式
图源:Optica
三、六维力学空间的可观测性:从光场中恢复接触状态
尽管不同力学载荷能够产生不同的形变模式,但在毫米尺度下,各类力与力矩之间仍存在明显耦合。例如,横向力与弯曲力矩都可能导致穹顶发生方向性弯曲,从而形成相似的光场调制特征。因此,如何判断系统是否真正具备六维力学状态的可辨识能力,是该工作的核心科学问题之一。
针对这一问题,研究团队提出了基于像素空间 Jacobian 的可观测性分析框架,通过建立光场响应与六维力学状态之间的局部线性映射,对系统可辨识性进行定量分析。研究人员首先将采集到的空间光场图像展开为高维像素向量,随后通过回归方法估计不同力学分量对应的空间响应模式,并进一步构建六维耦合矩阵与奇异值谱。
分析结果表明,该系统的光场响应能够覆盖完整六维力学空间,即所有六个力学分量原则上均能够从空间光场中恢复。与此同时,研究人员还发现不同力学分量之间存在一定程度的结构耦合,例如横向力与弯曲力矩会产生部分相似的光场响应模式,因此系统在部分方向上呈现一定病态特征。
然而,即便在毫米尺度下存在复杂耦合,各力学分量依然保留具有区分性的空间结构特征,从而保证了系统整体的六维可观测性。这一分析不仅揭示了系统实现六维力觉感知的物理基础,也为后续数据驱动解码框架的设计提供了理论依据。
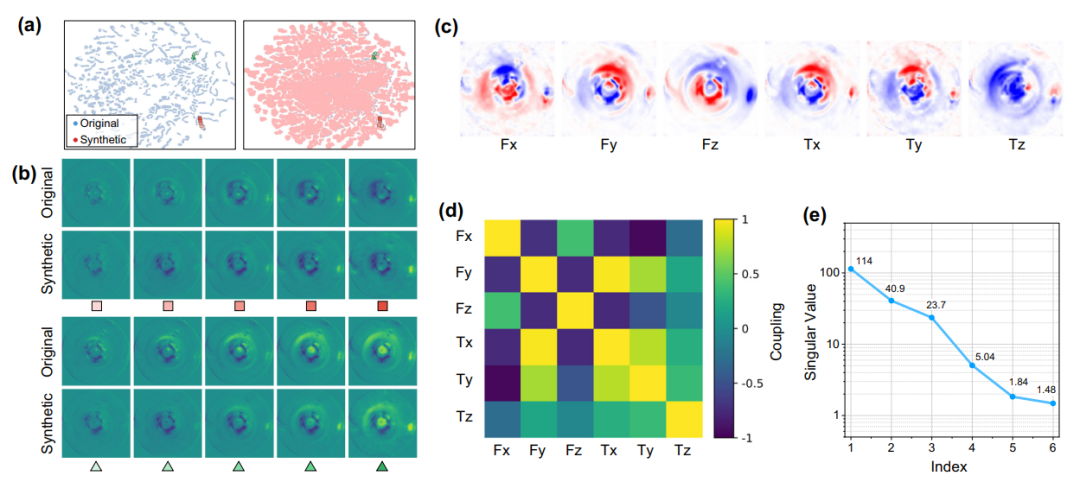
图3:六维力学空间的 Jacobian 可观测性分析
图源:Optica
四、生成式自校准新范式:扩散模型驱动的六维力觉学习
由于六维力学空间具有高度非线性与耦合特性,传统逐点标定方法往往需要大量实验数据,难以满足微型传感系统的快速标定需求。针对这一问题,研究团队进一步提出了基于生成式扩散模型(Latent Diffusion Model, LDM)的自校准框架,实现了六维力学空间的高效学习与连续重建。
