 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库KASS自主导航系统风险评估结果分析

随着海上自主水面船舶技术的快速发展,确保其安全性已成为国际海事领域的核心议题。作为韩国MASS研发项目的一部分,KASS自主导航系统计划于2024年9月在1800TEU集装箱船上进行实地测试。为确保测试及未来运营的安全,项目方对该系统进行了全面的风险评估。
本文基于提交给国际海事组织的提案,对KASS自主导航系统的风险评估过程、主要发现及结果进行分析,探讨其为MASS安全认证提供的实践参考。
国际海事组织多次强调,安全是自主航行船舶发展的重中之重,并确立了风险评估作为MASS认证过程基础的关键原则。鉴于MASS技术相较于传统船舶的复杂性和多样性,以及在商业部署方面的有限经验,在系统实际投入运营前进行彻底的安全性审查至关重要。韩国在其MASS研发项目框架下开发的KASS自主导航系统,正是遵循这一原则,通过系统的风险评估来识别潜在风险并制定改进措施,旨在提升自主导航技术的安全性与可靠性。
本次风险评估采用了危险识别研究这一系统化的方法。其核心目标是在系统设计概念开发和初始设计阶段,识别在MASS或自主系统操作中可能对人命、环境和资产造成损害的潜在风险因素,并寻求将风险降至可接受水平的措施。研究的目标系统是安装在1800 TEU集装箱船上的KASS自主导航系统。
为了清晰理解系统的操作概念和范围,研究首先将复杂的导航功能分解为五个核心子功能:A1航次计划功能,A2船位测定功能,A3态势感知功能,A4 风险规避计划与决策功能,A5船舶控制功能。
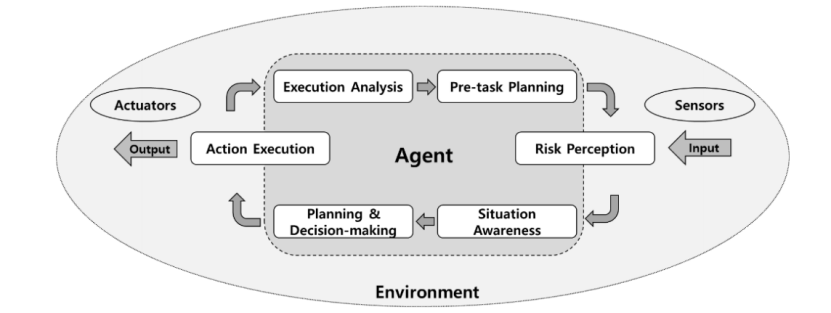
在此基础上,研究运用功能分析方法,深入剖析KASS系统各子功能及其与内部子系统、外部连接系统的交互作用。随后,基于认知模型,研究进一步分析了当系统功能因输入信息错误、智能体故障、功能本身降级或输出信息错误等原因而丧失或降级时,可能引发的危险场景。整个HAZID研究以多领域专家团队的头脑风暴研讨会形式进行,确保了分析的全面性与专业性。
通过HAZID研讨会,针对KASS自主导航系统的当前设计和操作方案,共识别出23个危险场景。按风险类型分类,其中19个与人员风险相关,23个与资产风险相关。这些危险场景覆盖了从航次计划到船舶控制的各个环节。作为应对,研讨会共提出了53条具体建议,其中针对航次计划功能的建议最多,表明前期规划阶段的风险点较为集中。
以下列举部分关键风险领域及其对应的典型建议:
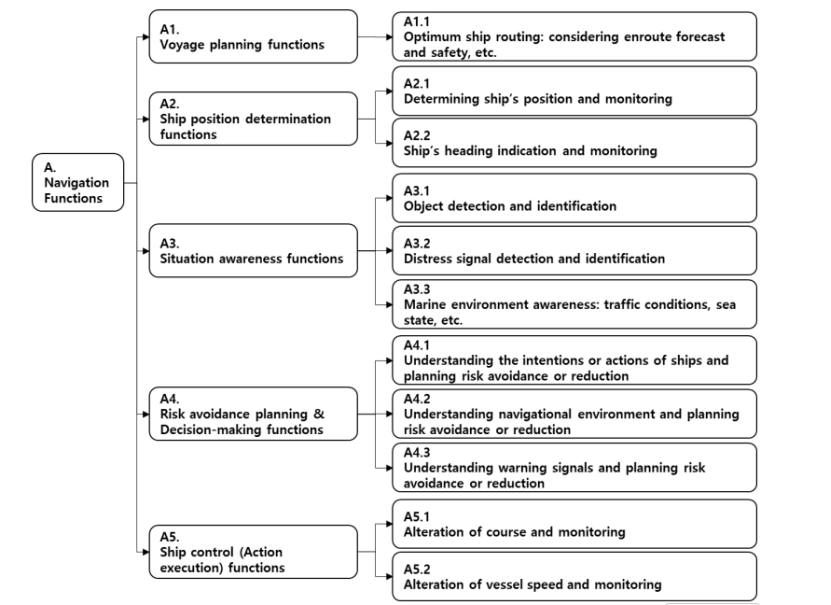
A1航次计划功能:主要风险包括操作人员对系统误解、未经授权使用、数据传输错误、连接故障等。典型建议:制定详尽的操作手册,明确系统使用条件、控制权转移程序;提供数据完整性检查功能;明确系统在离岸距离、天气条件等方面的操作设计域;在设备上粘贴标签,区分研究设备与法定设备。
