 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库海洋论坛▏水下高速仿生机器鱼的研究进展与分析

一、引言
海洋蕴含着丰富的矿产资源和生物资源,随着陆地资源的逐渐枯竭,如何实现海洋资源的安全高效开发已成为全球关注的热点问题。在此需求驱动下,遥控式水下机器人(ROV)、自主式水下机器人(AUV)等水下航行器应运而生。水下航行器可用于水下侦察与情报收集、布雷与扫雷、潜艇协同与反潜作战等军事任务,也可以进行资源勘探、海洋生物观测、深海基础设施检修及水下考古与沉船打捞等。然而此类传统的水下航行器普遍存在体积庞大、机动性能受限等不足,特别是采用螺旋桨推进器时会产生显著的水流扰动现象,这不仅造成能源利用率下降,还直接影响到整体作业效能。不仅如此,研究人员发现螺旋桨撞击会带来许多负面影响,如产生更多的海洋垃圾,提高海洋生物的死亡率,导致浅水生态系统的紊乱等。此外,螺旋桨产生的宽带噪声也对海洋动物有着严重的声学危害。
经过自然界的不断淘汰和筛选,高速游泳鱼类能在复杂的涡流中通过振荡运动来实现高效率推进、超机动性、低噪音和对流场的轻微干扰。其中,蓝枪鱼的最大速度为2.25m/s;短鳍灰鲭鲨的最大爆发速度为5.02m/s,近10kn;一项关于旗鱼捕获成群沙丁鱼的研究报告称其速度上限为8.19m/s;一些大型肉食性鱼,如旗鱼和黑枪鱼的游泳速度甚至能超过30m/s。不仅如此,鱼类还可以通过与周围流体的相互作用来达到减阻的目的,与传统的自主水下航行器相比,其各方面的优势都十分显著。因此,了解鱼类的形态和游泳行为,模仿鱼类的游动推进模式并将这些原理应用到机器鱼的设计中,现已成为各国研究人员追求的目标。自1926年BREDER开始对鱼类的游动机理研究以来,各类仿生机器鱼的理论和实验研究已渐显规模。国内相关研究团队也已提出了具备鱼跃能力的高速仿生鱼设计方案,其最大游速可达2.2m/s,显著优于传统仿生设计。而南方科技大学研制的BigBay仿生鱼模型在实地测试中打破了“机器鱼50m最快游泳”的世界纪录,实现2.83m/s的高速游动。在工程应用方面,李洁雯等开发的仿生机器人系统已成功应用于海上风电场水下桩基腐蚀监测,标志着仿生机器鱼的应用正逐步向水下巡检、长期巡航等实际工程领域拓展。然而,现有机器鱼的工作频率通常低于3Hz,游速基本为0.5m/s~1m/s。少数能够实现高频率的系统仍局限于低速。因此,针对鱼类如何实现高速游动的科学问题,通过借鉴高速鱼类的自然构造、表征特性及行为特点来构建高速仿生机器鱼模型是目前研究的空白。
二、高速仿生机器鱼设计原理
⒈鱼类游动机理研究
⑴生物力学基础
从生物学特征方面看,能实现高速运动的鱼类有许多与提高游泳性能有关的适应特征,包括高度流线型的身体、较细的尾柄、较高的核心温度、排列紧密的白肌(快肌)纤维及主要由新月形尾鳍的横向运动而非身体起伏提供的动力等。
流线型身体可以减少整体阻力。鱼类的体型可以通过体细度比来有效地区分,体细度比是指鱼的长度与其横截面直径的比值。基于传统阻力模型,流线型的最佳体细度比被认为是4.5左右,尽管WALKER等最近的一项分析表明,体细度大于4时对游泳表现的影响都不大。