该框架首先利用变分自编码器(VAE)将原始光场图像压缩至低维潜空间,并在潜空间内引入以六维力学向量为条件的扩散生成过程。通过逐步去噪与反向生成,模型能够从未受力参考状态出发,连续生成不同受力条件下对应的形变光场图案,从而构建覆盖完整六维力学空间的大规模合成数据集。研究团队共生成超过十万组具有物理一致性的六维力觉样本,用于后续解码网络训练。
进一步地,团队还引入基于差分特征的学习策略,通过比较受力前后的光场变化增强模型对微小形变的敏感性,同时抑制背景照明波动、制造误差以及环境扰动带来的影响。实验结果表明,该框架在有限真实数据条件下依然能够实现稳定、准确的六维力觉解码,并在多个对比实验中优于 ResNet、LSTM 以及 Vision Transformer 等代表性方法。
这一工作表明,生成式模型不仅能够用于图像生成,还能够作为高维物理空间中的“结构化先验”,帮助系统学习复杂光学响应与力学状态之间的非线性映射关系,为未来高维物理感知系统中的数据高效学习提供了新的思路。
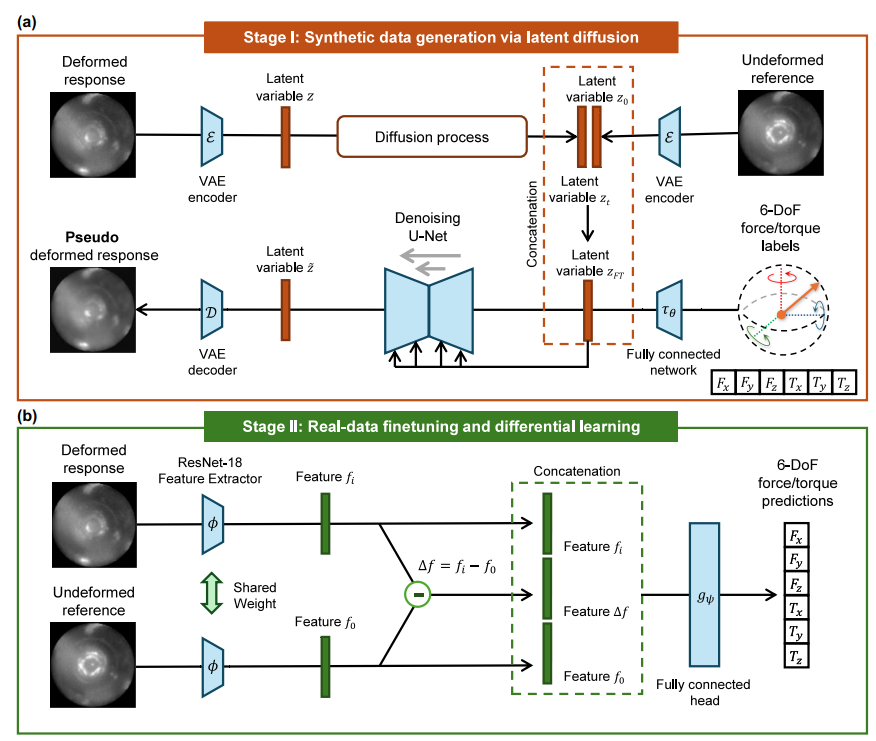
图4:基于扩散模型的六维力觉自校准框架
图源:Optica
五、从肿瘤触诊到微创机器人:微尺度物理感知应用
为了验证该系统在真实交互场景中的应用潜力,研究团队进一步开展了动态加载、环境鲁棒性以及模拟肿瘤触诊实验。实验结果表明,该系统能够实现稳定、低迟滞的六维力觉测量,在多数通道中线性相关系数 R² 超过 0.99,并能够实时跟踪动态力学变化。
与此同时,研究团队还测试了温度变化以及光纤弯曲对系统性能的影响。结果显示,在 25–50°C 温度范围以及不同弯曲状态下,系统仍能够保持较高测量稳定性与预测精度,验证了其在复杂环境中的鲁棒性。
在模拟肿瘤触诊实验中,研究人员将探针沿含有隐藏硬质球体的凝胶表面扫描。实验发现,当探针接近隐藏“肿瘤”区域时,法向力与力矩分布会产生明显变化;进一步重建得到的力矩矢量场还呈现出围绕硬质结构的空间分布特征,实现了对隐藏目标的位置感知与机械表征。
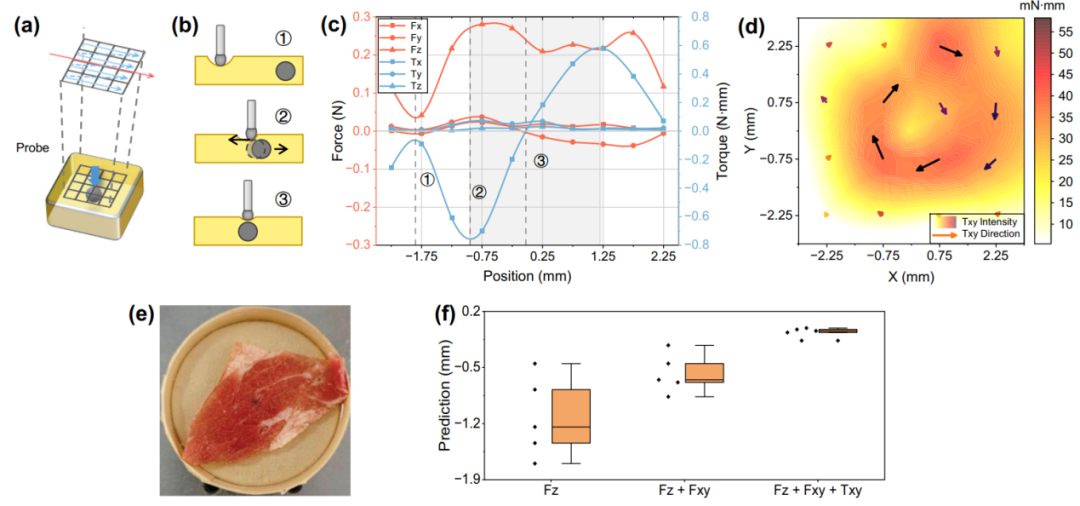
图5:基于六维力觉的模拟肿瘤触诊实验
图源:Optica
