 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库罗先刚/蒲明博等 Light | 基于像散超构透镜的大视场时空高分辨3D成像
 Banner
Banner本文由论文作者团队撰稿
导读
从自动驾驶到无人机跟踪,激光雷达(LiDAR)作为三维成像核心技术,面临着“大视场、高帧率、高分辨率”难以兼得的瓶颈困境。传统机械扫描LiDAR视场虽宽但体积笨重、速率迟缓,无惯性扫描LiDAR速率提升却受限于窄视场与光束像散,且机械慢轴进一步限制成像帧率。近日,中国科学院光电技术研究所罗先刚院士、蒲明博研究员团队提出基于大视场像散超构透镜(AML)协同光谱-声光扫描的创新方案——既突破慢轴速率限制,又解决扫描轴间协同难题,成功实现兼具36.6 MHz超高帧级点获取速率(FPAR)、102°大视场及6.5 mrad角分辨率的LiDAR新架构。
相关成果以 “Spectral-acoustic-coordinated astigmatic metalens for wide field-of-view and high spatiotemporal resolution 3D imaging” 为题发表于Light: Science & Applications。中国科学院光电技术研究所龚舒健博士生、郭迎辉研究员、李晓银副研究员为论文的共同第一作者。
作为机器人、自动驾驶等智能系统的“眼睛”,LiDAR的性能直接决定了环境感知的实时性与精准度。现有商用车载LiDAR呈现点获取速率(PAR,已提升至数MHz)、分辨率持续提升的发展趋势,高速、大视场、高分辨的应用需求日益迫切。但传统LiDAR仍面临三大核心瓶颈:
一是尽管无惯性光谱扫描已能实现数十MHz的PAR,但现有双轴扫描机制存在轴间速率不匹配问题,限制有效成像帧率;
二是双轴级联扫描带来的视场失配与光束像散问题,将显著降低空间分辨率;
三是视场角与分辨率存在固有矛盾,传统光学系统难以兼顾大视场覆盖与高分辨探测,亟需通过新型光学设计理念与技术方案解决。
近年来,得益于微纳加工技术的持续发展,超构表面技术凭借高自由度多维光场调控能力及轻薄易集成的特性,为光学成像系统的多功能化、小型化发展提供了全新解决方案。
一、总体概念:基于时空谱协同调控突破LiDAR关键指标核心矛盾