而鱼体尾柄处的变窄意味着梭形身体能节约尾流释放出的能量。部分高速鱼类的尾柄处还具有坚硬隆起的结构,可以加强肌肉的附着,强化尾柄强度,以防高速游动时尾鳍因剧烈摆动而折断。虽然尾鳍的内部结构及结构力学特性不尽相同,但新月形或叉形尾鳍可以通过前缘吸力而产生较大的推力,流线型体型和新月形尾部往往会使推力最大化,并最大限度地减少阻力和反冲能量损失,如金枪鱼、鲸、海豚等。
还有许多鱼类的鳞片结构对水中减阻起到了重要作用。一些鲹科鱼类,如蓝圆鲹、珍鲹等在躯干的后半段拥有特化的侧线鳞,这些粗厚的鳞片向侧面突起,能有效地破开水体;鼠鲨科的灰鲭鲨皮肤上有微小的齿状鳞片(盾鳞),在其游动过程中,竖起的齿状体可以屏蔽产生阻力的漩涡,从而显著减少水的阻力,提高游动速度。也有研究表明,自然界中的鱼类往往表现出高度协调的群体运动,集群运动中相邻鱼类之间身体运动的相位匹配可以帮助鱼群内的单个鱼类增加推力或减少阻力,同时降低能量消耗。鱼类还通过鱼体表面分泌的黏液物质或从体表传导的热量来降低身体周围的水黏度,从而减少阻力。另有研究发现,海洋中游速很快的水生生物,如虎鲸、海豚等,它们的身体顶部呈深色,底部呈白色。海洋生物身体顶部的黑色在减少皮肤阻力方面非常有效。
金枪鱼作为典型的高速鱼其体内具有特殊的血管分布,即在其肌肉和内脏器官之间存在一套特殊的网状血管,这套蓄热结构称为逆流热交换器。它可以使鱼体产生的热量不被水流带走,促进骨骼、眼睛和大脑这些高需氧组织的温度升高,从而加速糖类的分解以快速地产生能量,作用于神经系统,使其具有爆发性的速度。以速度著称的剑鱼、旗鱼和枪鱼的头部也具备这样的逆流热交换结构,可以使其眼睛和大脑的局部温度升高以保持敏锐的视觉和迅猛的游速。
⑵鱼类推进模式分类
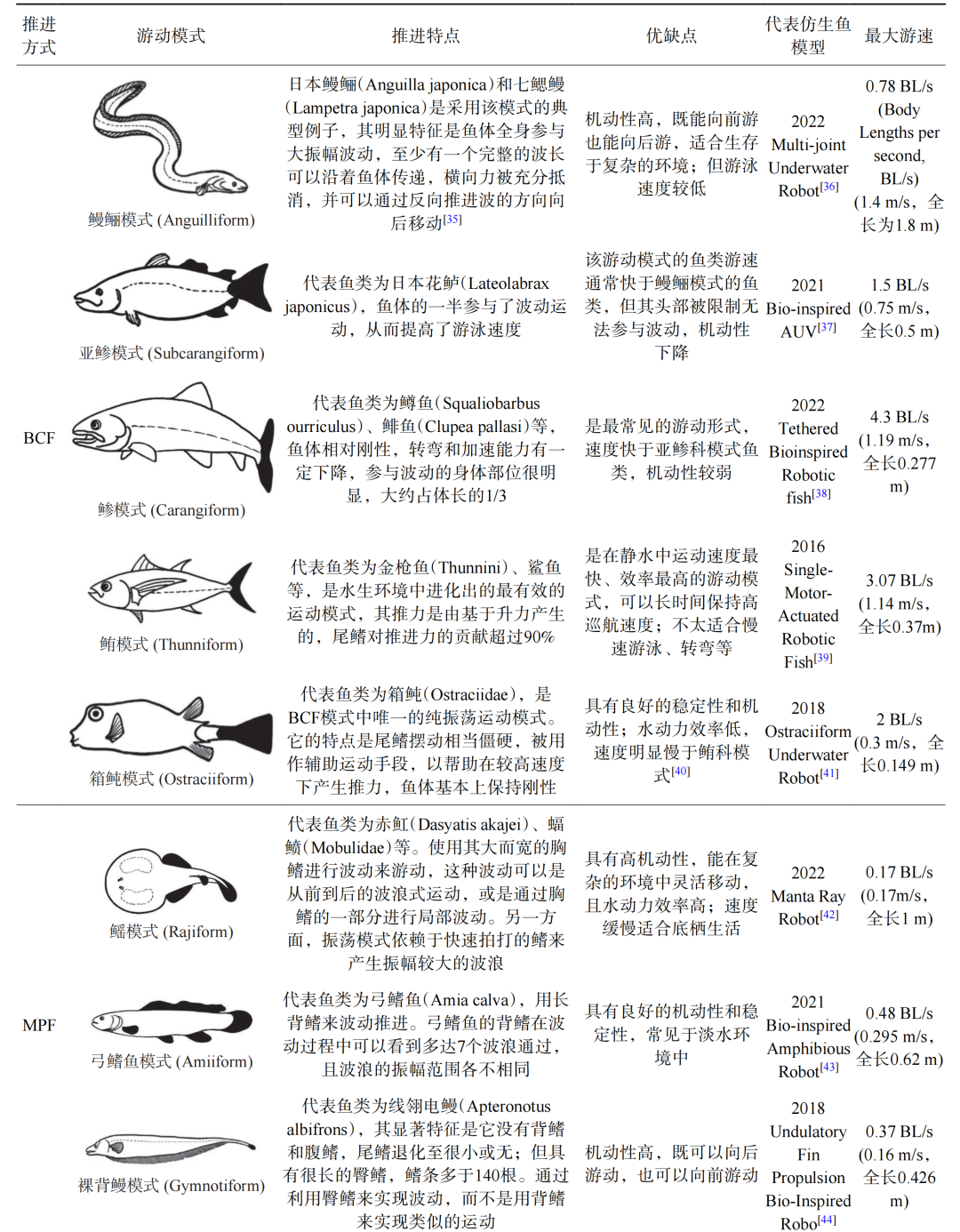
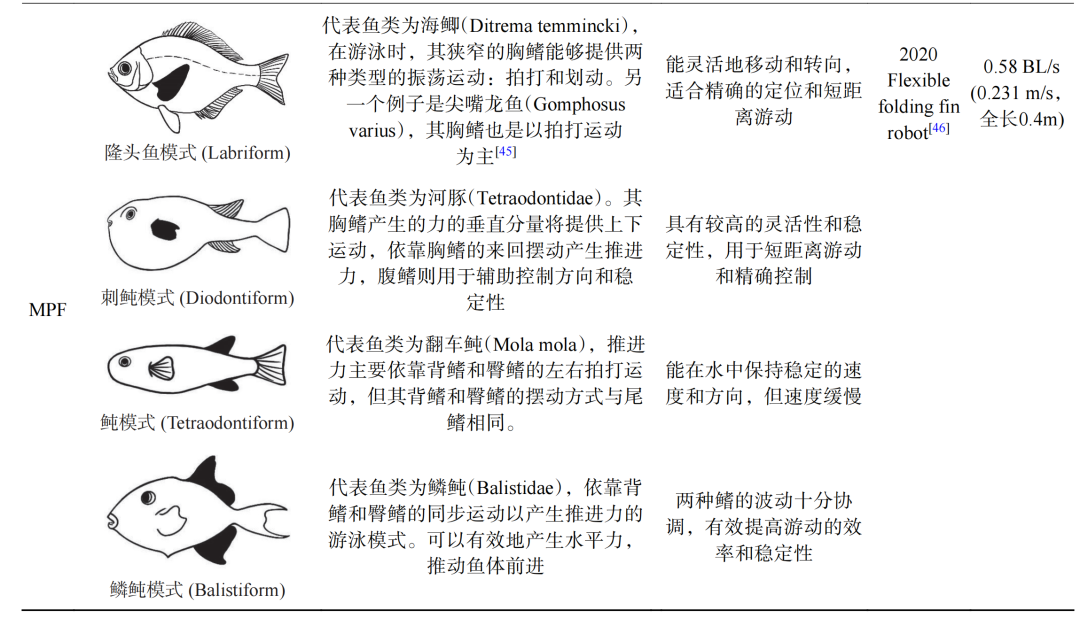
LINDSEY和WEBB基于鱼类游动时驱动部位的差异,将其推进方式划分为两大基本模式:身体/尾鳍推进模式(BCF)和中间鳍/偶鳍模式(MPF)。BCF和MPF模式又都可以分为两种运动类型:波动或振荡。此外,也可以根据推进部分的不同,划分为更细致的分类。BCF模式通过鱼体特定区段的波动与尾鳍的协调运动,与流体作用产生向后传播的推进波,可以进一步细分为5个游动模式:鳗鲡模式、亚鲹模式、鲹模式、鲔模式和箱鲀模式。MPF推进模式的鱼类则是通过身体中部的鳍来产生推力,可以细分为7个游动模式:鳐模式、刺鲀模式、弓鳍鱼模式、裸背鳗模式、鳞鲀模式、隆头鱼模式和鲀模式。鱼类不同游泳模式的详细分类及特征如表1所示。
如前所述,不同的游泳模式使用不同的鳍,所表现出的游速和机动性也各不相同。约85%的鱼类采用BCF模式,就效率而言,可以看出BCF中鲔科的运动模式堪称游泳进化的顶峰。与BCF推进方式相比,MPF方式更为敏捷但在提速方面稍显逊色。在仿生机器鱼的发展中,高速和高效率一直是关键指标。因此,现有的仿生机器鱼大多采用BCF作为产生推力的方式。
