 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库全球海洋观测体系全景
点击下面卡片,快速关注本公众号
海洋覆盖地球表面的 71%,驱动着全球气候系统、碳循环和生物多样性。然而,相比陆地和大气,海洋仍然是观测最不充分的领域。本文将全面梳理当前全球海洋观测的组织架构、观测网络、核心平台和卫星系统,覆盖所有主要国际海洋观测计划。
一、顶层框架:GOOS 全球海洋观测系统
1.1 什么是 GOOS?
GOOS(Global Ocean Observing System,全球海洋观测系统)是全球海洋观测的顶层协调框架,由四个国际组织共同主办:
| IOC/UNESCO | ||
| WMO | ||
| UNEP | ||
| ISC |
GOOS 的使命是领导海洋观测社区,构建一个集成的、响应式的、可持续的观测系统,为气候服务、业务预报和海洋健康提供关键信息。
1.2 GOOS 的六大组成部分
1. 专家小组:综合需求分析,指导观测系统设计 2. 观测协调组:维持、加强和扩展观测网络实施 3. 预报系统团队:改进海洋预报的能力和质量 4. 项目:推动创新,拓展新领域 5. 区域联盟(GRA):连接全球框架与区域实施 6. OceanOPS:国际观测平台协调中心
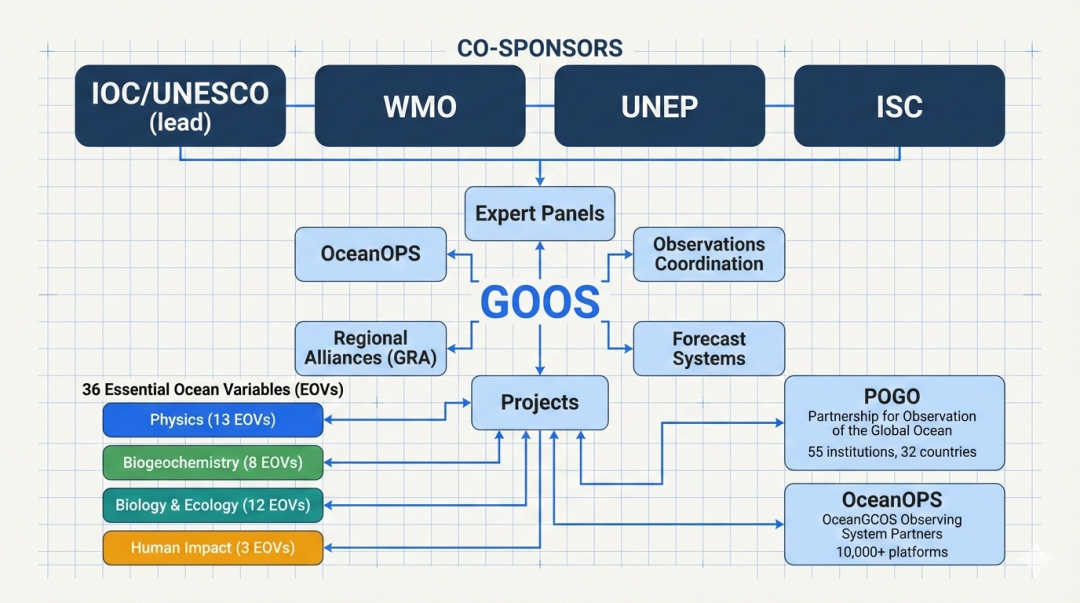
1.3 海洋基本变量(EOV)
GOOS 定义了 36 个海洋基本变量(Essential Ocean Variables, EOV),这是评估海洋状态所需的最小变量集合:
| 物理 | ||