此前,该研究团队已提出基于旋转—平移对称变换的二次相位超构透镜【Opt. Express, 2017, 25: 31471】,并成功实现178°大视场被动成像【Adv. Mater., 2021, 33: 2008157】。在此基础上,团队将这一技术进一步拓展至LiDAR这类主动激光成像场景,通过像散超构透镜(AML)协同光谱-声光扫描的创新设计,同步提升大视场下的成像分辨率、速率并解决扫描轴间匹配问题,最终突破传统技术“大视场、高帧率、高分辨率”难以兼顾的核心矛盾。具体技术路线如下:(1) 利用二次相位的大视场角优势,以其作为AML的基础相位;(2) 创新性地在二次相位中引入高阶像散相位,以此抑制光束像散,提升大视场下的角分辨率;(3) 实现AML与光谱-声光扫描深度融合,既解决了级联扫描轴间的视场失配问题,又实现了高帧率成像,最终构建兼具大视场、高时间分辨率(高成像帧率)与高空间分辨率(高角分辨能力)的LiDAR新架构(图1)。
该架构以AML为核心光学元件,融合光谱-声光扫描模块,可捕捉大视场范围内高速运动目标(图1a)。为实现高速二维光束扫描,团队通过光谱扫描(快轴,像素级点获取速率PPAR达数十MHz)与声光偏转器(AOD,慢轴,MHz级点切换速率)的“速率匹配”设计,当慢轴切换与快轴扫描周期完全同步时,有效帧级点获取速率(FPAR)可与PPAR持平,实现全固态无冗余扫描(图1b)。针对光束像散与视场窄的痛点,AML通过独特的像散相位分布,既能校正色散元件引发的光束像散,又能扩展光谱扫描视场;而普通超构透镜(NML)因无像散补偿,无法在实现视场扩展的同时保持高分辨率(图1c)。该LiDAR架构最终实现了36.6 MHz超高FPAR、102°水平视场与0.37°(6.5 mrad)空间分辨率,可分辨155 cm处1 cm线宽目标,亦可清晰捕捉高速旋转风扇的运动轨迹(图1d)。
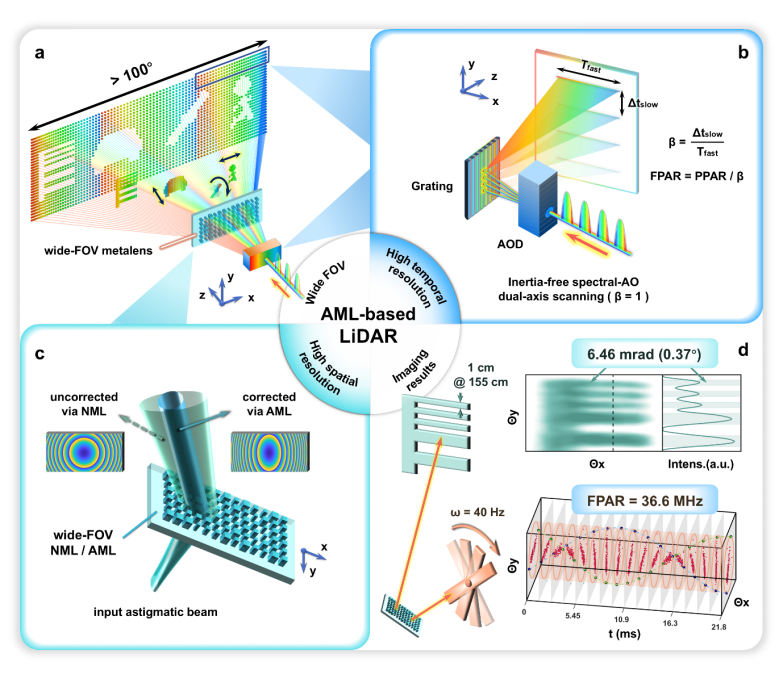
图1:基于像散超构透镜(AML)的大视场时空高分辨LiDAR概念图
二、系统架构:光谱-声光-超构透镜的协同设计
实验上,团队搭建了由“光源编码-双轴扫描-光场调控-探测重建”组成的完整LiDAR系统(图2a):宽谱脉冲光经光谱-时间编码后转化为离散啁啾脉冲序列,将光谱扫描周期“时间拉伸”至AOD可响应的us量级,再通过AOD和闪耀光栅(BG)完成光谱-声光级联扫描(图2b),以此实现“速率匹配”设计;系统后端集成基于AML的扩视场光学系统,在扩展视场的同时抑制光束发散;目标回波信号由光电倍增管(PMT)探测,基于脉冲飞行时间(TOF)信息重建3D场景。