⒉仿生鱼游动机理研究
⑴流体动力学优化
进入21世纪后,高性能计算技术迅速发展,仿真软件和流体力学软件用于运动学和动力学分析,基于粘性流体的CFD方法逐渐成为仿生水动力学数值手段的主流选择。在仿生流体力学领域,RANS方程被广泛应用于摆动尾鳍的涡动力学分析。CFD仿真则成为研究仿生AUV水动力性能的主流方法,包括稳态/非稳态流场模拟、自主推进模型的水动力参数优化及运动控制策略验证。近年来研究呈现两大趋势:一方面,研究通过CFD技术拓展机器鱼的工程实用性,如环境感知与避障功能开发。另一方面,将数据驱动方法与CFD结合,构建多目标协同优化框架,推动仿生机械鱼设计向智能化发展。CFD技术能够精确预测和模拟流体流动行为,在优化仿生水下航行器的结构设计方面发挥着至关重要的作用,可以显著增强其流体动力学和运动学性能。但是,由于鱼游CFD模拟涉及巨大的计算量,且现有实验数据的精度和完备性不足以支撑,对鱼类游动过程中复杂流固耦合作用与水动力特性的认知仍存在诸多空白,全面理解这一复杂机制仍面临较大挑战。
表1 鱼类不同游泳模式的分类及特点
通过CFD模拟优化设计的仿生机器鱼形态与动力学模型,能够在理论上达到高效推进。然而,真实环境中的水动力条件复杂多变,仅模型设计不足以保证其稳定性和适应性。在实际应用中,仿生机器鱼的运动表现不仅依赖于其形态设计,还高度依赖其对环境变化的感知能力和实时调整机制。
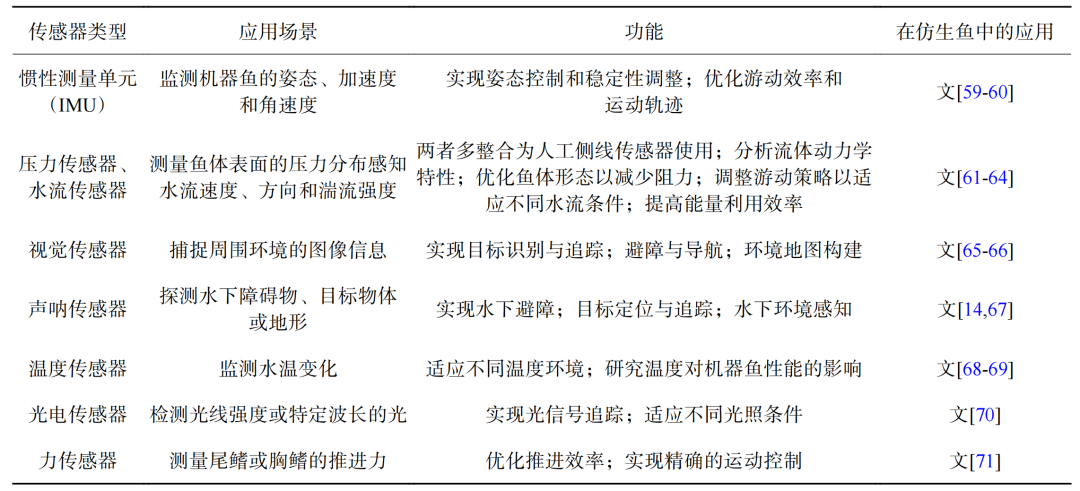
传感器的使用是仿生机器鱼实现自主游动和智能化的关键。仿生机器鱼通过传感器(如人工侧线、压力传感器、温度传感器、流速计等)实时感知周围环境中的水流变化、压力梯度及障碍物分布,能够动态响应外界刺激,模拟鱼类在复杂水域中的灵敏导航能力并根据环境信息作出决策。如表2所示,各类传感器具有不同的生物感觉功能;表3进一步归纳了不同传感器在仿生机器鱼中的功能应用。通过摄像头、声呐等传感器,机械鱼可以感知移动目标的位置、速度和运动轨迹,模拟真实鱼类对猎物或伙伴的追踪行为。同时,结合算法模型,仿生机器鱼能够在多目标环境中做出行为选择,优先追逐特定目标或避开潜在威胁,展现出一定的智能决策能力。借助传感器网络和通信模块,机械鱼能够感知同伴的位置、运动状态和行为意图,从而实现群体内的动态信息共享与协同行动,使其在执行复杂任务(如大面积环境监测、搜救等)时展现出自组织特性,如编队游动、队形变化和任务分工等。
⑵仿生鱼运动控制
仿生机器鱼在推进机制、驱动架构、动力学模型、控制对象及感知方式等关键要素上与传统水下机器人存在着本质差异。这些差异性特征对运动控制系统的架构设计、性能优化及算法选择均产生重要影响。因此,如何设计高效、稳定的控制策略以精准调节推进模式、优化运动性能,成为仿生机器鱼研究的关键问题。
表2 传感器的生物感觉功能
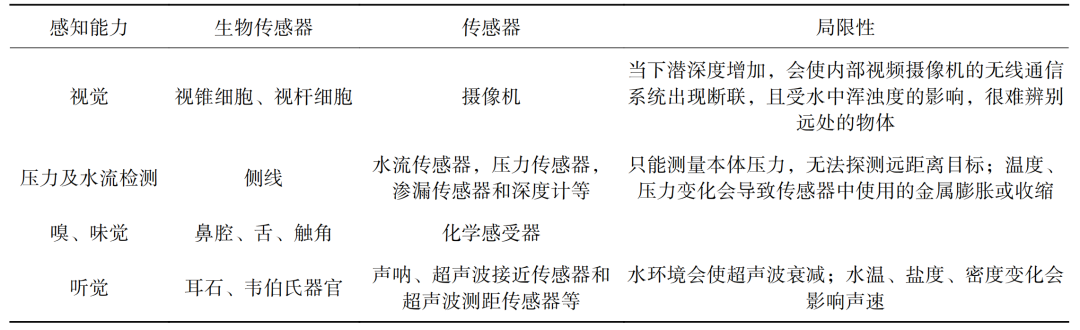
表3 不同传感器在仿生机器鱼上的应用及其功能
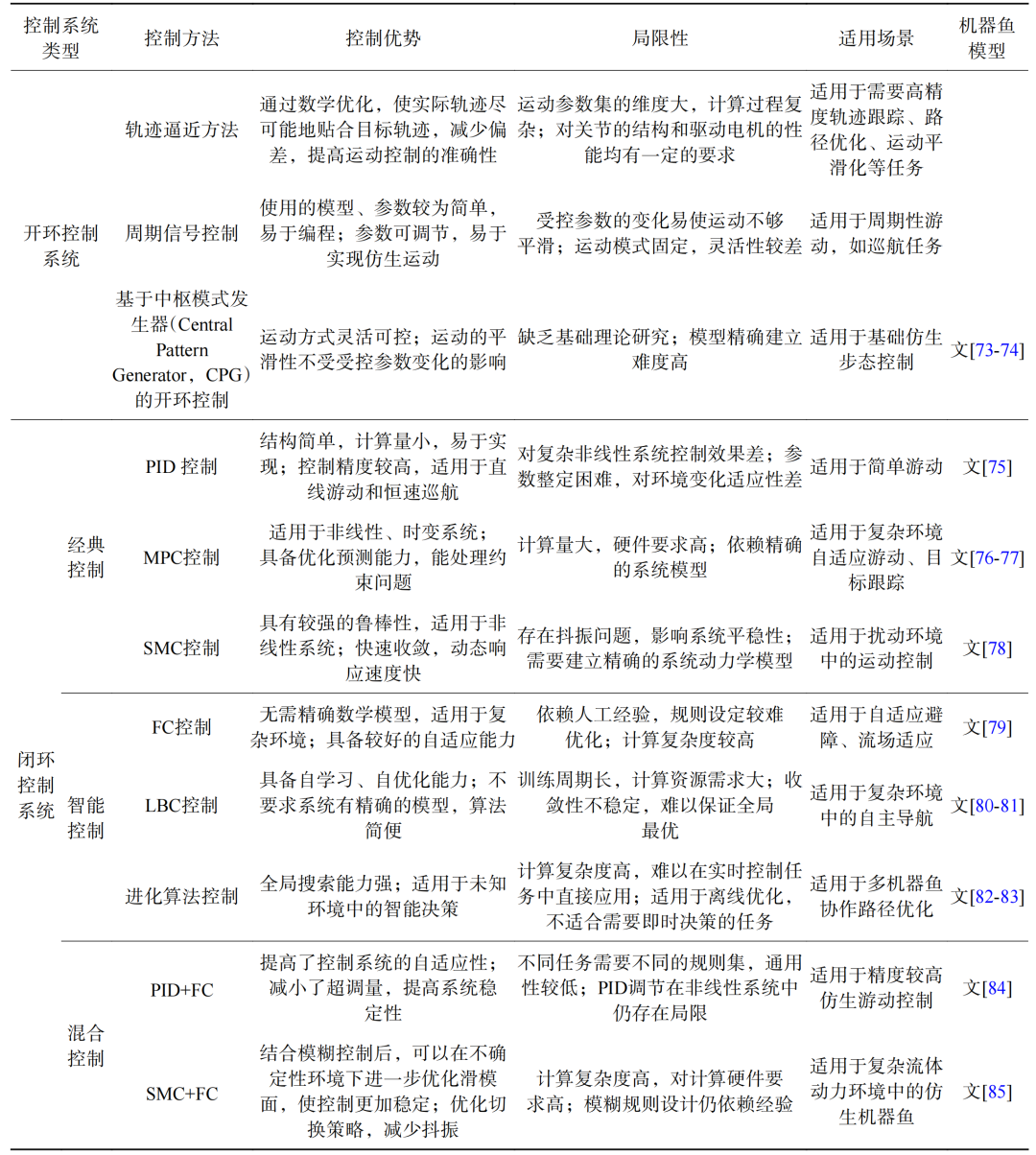
