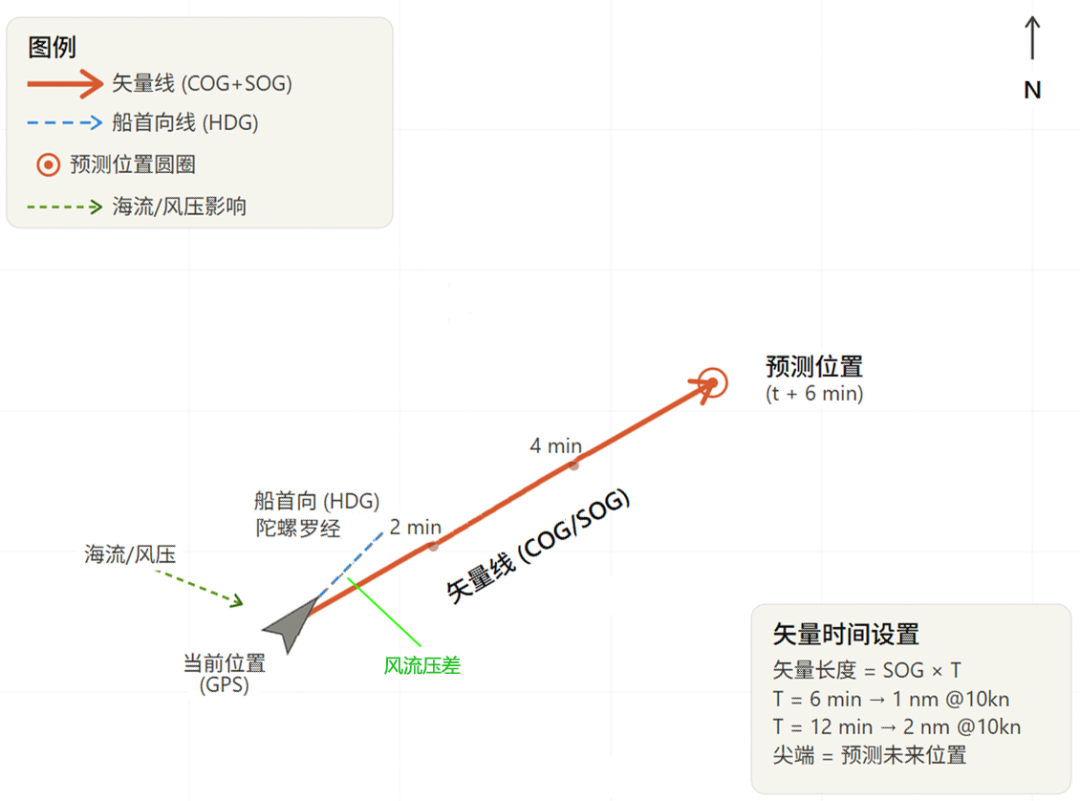
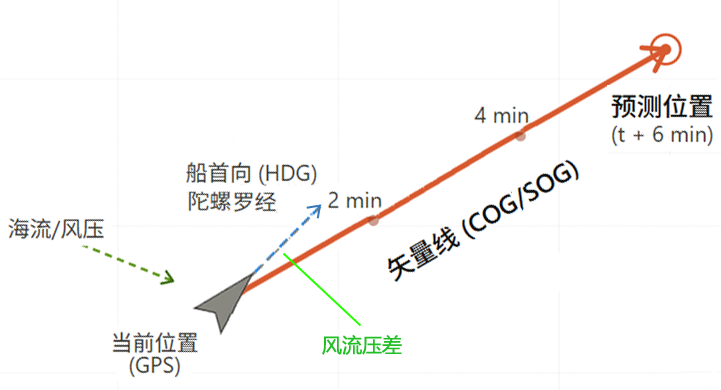
船舶在航行时,在电子海图和雷达的本船上都有一个矢量线。正是因为船员等船舶操作者司空见惯,天天用,反而可能并没有搞清楚,这个矢量线到底是什么?为此,我花了一个多小时的时间,画了一张很有价值的图,如下所示:有人可能说,这个不是太简单了吗?你图上那个橙色的线,就是矢量线,不就是代表船舶的方向吗?确实是方向,但既然是方向,为什么在矢量线的上面还能看到船位呢?方向是船首向还是航迹向?矢量里面有速度,既然是速度为啥还能表示船位?矢量线表示的意思真的是速度还是和速度有关的位移?这个位移有前提条件吗?这个箭头到底是什么意思?有什么用,怎么用?这个事情,看似简单,其实并不容易说清楚,也不容易想明白。陀螺罗经就是电罗经,电罗经显示的航向,当然是船首向,也就是上面蓝色虚线箭头表示的方向,当然是相对于真北的方向,在雷达或者ECDIS上常用HDG表示。绿色箭头的虚线表示是风流方向,对于上图那个灰色的本船来说,是左舷来风,为了简单起见,假定风流对船产生作用的方向都是同一个方向,从左舷来。灰色的本船,如果在无风无流的条件下,就会沿着HDG前行,其船首向就是航迹向。在有风有流的条件下,本船被风流压向了下风方向上,也就是说,船首虽然指向了蓝色虚线箭头的方向,但实际上船舶重心走过的航向是橙色实线箭头指示的方向,也就是航迹向。那么,在船首向和航迹向之间的夹角,就是大名鼎鼎的风流压差,就是图上绿色实线指示的那个角度。因此,这个问题最容易搞清楚:蓝色虚线箭头的方向代表船首向,橙色实线箭头的方向代表航迹向,两个方向线之间的夹角就是风流压差。究其根本,这个船首向也好,航迹向也好,表示的都是方向,用航海学的规矩,两者有大小,也就是有具体数值的,其大小就是两者相对于真北的方向角。例如,可以说上图中的船首向为055,航迹向是075,那么风流压差就是+20°,箭头表示方向,带箭头的射线自然就是方向线。但需要注意的是,船首向是由电罗经给出来的,本质上就是一个方向,而方向本身并不一定代表着速度。有人说,船首向有大小例如030,070,090,180等等,也有方向箭头,那么船首向是不是矢量?因为数学里面的矢量和航海里面的不是一回事。在数学里面,矢量就是既有大小又有方向的量,船首向只是一个方向,只是构成矢量其中的一个条件,单单一个方向不构成矢量。船首向的那些角度是相对于真北这个基准的角度,并不是船首向这个方向本身自带的数值。