作为系统核心器件,AML的独特设计提升了LiDAR的空间探测能力,与未经调制的0级光束相比,AML既能扩展视场,又能提升空间分辨率(图2c)。这是由于BG的各向异性造成了光束像散(光束在色散方向的发散角增大,在垂直于色散方向的发散角保持不变),即BG出射光束将呈“椭圆-圆形-椭圆”演化的像散特性。NML虽能扩视场却无法解决像散,发散角同步增大,而所提出的AML通过额外引入高阶像散相位可同时校正光束像散与扩展视场。
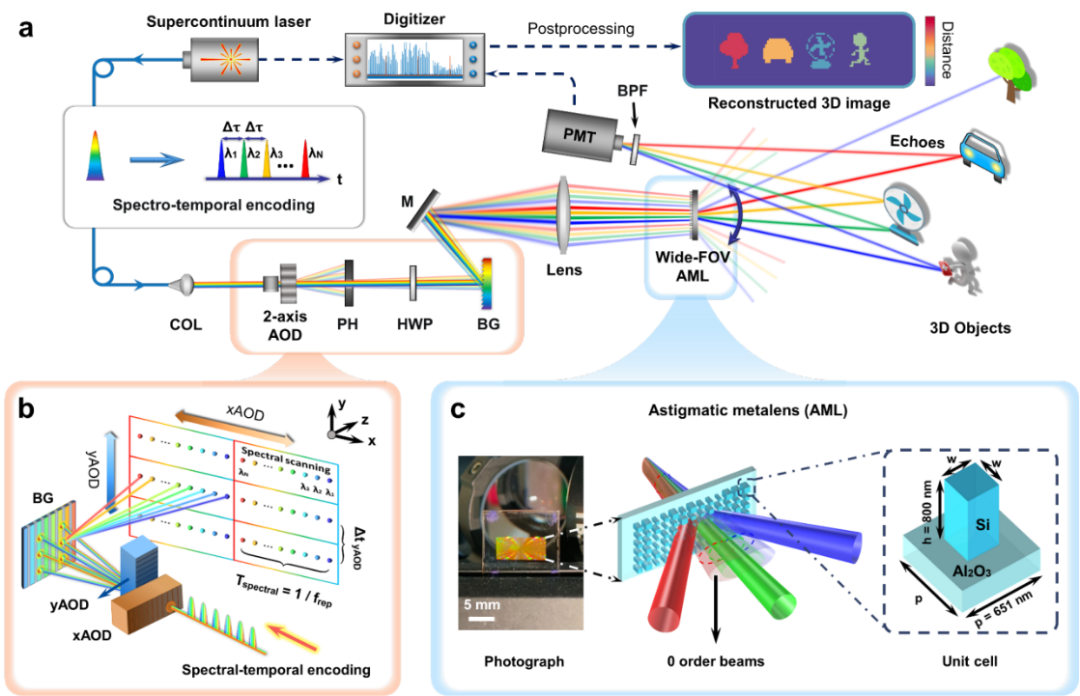
图2:(a) 实验装置示意图;(b) 光谱-声光级联扫描架构;(c) 像散超构透镜(AML)可同时扩展视场及提升空间分辨率(左:实物图;右:超原子单元结构),显著增强LiDAR的空间探测能力
三、高时空分辨率3D成像
团队针对动态目标成像以验证高时间分辨率。实验场景包含“F-A-S-T”字母靶标与旋转风扇,目标视场覆盖±40°(图3a)。借助高达36.6 MHz的FPAR,系统实现了734 fps的成像帧率(每帧600×83扫描点数),图3b为对旋转风扇成像结果的时间切片;补充材料视频展现了最高实现的20.3 kfps超高帧率。此外,团队采用分辨率靶开展实验(图3c),最终实现了6.46 mrad空间分辨率(图3d,e)。
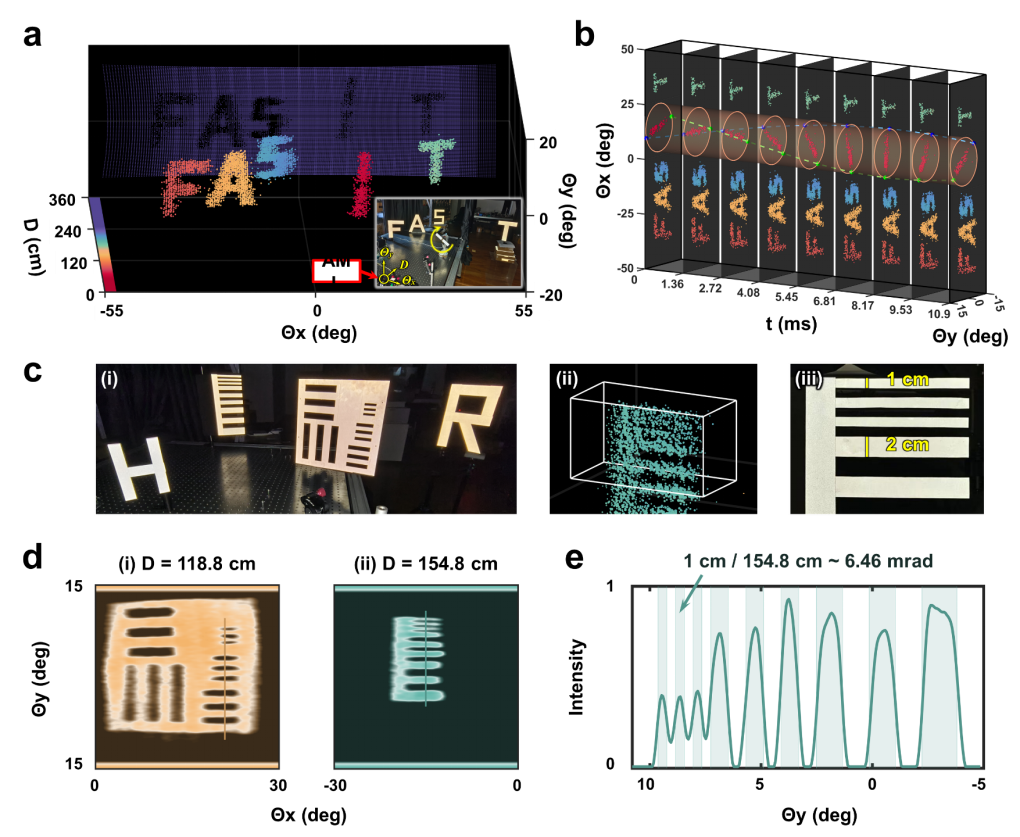
图3:(a) 动态3D成像场景及结果;(b) 风扇旋转的时间演化切片;(c) 静态场景及直接点云成像结果;(d) 经亚像素重建所得不同深度切片图像;(e) 图(d)(ii)中直线位置强度剖面
总结与展望
本研究通过像散超构透镜与光谱-声光协同扫描的创新融合,从原理上突破了LiDAR“大视场、高帧率、高分辨率”不可兼得的长期困境。该系统不仅具备36.6 MHz超高点获取速率、102°大视场、0.37°高分辨率的综合优势,还兼具集成化、小型化的工程化特性,在自动驾驶、无人机跟踪、集成通感一体化等领域具有广阔应用前景。未来,团队将进一步优化激光光源与编码技术,拓展探测距离与环境适应性,推动该技术从实验室走向产业化应用,为下一代光学智能体(OIA)的感知能力升级提供核心支撑。
论文信息
Gong, S., Guo, Y., Li, X. et al. Spectral-acoustic-coordinated astigmatic metalens for wide field-of-view and high spatiotemporal resolution 3D imaging. Light Sci Appl 15, 85 (2026).