根据控制系统的反馈方式,仿生机器鱼的运动控制系统可分为开环控制系统和闭环控制系统。开环控制系统通常依赖预设的运动模式或周期信号,实现仿生游动的基本控制,具有计算量小、实现简单的优势,但缺乏对外部环境变化的自适应能力。闭环控制系统则通过实时反馈调整运动参数,提高系统的稳定性和环境适应性,包括比例-积分—微分控制(PID)、模型预测控制(MPC)和滑模控制(SMC)等经典控制方法,以及模糊控制(FC)、基于学习的控制(LBC)方法等智能控制方法。这两类控制系统在控制精度、实时性、环境适应性、计算复杂度等方面各具特点,因而针对不同应用场景具有不同的适用性,如表4所示。
三、高速仿生机器鱼样机研制现状
⒈生物仿生模型选择的多样性
仿生机器鱼的设计大多以自然界的鱼类或海洋生物为仿生模型,旨在通过模仿这些生物的游泳机制来提升推进效率和机动性。麻省理工学院(MIT)是这一领域的先驱,其著名的RoboTuna(图1)项目由David Barrett团队启动,以蓝鳍金枪鱼为生物模型,实现了高达91%的推进效率和1.67BL/s(2.1m/s)的直线巡航速度,是现代首款功能完备的仿生鱼。
随后,该团队又同美国Draper实验室联合研发了“VCUUV”(图2)仿生黄鳍金枪鱼,在RoboTuna的基础上提高了推进效 率和机动性并具有稳定的转向和深度保持能力,在1Hz的摆尾频率下,最高可达到0.5BL/s(1.25m/s)的游速和75.8°/s的转向速率;而当频率超出1Hz时,其产生的力会大于预期,尾部控制性能大大下降。
表4 仿生机器鱼运动控制系统的分类及应用
弗吉尼亚大学朱建忠团队提出Tuna Robotics项目,以黄鳍金枪鱼和大西洋鲭鱼为Tunabot(图3)外观设计的灵感来源。其设计只保留了由高刚度聚合物制成的尾鳍,体表附有弹性皮肤以最大限度地减少驱动过程中的屈曲;通过高频尾摆技术,其摆尾频率可达15Hz,最大游动速度约为4BL/s(1m/s)。

图1 仿生机器鱼RoboTuna
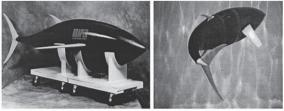
图2 仿生机器鱼VCUUV
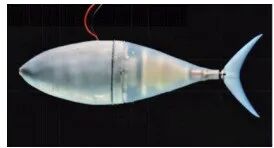
图3 仿生机器鱼Tunabot
北京航空航天大学研发了国内首款采用波动推进机制的仿生机器鱼,该机器鱼通过模拟鳗鲡的波动运动和尾鳍的摆动,最高游速达到0.75BL/s(0.6m/s)。日本东京工业大学、伊斯坦布尔科技大学和北京大学喻俊志团队分别以海豚为仿生对象开发了两关节机器海豚(图4)、仿生海豚Rodo-2(图5)和能执行重复跳跃动作的仿生机器海豚(图6),其推进最大速度分别达到0.69BL/s(1.2m/s)、0.5BL/s(1m/s)和2.93BL/s(2.11m/s)。
北京航空航天大学的王田苗团队以鲔科鱼类为模型,设计优化了仿生机器鱼SPC-3UUV(图7),研究表明采用模糊逻辑控制方法对斯特劳哈尔数(St)进行主动调控,当St控制在0.4~0.5时,推进效率得到显著优化,可降低机器鱼功耗并提升游速,实现最大速度1.87m/s。