数学里面的矢量指的是这一个物理量有方向,用箭头表示,用箭头所在的线段长度表示这个物理量的大小,你不能用箭头所在直线的相对方位角表示这个物理量的大小,这才是本质上的区别。在数学和物理上,两个有方向没有大小的射线如何做平行四边形法则,如何计算?根本没办法计算。从本质上说,船首向和航迹向就是两个方向,在各自的方向上没有大小,其所谓的大小只是相对于真北这个参照物的大小,而非本身大小,所以两者都不是数学和物理上说的矢量。之所以有时候称这两个方向为矢量,其实指的就是方向,是一种不严格的说法,在数学上和物理上都是不成立的。要注意,ECDIS上这两个方向不要和ARPA里面做舰操图的自始返航向终连搞混了。舰操图上带箭头的线段确实是速度矢量,与本文所讲的完全不是一个意思。那问题又出现了,既然船首向,航迹向都只是方向不是矢量,那么,电子海图和雷达上的矢量线是什么,既然不是矢量,为什么叫矢量线?以电子海图为例,ECDIS上这个橙色箭头,确实被称为矢量线,英文是vector. 从上面的分析可以知道,这根橙色实线箭头的方向代表航迹向,就是一个方向,这本身没有任何问题,这肯定是对的。但是航海上为了方便,就想着,能不能在这个航迹向上,表示出未来几分钟的船位呢?这个想法一点也不新奇,学过航海的都知道,其实这正是海图作业的根本思想。这根橙色的矢量线,实际上是根据航海上的需要做了一下技术处理,完全是航海专业自己的一个技术问题。你在ECDIS上找到矢量线设置那个对话框或者界面,输入6min,点击确定或者应用按钮。ECDIS马上就收到了你输入的数值,从编程的角度上来说,这个6min作为一个数值就赋给了ECDIS系统中vector_time这个成员变量。当前,这个vector_time成员变量对应的数值就是6min.船上的GPS,实时测得船舶当前时刻准确的对地航向和对地航速,也就是长说的在真矢量(True Vector)模式下的COG和SOG,这两个数是船舶这个质点相对于地球的实际航向和航速,也就是风流压差影响后船舶质点实际的航向和航速。于是,在ECDIS系统中,这个SOG这个对地速度是一个具体的数值,它会与刚才设置好的那个vector_time相乘,也就是SOG×vector_time/60,那么,这个乘积的结果代表的意思就是,如果船舶以当前的SOG和COG走,且风流压差等其他数据都不改变,6min后的船位就算出来了。方向就是COG,航程就是SOG×vector_time/60,从本船当前位置沿着COG这个方向画SOG×vector_time/60这么长的一条线段,就是6min矢量线。该线段表示当前位置到预测位置之间的位移矢量。因为这条线既有方向又在这个方向上有大小,所以这条线当然是矢量,所以在航海上就称之为矢量线了。在ECDIS操作上怎么用?