https://doi.org/10.1038/s41377-025-02180-7

编辑:赵阳
如下数据来自Web of Science,Light: Science & Applications的高被引文章数量在国内同类期刊中稳居领军地位。截至目前:
超过3000次引用的文章有1篇
https://doi.org/10.1038/lsa.2014.99
超过2000次引用的文章有2篇
https://doi.org/10.1038/s41377-019-0194-2
超过1000次引用的文章有8篇
https://doi.org/10.1038/lsa.2014.30
https://doi.org/10.1038/s41377-020-0341-9
https://doi.org/10.1038/lsa.2016.133
https://doi.org/10.1038/lsa.2017.168
https://doi.org/10.1038/lsa.2017.141
https://doi.org/10.1038/s41377-021-00658-8
超过800次引用的文章有9篇
https://doi.org/10.1038/lsa.2014.48
超过700次引用的文章有15篇
https://doi.org/10.1038/s41377-018-0078-x
https://doi.org/10.1038/lsa.2013.28
https://doi.org/10.1038/s41377-020-0326-8
https://doi.org/10.1038/s41377-022-00714-x
https://doi.org/10.1038/s41377-020-0264-5
https://doi.org/10.1038/s41377-018-0060-7
超过600次引用的文章有22篇
https://doi.org/10.1038/lsa.2015.30
https://doi.org/10.1038/lsa.2015.67
https://doi.org/10.1038/s41377-020-0268-1
https://doi.org/10.1038/lsa.2014.46
https://doi.org/10.1038/lsa.2014.60
https://doi.org/10.1038/lsa.2017.146
https://doi.org/10.1038/lsa.2017.39
超过500次引用的文章有39篇
https://doi.org/10.1038/lsa.2015.131
https://doi.org/10.1038/s41377-022-00897-3
https://doi.org/10.1038/s41377-020-00421-5
https://doi.org/10.1038/s41377-021-00639-x
https://doi.org/10.1038/lsa.2013.26
https://doi.org/10.1038/lsa.2016.17
https://doi.org/10.1038/lsa.2014.94
https://doi.org/10.1038/lsa.2014.42
https://doi.org/10.1038/lsa.2015.97
https://doi.org/10.1038/s41377-019-0148-8
https://doi.org/10.1038/lsa.2016.76
https://doi.org/10.1038/s41377-018-0091-0
https://doi.org/10.1038/s41377-021-00501-0
https://doi.org/10.1038/lsa.2017.134
https://doi.org/10.1038/lsa.2014.58
https://doi.org/10.1038/s41377-022-00717-8
https://doi.org/10.1038/lsa.2012.1
超过400次引用的文章有63篇
https://doi.org/10.1038/s41377-020-00353-0
https://doi.org/10.1038/s41377-021-00497-7
https://doi.org/10.1038/s41377-019-0201-7
https://doi.org/10.1038/s41377-020-0331-y
https://doi.org/10.1038/lsa.2015.59
https://doi.org/10.1038/s41377-021-00527-4
https://doi.org/10.1038/s41377-018-0013-1
https://doi.org/10.1038/s41377-019-0191-5
https://doi.org/10.1038/s41377-021-00551-4
https://doi.org/10.1038/lsa.2014.22
https://doi.org/10.1038/lsa.2015.137
https://doi.org/10.1038/s41377-022-00851-3
https://doi.org/10.1038/s41377-018-0038-5
https://doi.org/10.1038/s41377-020-00367-8
https://doi.org/10.1038/s41377-019-0205-3
https://doi.org/10.1038/s41377-018-0090-1
https://doi.org/10.1038/s41377-021-00655-x
https://doi.org/10.1038/lsa.2016.243
https://doi.org/10.1038/s41377-021-00469-x
https://doi.org/10.1038/s41377-021-00500-1
https://doi.org/10.1038/s41377-020-0246-7
https://doi.org/10.1038/lsa.2016.144
https://doi.org/10.1038/lsa.2017.16
https://doi.org/10.1038/lsa.2013.6
超过300次引用的文章有127篇
超过200次引用的文章有228篇
超过100次引用的文章有560篇
超过50次引用的文章有1092篇
欢迎课题组投宣传稿
请扫码联系值班编辑