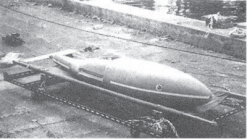
图4 仿生两关节机器海豚
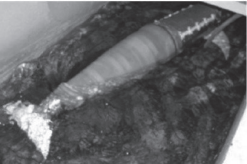
图5 仿生三关节机器海豚Rodo-2
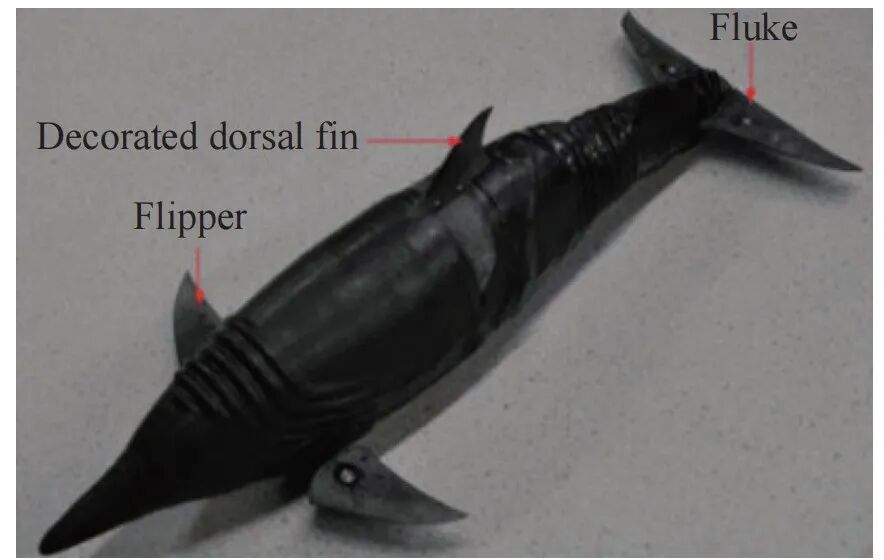
图6 仿生机器海豚

图7 仿生机器鱼SPC-3UUV
英国科尔切斯特埃塞克斯大学的Clapham团队开发了iSplash-I(图8)项目,该机器鱼以鲤鱼为模仿类群,实现了最大速度3.4BL/s(0.88m/s),并在6.6Hz下保持2.8BL/s(0.7m/s)的稳定游泳速度。后续又在一代的基础上研发了以鲹科鱼类为模型的iSplash-II(图9),该模型使用了0.6kg的大电动机(占总质量的75%),这样集中质量的设计有效地减少了后坐力,有助于后部稳定性的提高,并获得较大的振幅和推力。此外,可通过实验调整鱼体后部链接的组成,以实现各种频率下的游动。该机器鱼通过一个峰值功率为120W的电机以20Hz驱动尾鳍,其稳定直线速度可高达11.6BL/s(3.7m/s),并能在最大速度下保持耐力约10min,成为目前游速最快的仿生机器鱼。然而,由于结构设计的限制,iSplash-II并不能实现转向。
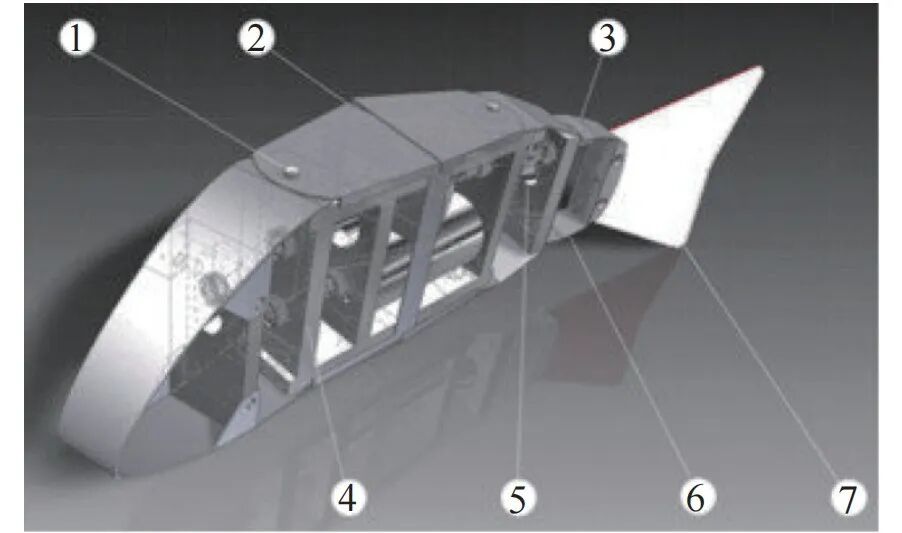
图8 仿生机器鱼iSplash-I
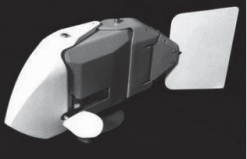
图9 仿生机器鱼iSplash-II
⒉续航能力与动力系统的改进
仿生机器鱼项目普遍采用高效能耗的伺服电机与长续航电池组,以确保机器鱼能够在长时间内进行自主作业。Tunabot的研究显示,一个10Wh的电池组可支持机器鱼游泳4.2km。哈尔滨工程大学研制的“仿生-I”号(图10)水下仿生机器鱼采用双伺服电机驱动系统,两台电机分别独立调控胸鳍和尾鳍的运动,具备10m左右的下潜深度和70kg的负载能力,最高航速达到0.5BL/s(1.2m/s)。
而南方科技大学王峥教授团队的BigBay机器鱼(图11)配备150W的驱动电机和多种传感器,基于智能算法来获取自身实时姿态信息并以单向持续高速转动加轭式机械结构来实时调整3自由度的摆尾换向,可以在50m长泳池内保持稳姿态并以平均4kn(约2.26m/s)、瞬时5kn(2.83m/s)的高速完成游泳任务。

图10 机器鱼仿生-I号

图11 仿生机器鱼BigBay
韩国建国大学的研究人员开发了一款能够完成快速游泳和跳水运动的仿生机器鱼KUFish(图12),它采用小型高效的直流电机,额定转速可达12000转/分,配合减速比14.4的齿轮系统,由4块锂聚合物电池供电(150mAh,3.7V),以确保机器鱼在水下有足够的能量驱动高频尾摆。在其释放后的0.68s瞬间可达到最大6.1BL/s(1.35m/s)的速度跃出水面。
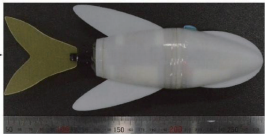
图12 仿生机器鱼KUFish