| 生物地球化学 | ||
| 生物与生态 | ||
| 人类影响 |
EOV 是连接观测需求与观测能力的桥梁,也是各观测网络设计的依据。
1.4 OceanOPS — 全球观测协调中心
OceanOPS 是 WMO/IOC 联合中心,总部位于法国布雷斯特(Brest),自2000年起协调全球海洋和海洋气象观测网络:
• 监控 10000+ 个现场海洋气象观测平台 • 开发基于 Web 的监测工具 • 团队仅 8 人,却协调着全球最复杂的观测基础设施 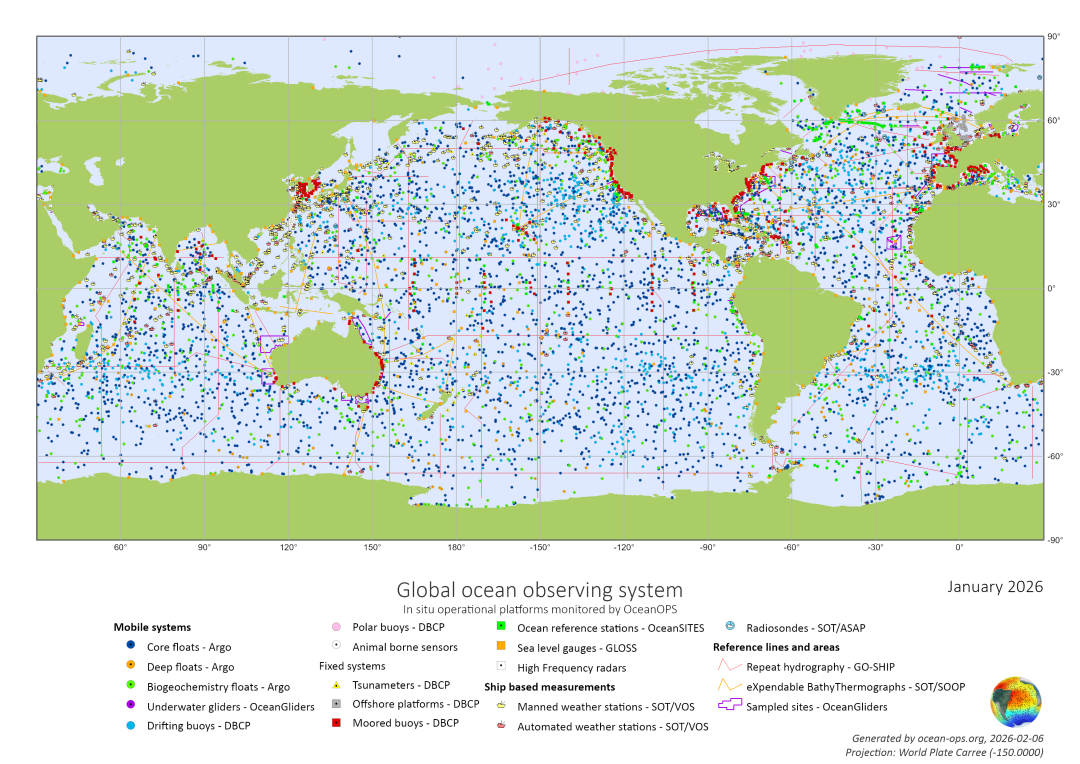
1.5 POGO — 全球海洋观测伙伴关系
POGO(Partnership for Observation of the Global Oceans)成立于1999年,是由全球海洋研究机构负责人共同发起的非政府组织,是GOOS的正式合作伙伴。
| 32 个国家、55 个成员机构 | |
核心使命:推动全球业务化海洋学发展,促进全球海洋观测系统的建设、运行和创新。POGO 的成员机构提供了设计、建造和运营全球海洋观测系统所需的专业知识、经验和基础设施。
三大战略方向:
1. 观测创新:推动低成本水听器等新技术在海洋观测中的应用 2. 能力建设:通过 POGO-SCOR 奖学金计划,资助发展中国家早期职业科学家赴海外顶尖机构研修 1-3 个月。迄今已培训来自 90+ 个国家的约 1,300 名早期职业科学家 3. 倡导与推广:提升全球对海洋观测重要性的认知
POGO 在体系中的独特角色是作为学术研究机构与观测系统之间的桥梁。它不直接运营观测网络,而是协调全球顶尖海洋机构的研究能力,为观测系统的科学设计和技术创新提供支撑。