A2船位测定功能:主要风险GPS 故障/失灵/连接失败,船位信息错误。典型建议:即使在使用KASS自主导航系统时,也应始终保持由持证驾驶员进行正规驾驶台值班,以便在任何情况允许时频繁核对船位;制定值班驾驶员在KASS自主导航系统和值班驾驶员之间转移控制权的操作程序;制定主要设备故障的应急响应程序,并设定视觉和听觉报警功能,以使值班驾驶员意识到KASS自主导航系统控制模式的控制权被解除的情况。
A3态势感知功能: 风险集中在传感器受环境影响、目标识别失败尤其是在复杂或能见度低的情况下,以及同时应对多个目标的能力。典型建议:提供传感器安装和维护指南;明确操作设计域;设定最小安全距离边界,并规定当目标船进入该边界或出现多艘目标船时,系统应报警并将控制权交还值班驾驶员。此类场景的风险指数评分较高,反映了环境感知和避碰决策是自主导航系统最大的挑战之一。
A4风险规避计划与决策功能:核心风险是系统的避碰决策可能不符合《国际海上避碰规则》,无论是在本船为“让路船”还是“直航船”的局面下。典型建议:提供功能使值班驾驶员能提前预览系统规划的避碰路线;规定操作员应通过VHF通信与其他船舶沟通,告知本船正在使用自主系统;严格限制系统的操作设计域。
A5船舶控制功能:风险包括系统控制突然解除以及值班驾驶员疲劳或注意力不集中。典型建议:明确控制超越策略;规定控制权转移必须由驾驶员手动执行;限制实地测试时长以避开交接班时间;为驾驶员和研究人员提供充分培训。
KASS自主导航系统的风险评估结果清晰地表明,尽管系统具备高度的自动化能力,但人的因素在保障安全中仍然扮演着不可替代的角色。绝大多数建议都围绕着明确人机交互界面、规范操作程序、强化人员培训和设定严格的操作边界。这印证了当前阶段MASS发展的一个核心原则:自主系统是驾驶员的辅助工具,而非替代者。
此外,风险分析揭示了一下以下几个关键的技术和操作挑战:
人机交互的明确性:需要清晰界定何时由系统控制、何时由人控制,以及控制权如何平稳、安全地交接。
环境感知的局限性:传感器在恶劣天气、夜间或面对特殊目标时的性能限制,是导致高风险场景的主要诱因。
决策算法的合规性:确保系统的避碰决策在任何时候都严格符合《国际海上避碰规则》,是一个巨大的技术挑战,尤其是在复杂的会遇局面中。
操作边界的设定:通过定义明确的ODD条件,将系统的应用限制在其能力得到验证的范围内,是重要的安全保障措施。
总之,对KASS自主导航系统进行的风险评估不仅为该系统后续的实地测试和设计改进提供了直接指导,也通过识别出23个危险场景并提出53条建议,为整个航运业界进行自主导航系统的风险评估提供了宝贵的实践案例。它再次确认了将风险评估作为安全认证基础的原则,并强调了在追求技术创新的同时,必须通过严谨、系统的分析来确保安全这一首要目标。