这些续航能力与动力系统的改进,不仅提升了仿生机器鱼的实际操作性能,还降低了其在长时间复杂任务中的能耗,为大规模推广提供了技术保障。
⒊智能材料驱动系统的创新
电机和螺旋桨驱动普遍存在噪音大、效率低(通常低于40%)的问题。近年来,驱动材料不再局限于传统的电动机或液压驱动,更多具有低噪声、高效率、高柔韧性的新型功能材料被应用于仿生机器鱼的制作,如离子聚合物-金属复合材料(IPMC)、形状记忆合金(SMA)、压电材料(PZT)等。这类以智能材料制成的新型机器鱼体型都较为微小,功率和精度无法与电机相提并论,在游动速度方面远低于用电机驱动的机器鱼,但在高变形性和适应性方面具有独特的优势。
日本早稻田大学的研究人员开发了一种仿生机器鱼(图13),其软尾内部缝有两组SMA导线,通过提供电流使SMA线产生热量收缩,尾鳍向两侧弯曲,实现与真鱼相似的BCF推进模式。机器鱼能在3种不同频率(1Hz、2.25Hz和3Hz)下保持恒定的速度和稳定的游泳状态,并在2.25Hz下达到最快的游泳速度0.46BL/s(0.069m/s)。
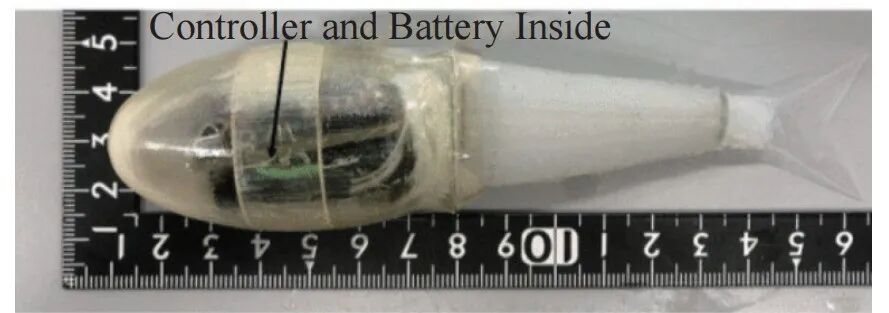
图13 SMA微型机器鱼
北方工业大学开发了由PZT材料驱动的双尾鳍微型仿生机器鱼(图14)。其尾鳍由基于PZT薄膜的压电双晶片悬臂通过四杆联动实现闭合或打开运动,在130V、4Hz下测得的微型机器鱼的最大速度约0.75BL/s(0.045m/s),整体效率η约为1.69%,远大于已报道的由IPMC驱动的机器鱼(η约为6.3×10−6%)、SMA(η约为0.7%)和压电纤维复合材料(η约为1.35%)。
⒋仿生关节与推进机制的优化
仿生机器鱼的推进机制通常通过多关节驱动系统实现,以模拟鱼类摆尾或波动运动,从而有效增强机器鱼的推进速度。韩国产业技术研究所开发的机器鱼“ICHTHUS V5.7”(图15)有一个用于推进的3-DOF串行链接结构和用于其胸鳍的上下运动的1-DOF串行链接结构;每个关节上的伺服电机直接连接到机器鱼的主体框架,通过使用伺服电机,能够控制机器鱼的频率、相位差和振幅,以改变其推进力。在实证测试中,该机器鱼游速达到4 BL/s(2m/s)。
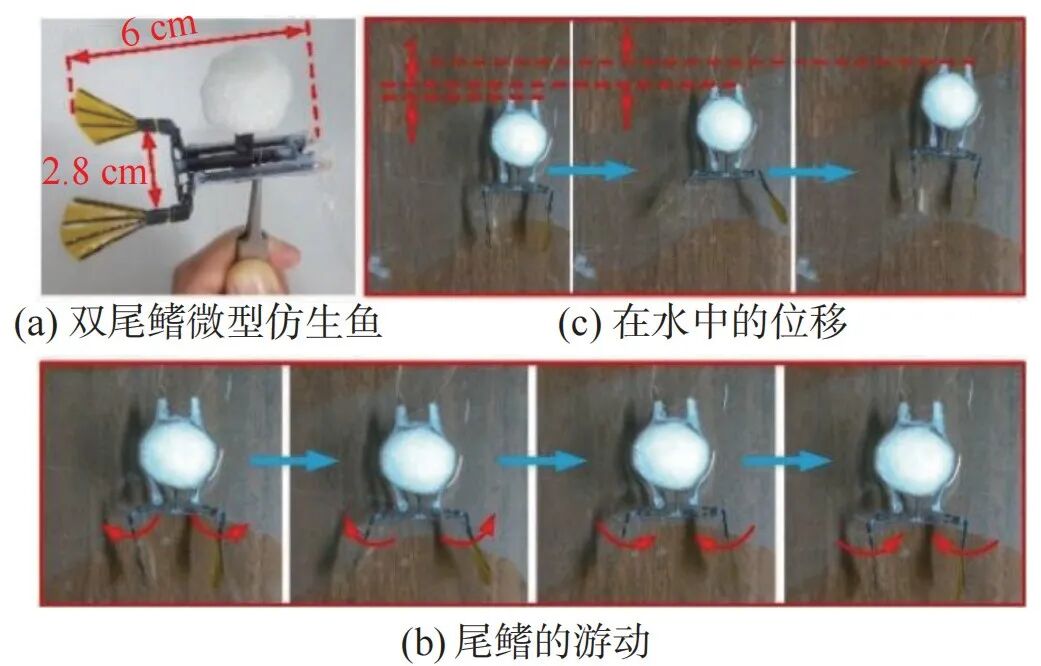
图14 双尾鳍微型仿生鱼
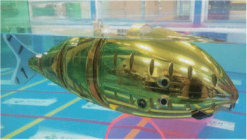
图15 仿生机器鱼ICHTHUS V5.7
但现有仿生机器鱼在推进效率与机动性方面往往存在性能折中问题。ICHTHUS V5.7达到了4 BL/s(2m/s)的直线游速,但机动性能有待提高;LIU等研制的机器鱼G9虽具备1.02 BL/s的直线游速,转弯角速度可达110(°/s),但在复杂机动场景下的运动稳定性不足;iSplash-II机器鱼最大直线游速可达11.6 BL/s(3.7m/s),但无法完成转向。这些仿生机器鱼运动性能的显著差异揭示了传统设计在推进-机动协同优化方面的技术瓶颈。中国科学院自动化研究所研制出新型仿生两关节机器鱼(图16),其第一个关节采用偏心轮结构,即齿轮电动机带动关节来回摆动以产生足够的推进力;第二关节由一根“Z”形连杆驱动,以节省大量空间并降低传动机构的阻力。这样的设计使其在推进系统的综合优化上实现了较大的突破,该机器鱼最大直线游速可达3.07 BL/s(1.14m/s),常规转向角速度达到90°/s,且在复杂机动模式下仍可保持63.8°/s的有效角速度。