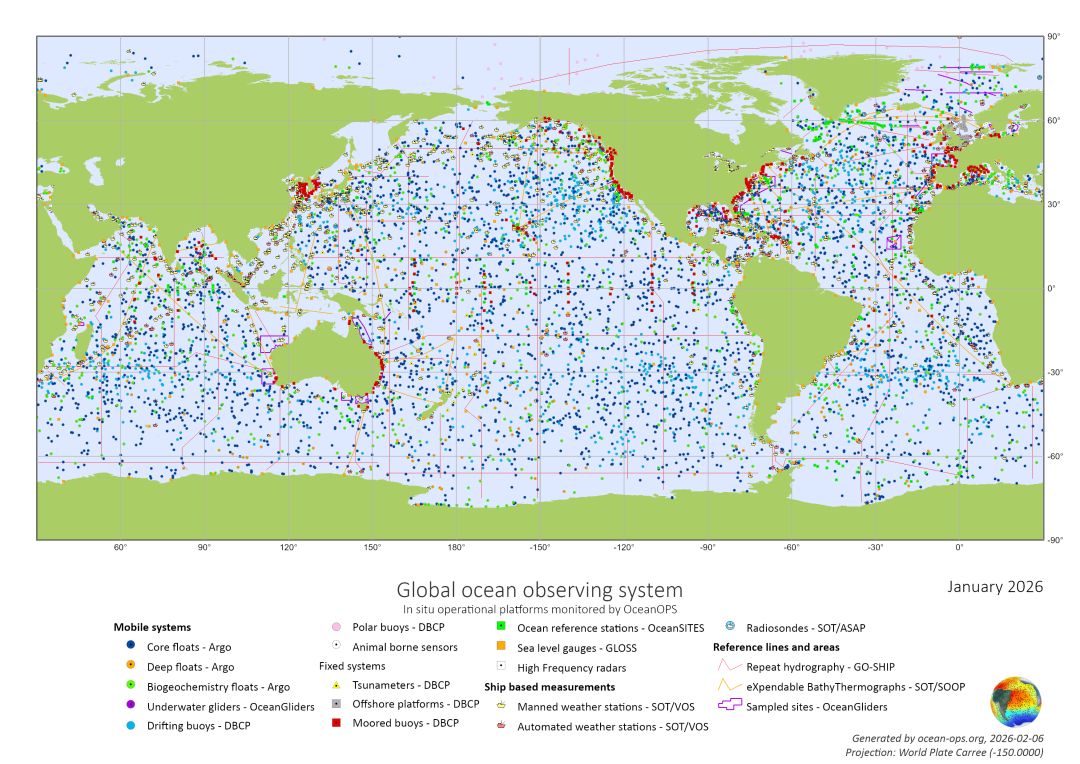
二、现场观测网络
全球海洋现场(in situ)观测由多个互补的观测网络组成,各自覆盖不同的时空尺度和海洋深度。
2.1 Argo — 全球海洋剖面浮标阵列
Argo是过去25年海洋观测领域最具革命性的成就。
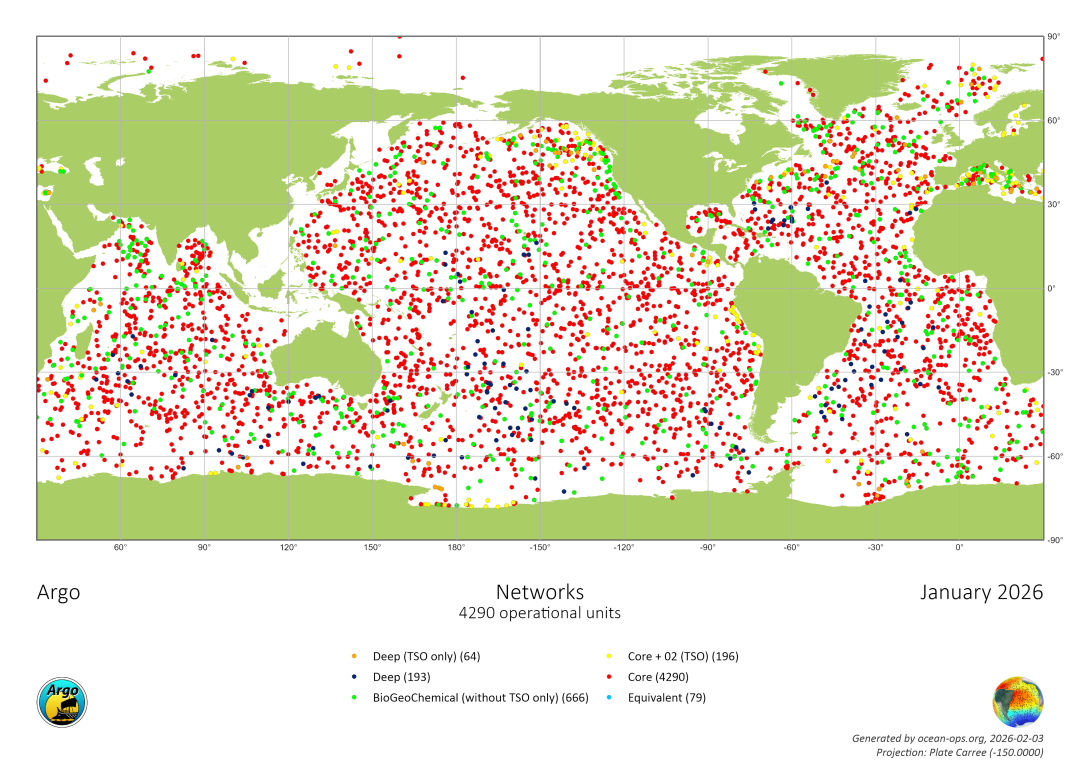
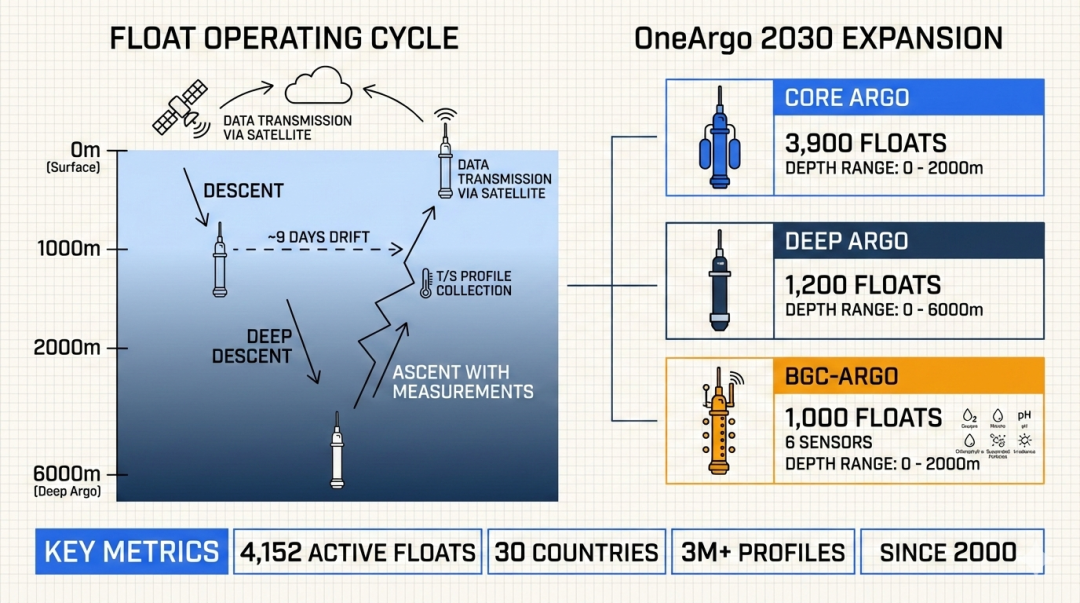
基本原理:自主式剖面浮标在海面和预设深度之间循环升降,每次上浮时测量温盐剖面并通过卫星传输数据,然后再次下潜。
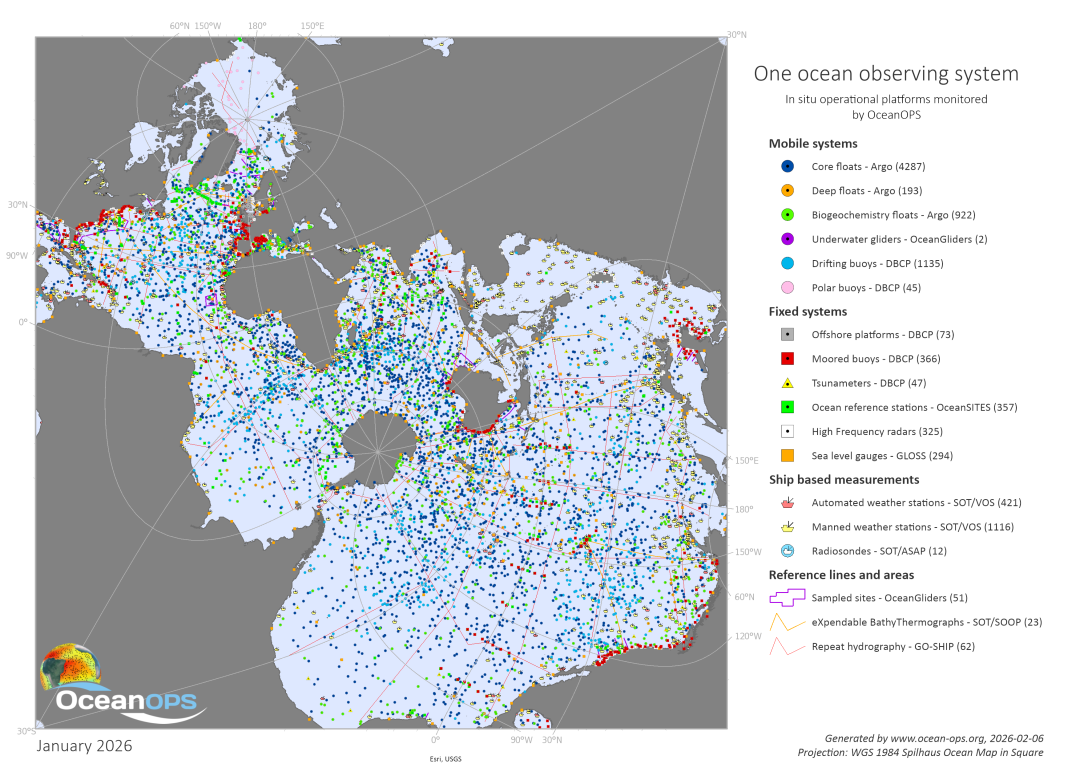
| ~4,152 个 | |
| 300 万+ | |
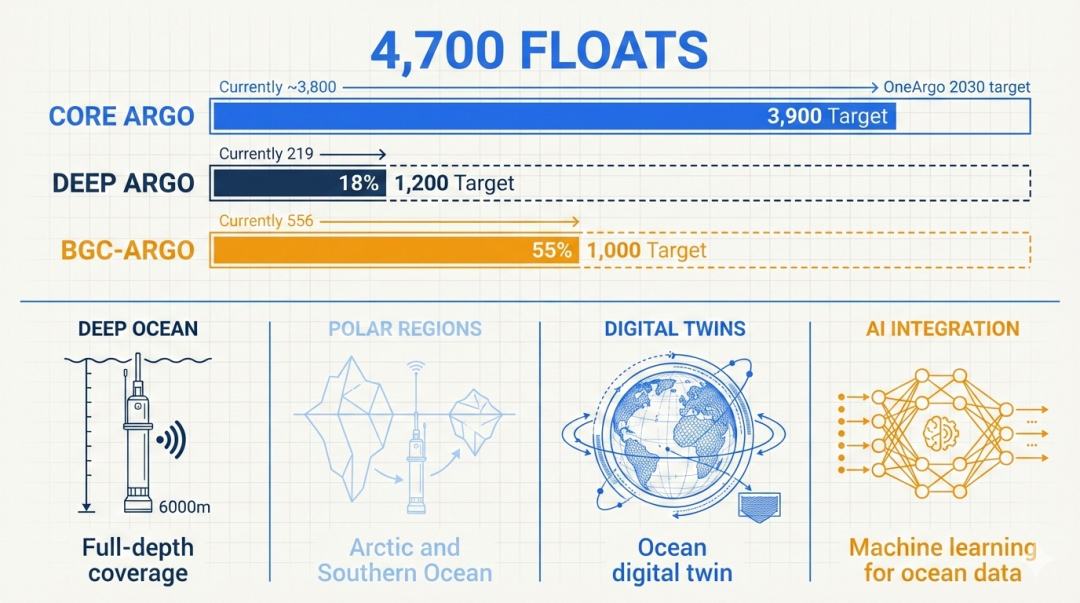
三大扩展方向(OneArgo 计划,目标 2030 年):
| Core Argo | ||
| Deep Argo | ||
| BGC-Argo |
BGC-Argo 六大传感器:
1. 溶解氧 2. pH 3. 硝酸盐 4. 叶绿素 a 5. 后向散射(悬浮颗粒) 6. 下行辐照度
Argo 是 G7 未来海洋倡议(G7 FSOI, 2025)的顶级优先事项。
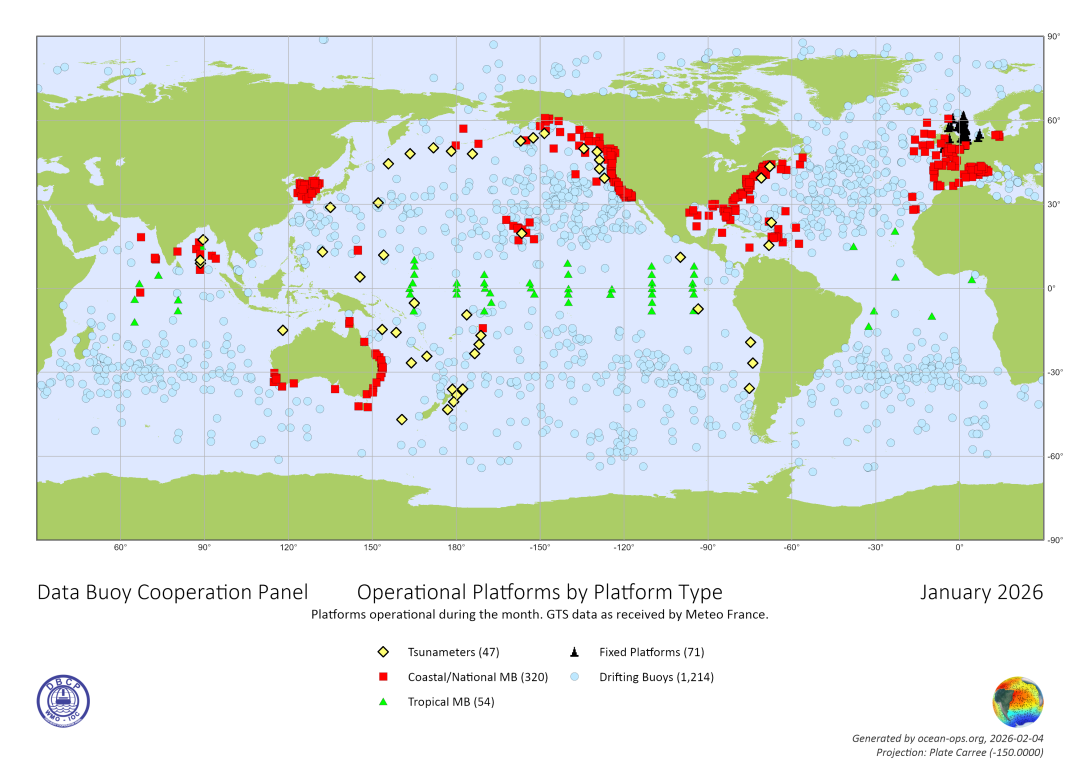
2.2 DBCP — 数据浮标合作组
DBCP 成立于 1985 年,是 WMO/IOC 联合机构,协调全球漂流浮标和系泊浮标网络:
| 漂流浮标 | ||
| 系泊浮标 |
漂流浮标在水下 15 米处配有锚定帆(drogue),随海流漂移,提供全球海表流场和 SST 数据。
2.3 全球热带系泊浮标阵列(GTMBA)
GTMBA 是三大洋热带海域的骨干实时观测系统:
| TAO/TRITON | |||
| PIRATA | |||
| RAMA |
GTMBA 提供从海面到深层的实时温度、盐度、海流、气象数据。2010-2023 年间,超过 1,400 篇 SCI 论文引用了 GTMBA 数据。
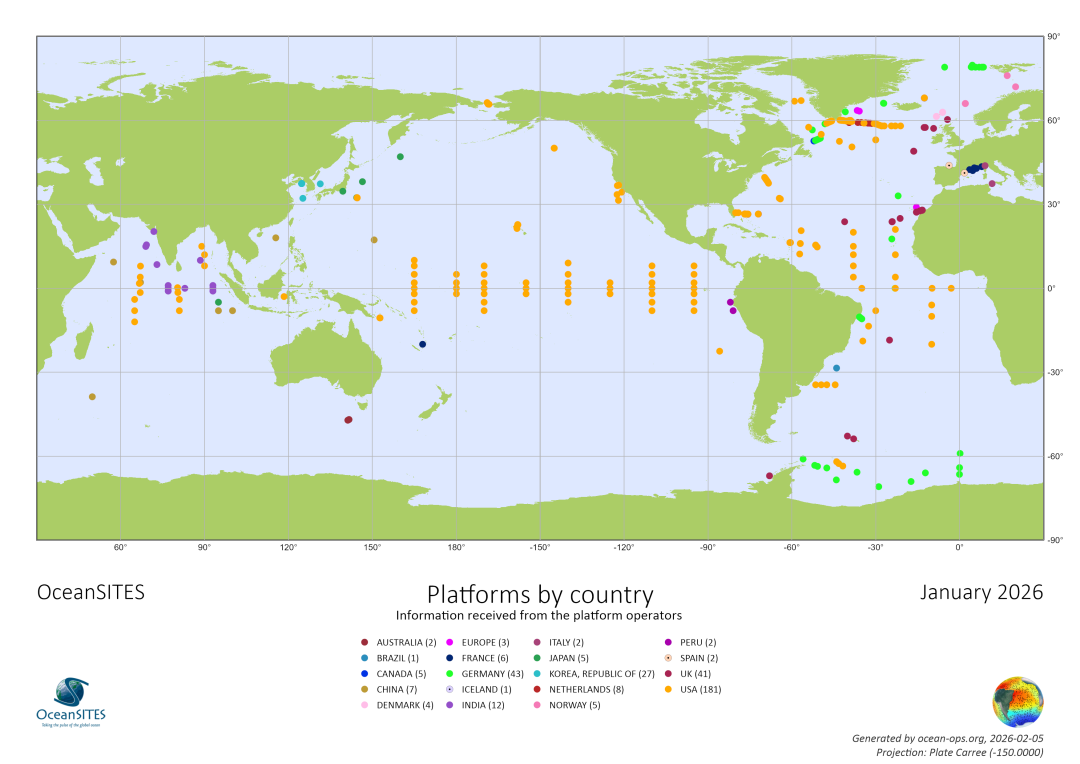
2.4 OceanSITES — 深海时间序列观测站
OceanSITES 是全球长期深海(开阔大洋)参考站网络:
| 60+ 个 | |
代表性站点:
• BATS(百慕大大西洋时间序列) • HOT(夏威夷海洋时间序列) • PAP(豪猪深海平原) • HAUSGARTEN(北极深海观测站) • SOTS(南大洋时间序列) • DYFAMED(地中海深水站)
OceanSITES 测量数十个变量,是研究海洋长期变化的锚点。
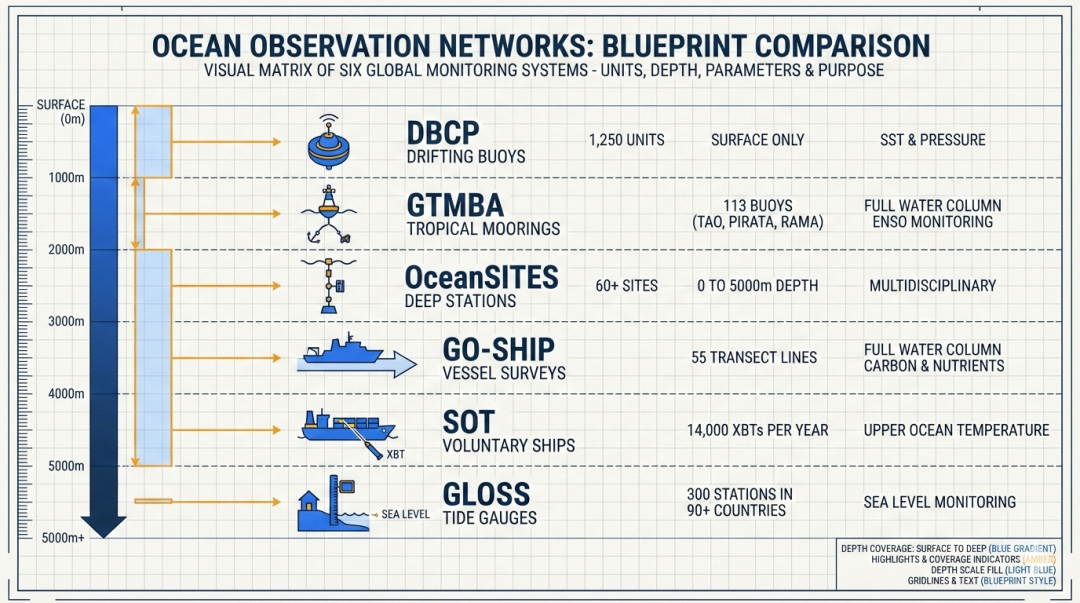
2.5 GO-SHIP — 全球船基水文调查计划
GO-SHIP 是唯一能够获取全水柱、高分辨率、多学科物理化学生物参数的观测手段:
| 55 条 | |
测量参数:温度、盐度、溶解氧、营养盐(硅酸盐、磷酸盐、硝酸盐)、碳系统(DIC、碱度、pH、pCO₂)、示踪剂(CFCs、SF₆)。
重大发现:
• 精确测定了深层水的增暖速率 • 量化了深海碳增量 • 记录了表层和中层水 CO₂ 增加及海洋酸化进程 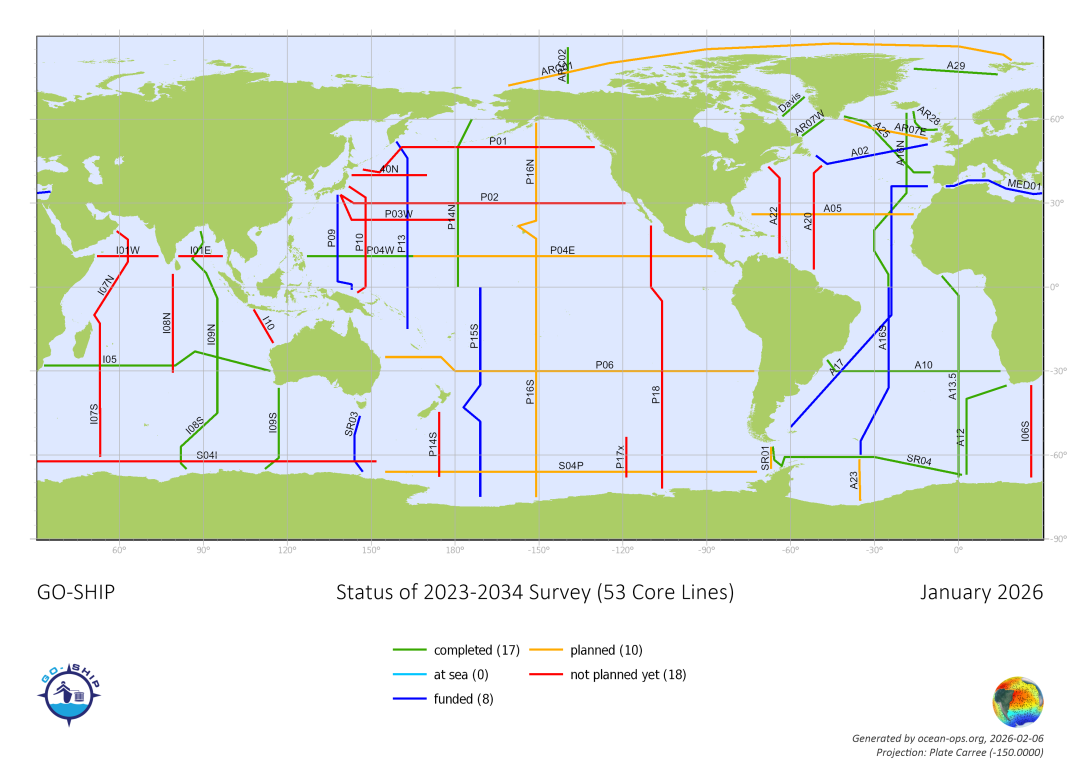
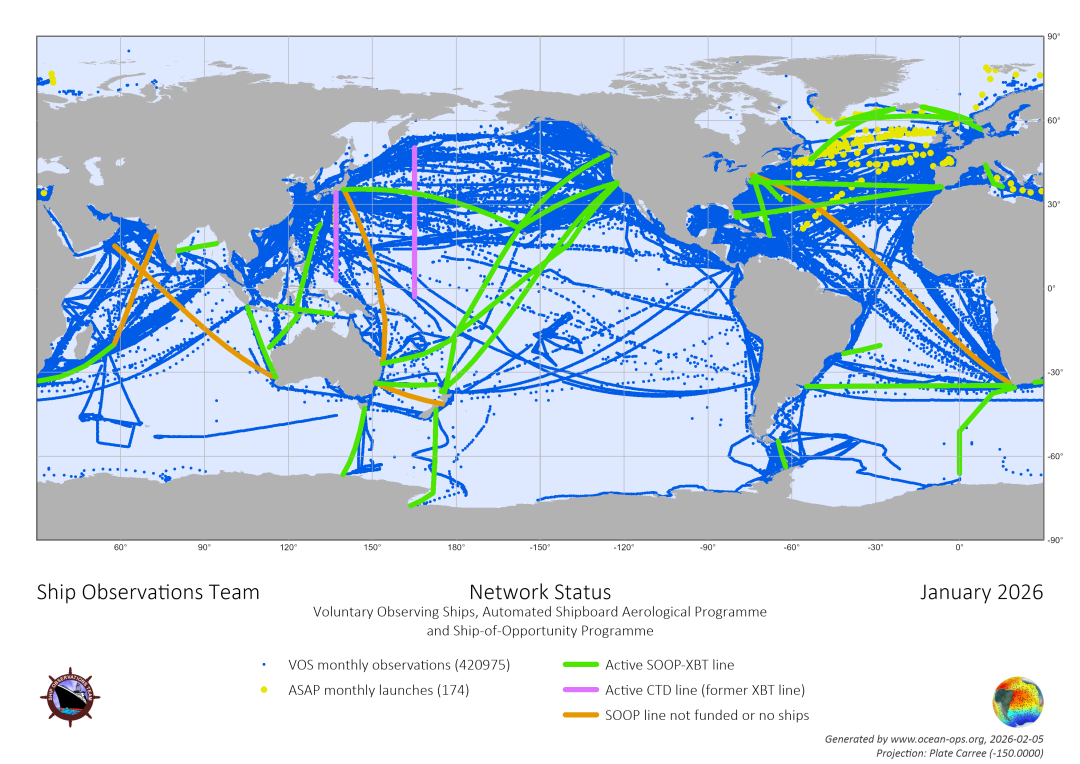
2.6 SOT — 船舶观测队
SOT 是 WMO/IOC 联合成立的船基观测协调机制,包含三个子计划:
| VOS | ||
| SOOP | ||
| ASAP |
SOOP 在 36 条参考航线上系统投放 XBT(抛弃式温深仪),提供上层海洋热含量数据。
2.7 GLOSS — 全球海平面观测系统
GLOSS 成立于 1985 年,由 IOC 主持,是全球验潮站网络的协调框架:
| 90+ | |
| 300 个 | |
数据中心:
• PSMSL(永久平均海面服务):成立于 1933 年,利物浦,负责全球验潮数据汇集 • SONEL:GNSS 数据,测量验潮站自身的地壳运动
GLOSS 数据是校准卫星高度计、监测全球海平面上升的基础。
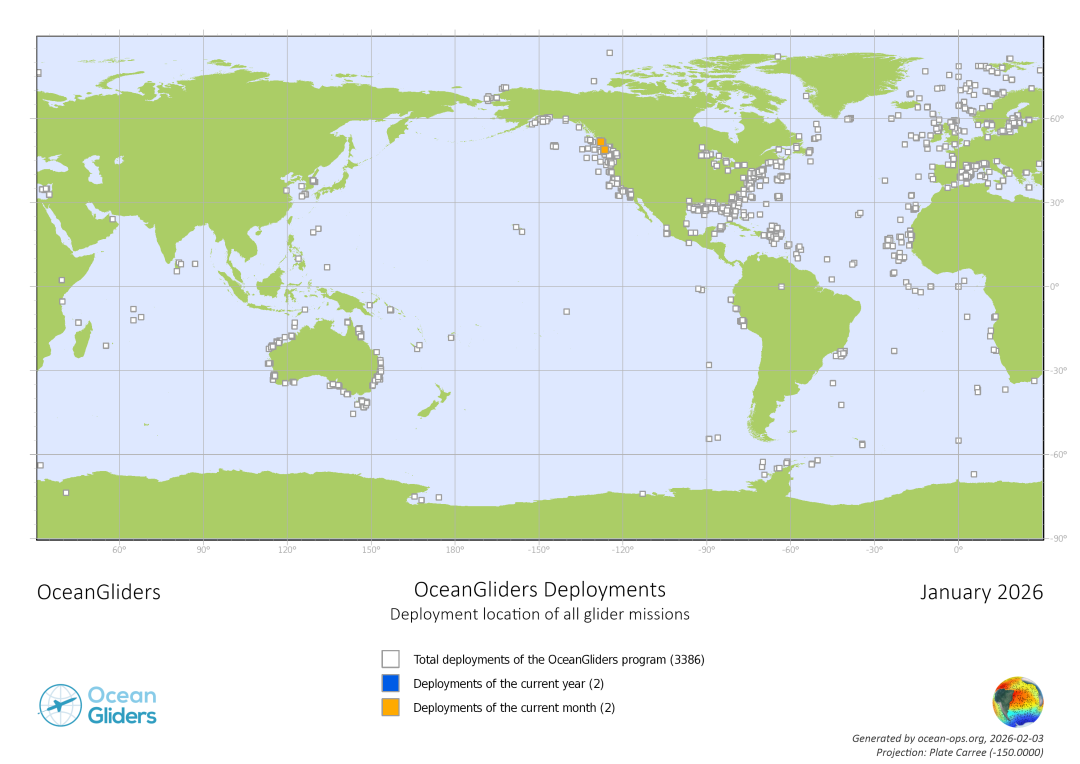
2.8 海洋滑翔机glider
海洋滑翔机是近年快速发展的自主水下观测平台:
| Spray | ||
| Seaglider | ||
| Slocum |
应用场景:湾流监测、加利福尼亚海岸气候变率(CUGN 网络)、飓风响应、深水油井监测。
2.9 HF 雷达 — 近岸表面海流
高频(HF)雷达是唯一能实时、大面积测量近岸表面海流的技术:
美国 IOOS 网络目前运营约 180 部 HF 雷达,覆盖大部分海岸线。应用包括搜救、溢油追踪、航道规划和沿岸工程。