1. 设置矢量时间
在菜单中找到 Vector Time(矢量时间),设为 6 min(近距离避碰)或更长。改变这个值,矢量线长度立即变化,但方向不变。
2. 切换矢量模式
多数 ECDIS 可选 True Vector(真矢量,相对海底/地面)或 Relative Vector(相对矢量,相对水面)。
True Vector(COG/SOG)用于避让固定障碍物,看矢量尖端会不会碰礁石。Relative Vector两船的矢量尖端如果重合,代表有碰撞风险——本质上是在做CPA计算。3. 避碰判断
在密集航区,把矢量时间设为 6 分钟,看本船矢量尖端与他船矢量尖端是否存在危险接近,这比肉眼估算方位压低直观得多。
4. 尖端圆圈的含义
部分ECDIS在矢量尖端会画一个小圆圈,表示该位置存在定位误差范围。圆圈越大,预测位置置信度越低。
微海事公众号
微海事提供计算服务
 海上货物运输
海上货物运输 船舶货运基础
船舶货运基础微海事原创软件产品
 杂货船配载系统中文版
杂货船配载系统中文版
 杂货船配载系统英文版
杂货船配载系统英文版
 港外浅点潮汐计算软件下载链接
港外浅点潮汐计算软件下载链接
通过网盘分享的文件:tidecalbyliyong.rar
链接: https://pan.baidu.com/s/1gGuAioTuZvtsJ7bUHmPq3g?pwd=LIYG 提取码: LIYG
微海事原创精品视频课程
 散粮船稳性核算从理论到实务
散粮船稳性核算从理论到实务
 ECDIS大证评估考试详解
ECDIS大证评估考试详解
 手把手教你考货运
手把手教你考货运
 配载成手
配载成手
 水尺检量从理论到实务
水尺检量从理论到实务
 船舶超载计算与实务
船舶超载计算与实务
 海运危险品隔离技术
海运危险品隔离技术
 油船油量计算技术
油船油量计算技术
 船舶完整稳性计算技术
船舶完整稳性计算技术
 船舶破舱稳性计算实务
船舶破舱稳性计算实务
 船舶浮态计算实务
船舶浮态计算实务
 船舶强度计算实务
船舶强度计算实务
📱 李老师手机微信13697601072
 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库