图16 两关节机器鱼的机械结构
大多数仿生机器鱼系统以低频率(≤3Hz)运行,导致游泳速度低(≤1.5 BL/s),运输成本(COT)通常比黄鳍金枪鱼高1到4个数量级。而弗吉尼亚大学White团队推出的Tunabot Flex(图17)通过模块化设计调整关节数量与角度以研究身体灵活性的作用并缩小机器人和生物系统之间的性能差距。研究人员探索不同自由度(2 DoF、3 DoF、4 DoF)和柔性配置对机器鱼性能的影响,当摆尾频率为8Hz时,实现了4.6 BL/s(1.17m/s)的高速游动,且其最灵活配置的COT在所有测试速度中仅比黄鳍金枪鱼的COT大不到半个数量级。
湍流与复杂系统国家重点实验室的陈迪团队研制出一款小型高速仿生机器鱼(图18),其具备高速游泳和与鱼类一样跳跃的能力。其设计理念以小型化和轻量化为主,通过伺服电机驱动一对单自由度的胸鳍,以实现俯仰运动,柔顺关节中加入扭力弹簧以增大传递到尾鳍的动力;研究人员采用4种不同柔性关节和尾鳍刚度进行游动和跳跃实验,测得其最大速度为8.4 BL/s(2.22m/s),稳定速度为7.1 BL/s(1.88m/s),远高于一般机器鱼的速度,且最大跳跃高度可达0.23m,最大游泳距离至427m。该研究通过优化刚度显著提高了速度和运动跳跃性能,但在高频运动下的功耗仍大于Tunabot和Tunabot Flex等仿生机器鱼。
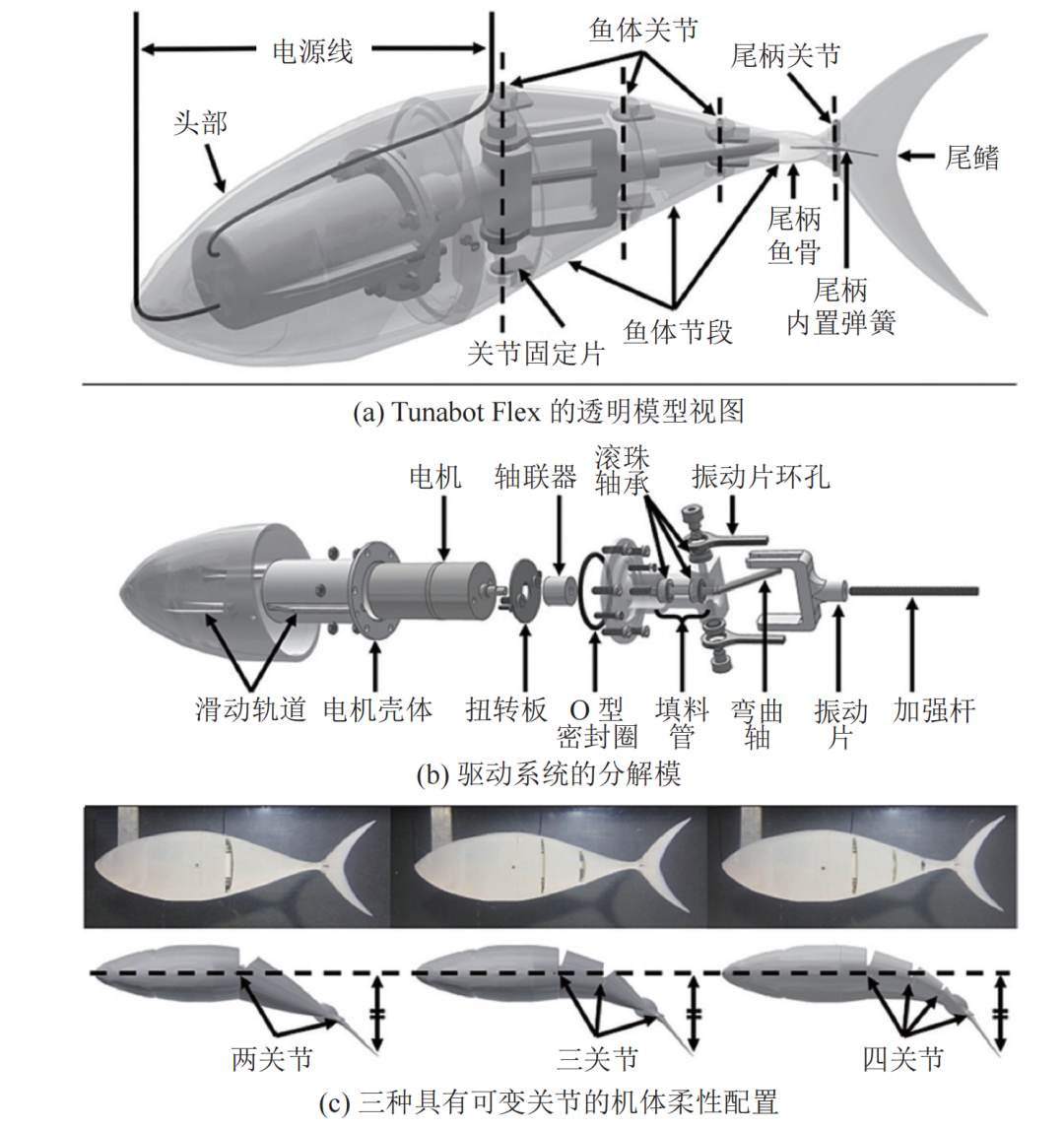
图17 仿生机器鱼TunabotFlex

图18 无绳高速游泳机器鱼
⒌高速仿生鱼应用领域的扩展
除了推进系统的研究,许多高速仿生机器鱼项目已拓展至环境监测、军事探测、科学考察等应用领域。例如,ICHTHUS V5.7集成了多种嵌入式传感器,如超声波距离传感器、GPS传感器、水压传感器、INS(惯性导航系统)等,能够在河流等真实环境中进行自主导航,并可以用作环境监测系统,以监测水质污染。北京航空航天大学与中国科学院自动化所共同开发了SPC系列仿生机器鱼。其二代SPC-II仿生机器鱼(图19)内部集成了电池、GPS和罗盘组合导航系统,可在5m水深范围内保持定深的自主航行,在福建东山岛郑成功古战船遗址水下考古工作中首次应用,对4000m2的水域进行了摄像考察,有关图像能即时传送到水面指挥部并在2.5Hz下达到最高游速1.14 BL/s(1.4m/s),证明了其在复杂水下环境中的探索能力。同一系列的SPC-III仿生机器鱼(图20)通过搭载多参数水质探测仪,最大速度可达0.87 BL/s(1.36m/s),在太湖完成了约49km的水质探测巡游,获取了蓝绿藻浓度分布等重要水质数据。至2023年,中国太湖蓝藻水华面积和密度较往年分别下降了45.7%和30.3%,达到2007年以来的最佳水平。