三、卫星海洋观测
卫星是实现全球覆盖的唯一手段,提供多种海洋基本变量的连续监测。
3.1 海面高度计(测高卫星)
| TOPEX/Poseidon | |||
| Jason-1/2/3 | |||
| Sentinel-6A | |||
| Sentinel-6B | |||
| SWOT |
SWOT 的革命性意义:首次实现二维高分辨率海面高度成像,能探测 亚中尺度(15-100 km)海洋过程,突破传统星下点高度计的限制。
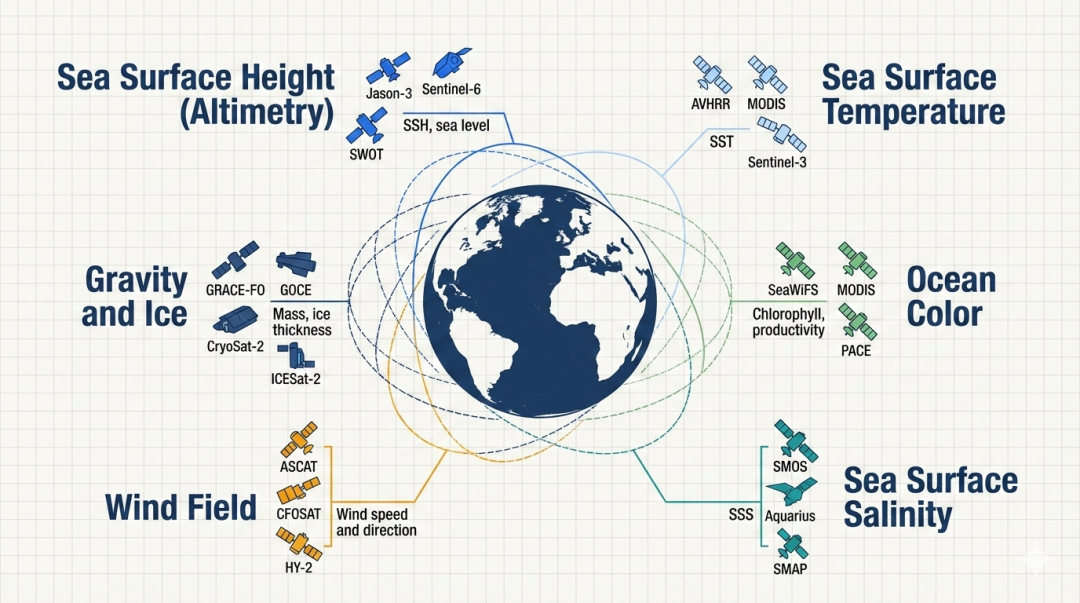
3.2 海面温度(SST)
| AVHRR | ||
| MODIS | ||
| VIIRS | ||
| AMSR-2 | ||
| Sentinel-3 SLSTR |
3.3 海洋颜色(水色遥感)
| SeaWiFS | ||
| MODIS | ||
| OLCI | ||
| PACE OCI |
3.4 海面盐度
| SMOS | ||
| Aquarius/SAC-D | ||
| SMAP |
3.5 海面风场
| ASCAT | ||
| RapidScat | ||
| CFOSAT SWIM/SCAT | ||
| HY-2 系列 |
3.6 重力与海底地形
| GRACE/GRACE-FO | ||
| GOCE | ||
| CryoSat-2 | ||
| ICESat-2 |
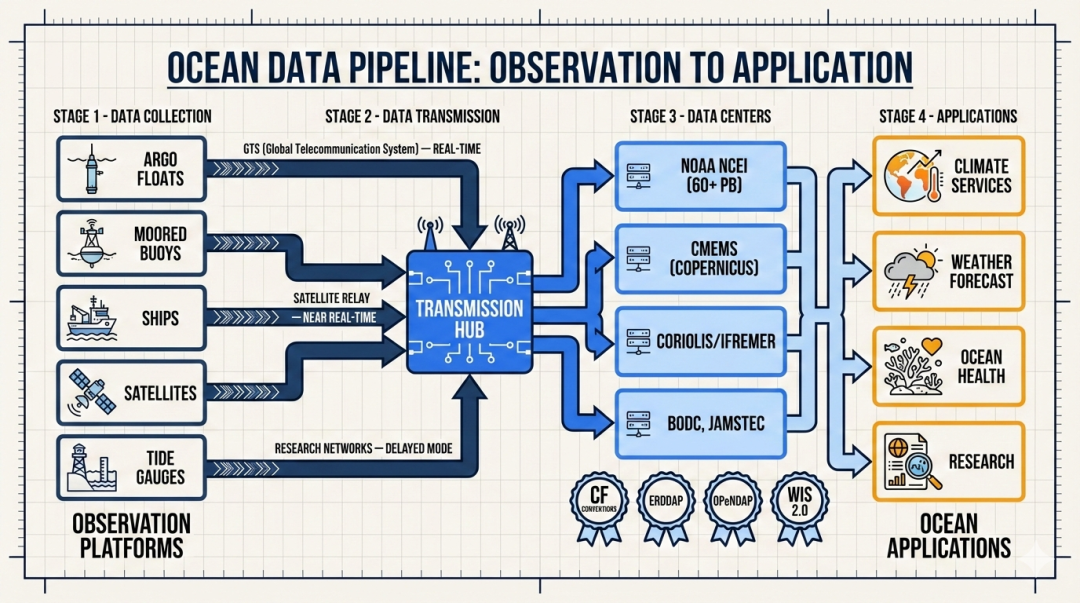
四、数据管理与共享
4.1 主要数据中心
| NOAA NCEI | ||