六、总结与展望
这项工作体现了微纳力学、计算光学、机器学习与机器人感知的深度交叉融合。研究团队提出的“光场编码力觉”新范式,突破了传统六维力传感器在尺寸、复杂度与系统集成方面的长期限制,首次在 1.7 mm 尺度下实现了全光学六维力与力矩感知,并进一步通过生成式扩散模型构建了面向高维物理空间的自校准框架,为微型机器人中的高维物理感知提供了一种新的技术路径。
与传统依赖复杂电子器件、多通道解调或精密光栅结构的方案不同,该工作将整体接触状态直接编码为空间光场变化,使“接触”本身转化为可解析、可学习的光学信息。这种从“机械接触”到“空间光场”的转化,不仅显著降低了系统复杂度,也为微型化、高鲁棒性以及低成本力觉感知提供了新的可能。
与此同时,研究团队将生成式人工智能引入力觉感知系统,通过扩散模型学习复杂光场与力学状态之间的非线性映射关系,突破了传统高维力觉系统对大规模标定数据的依赖。这种“物理结构 + 生成式模型”协同优化的新思路,也为未来智能传感系统中的数据高效学习与自适应感知提供了新的方向。
随着微创机器人、柔性器械与物理智能系统的快速发展,机器人正逐渐从“看见世界”迈向“理解接触”。相信这一工作在微创手术、导管介入、柔性操作、生物医学检测以及下一代机器人触觉系统等方向,都将展现广阔的应用前景与产业化潜力。
论文信息
W. Zhang, C. Liu, Z. Li, H. Zhang, X. Shen, Q. Lan, C. Gu, J. Yang, "Deformation-encoded light-field transduction enables 6-DoF optical force sensing in a 1.7 mm footprint," Optica 13, 884-899 (2026)DOI: 10.1364/OPTICA.582941.
https://doi.org/10.1364/OPTICA.582941

编辑:赵阳
欢迎课题组投宣传稿
请扫码联系值班编辑