| Copernicus Marine Service(CMEMS) | ||
| IFREMER/Coriolis | ||
| BODC | ||
| JAMSTEC | ||
| NODC(中国) |
4.2 数据标准与协议
| WMO GTS | |
| CF Conventions | |
| IODE/ODP | |
| ERDDAP | |
| OPeNDAP | |
| WIS 2.0 |
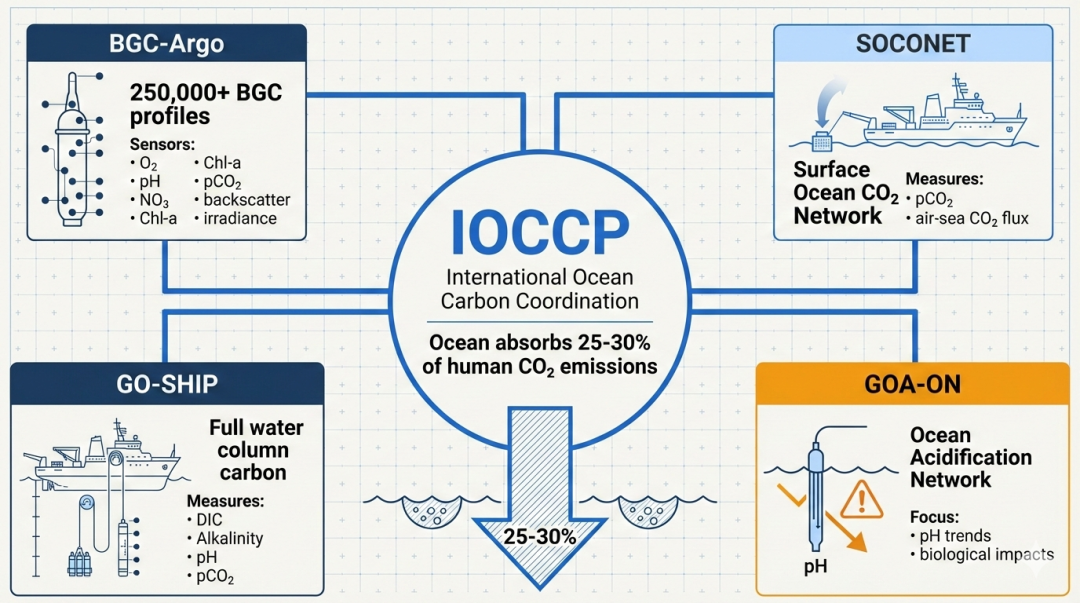
五、国际碳观测协调
海洋吸收了约 25-30% 的人类排放 CO₂,碳观测是海洋观测的核心维度:
| IOCCP | |
| SOCONET | |
| BGC-Argo | |
| GO-SHIP | |
| GOA-ON |
BGC-Argo 已累计采集 250,000+ 个生物地球化学剖面。
六、区域海洋观测系统
| US IOOS | ||
| EuroGOOS | ||
| IMOS | ||
| IndOOS | ||
| AtlantOS | ||
| SOOS | ||
| NEAR-GOOS |
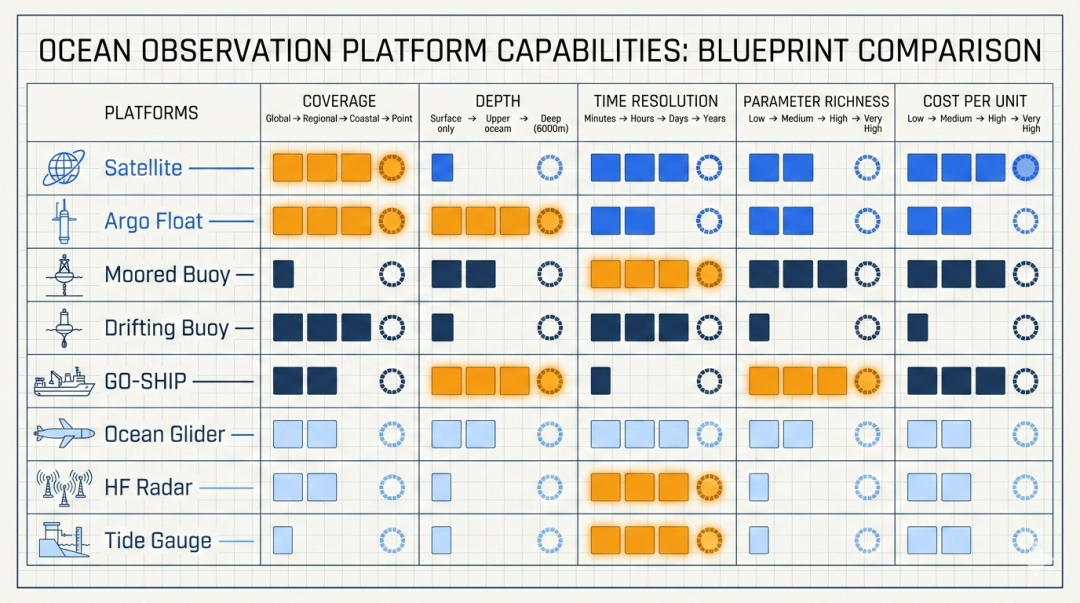
七、观测平台能力对比
| 卫星 | |||||
| Argo 浮标 | |||||
| 系泊浮标 | |||||
| 漂流浮标 | |||||
| GO-SHIP | |||||
| 滑翔机 | |||||
| HF 雷达 | |||||
| 验潮站 |
八、未来展望与挑战
已取得的成就
• Argo 彻底改变了海洋上层观测能力 • SWOT 开启了亚中尺度海洋观测新纪元 • BGC-Argo 正在填补生物地球化学观测空白 • NODD 等计划使 PB 级数据免费可用
面临的挑战
1. 覆盖不均:南大洋、北极、边缘海观测严重不足 2. 深海盲区:2,000 m 以下观测极为稀疏,Deep Argo 仅达目标的 18% 3. 生物观测缺口:12 个 BioEco EOV 的全球系统性观测尚未建立 4. 资金可持续性:高度依赖少数发达国家,长期资金保障不足 5. 数据集成:多源、多尺度、多格式数据的实时融合仍是技术难题
OneArgo 2030 愿景
到 2030 年,部署 4,700 个浮标的 OneArgo 阵列(含 Core + Deep + BGC),实现从海面到海底、从物理到生物地球化学的全方位全球海洋观测。
总结
| 顶层框架 | ||
| 剖面观测 | ||
| 表面观测 | ||
| 深海定点 | ||
| 船基调查 | ||
| 海平面 | ||
| 近岸 | ||
| 卫星 | ||
| 碳观测 |
全球海洋观测体系就像一张多层的"感知网络",卫星看全貌、浮标测剖面、船舶做精测、验潮站守海岸,每一个组件都不可替代。理解这张网络,就是理解人类认知海洋的方式。
References
• GOOS 官网 • GOOS 2025 状况报告 • Argo 计划 • OceanOPS • POGO • GO-SHIP • OceanSITES • GLOSS • DBCP • GTMBA • BGC-Argo • NOAA IOOS HF Radar • Sentinel-6 • SWOT