图19 仿生水下航行器SPC-II
此外,机电一体化和机器人系统(MaRS)实验室的NG团队设计出的Snapp机器鱼(图21)以一种新颖的循环微分方法对柔性尾鳍进行偏航控制,而胸鳍控制滚动和俯仰。该机器鱼不仅可以执行复杂的游泳动作,如“8”字形和“S”形轨迹,还具有较高的负载能力,能够连续运行30min,携带高达1kg有效载荷。在2.7Hz和4Hz两种驱动模式下,其平均游泳速度分别达到1.8 BL/s(1m/s)和2.7 BL/s(1.5m/s),为深海探测提供了技术支持。

图20 仿生水下航行器SPC-III

图21 仿生机器鱼Snapp
针对大型油浸式变压器内部检测的特殊工况,国家电网天津公司研制了一款仿生机器鱼检测装置,具备360°全周向姿态调整能力,其巡航速度与垂向速度分别稳定在0.04m/s和0.025m/s,悬停定位误差不超过0.03m。该装备同时集图像识别、空间定位、路径跟踪和全向巡航等功能于一体,有效协助天津电网将2023年设备故障率同比降低15%;在供电质量方面,系统整体可靠性指标达到99.9931%,供电电压合格率提升至99.997%,该成果为封闭式电力设备的在役检测提供了创新解决方案。
四、高速仿生机器鱼的未来研究方向
及发展趋势
这些研究工作不仅在仿生学和机器人技术的结合上取得了卓越成就,还展示了在材料选择、驱动系统、控制算法和应用领域的创新。但不难看出,仿生机器鱼与真鱼在性能方面(如游速、转弯角度等)仍有较大差距。鱼类可以表现出自由灵活的机动性能,如逃跑、快速提速和制动,而机器鱼只能执行简单的转弯、直游或潜水。因此,未来仿生机器鱼的发展方向可能集中在以下几个方面。
⒈推进效率与能源消耗
传统的电机和推进器在高速下可能会导致较大的能量消耗和热量积累,影响续航和稳定性。此外,目前以传统电机方式驱动的高速仿生机器鱼,虽游速较快,但广泛存在体积较大、柔性不足的问题,如SPC-III长1.75m、仿生-Ⅰ长2.4m,不利于水下作业。
将低耗能材料和高效驱动系统相结合是仿生机器鱼实现游速突破的一大关键。未来需要开发更加新型高效的推进系统,如改进的仿生鳍片驱动、流体动力学优化的推进器等;液压形式的推进器在稳定性和能量可回收性方面也具有很大的前景,它有望应用于实现仿生鱼体波动和类似肌肉收缩的运动。
⒉流体动力学设计
鱼类的身体形状、皮肤结构及游动方式都经过了亿万年的进化,能够有效减少水中的阻力和涡流。仿生机器鱼难以完全复制这种精细的结构和动态流体特性,尤其是在高速游动时,如何减小湍流和阻力是一个难点。
未来可以采用更先进的CFD模拟和仿生设计,精确模拟鱼类的复杂流体动力学环境,并优化机器鱼的形状和结构以减少阻力和能量损耗。CFD可以模拟不同推进系统的流场分布和涡流结构,评估不同设计对推力和效率的影响,使得仿生鱼的多种设计方案可以在虚拟环境中进行测试和优化,大大缩短了研发周期和成本。研究人员可以在CFD环境中测试各种仿生鱼的形态和运动模式,找到最优的设计方案,以达到更高的推进速度。
⒊自主感知与自主决策
高速游动时,仿生机器鱼需要精确的姿态控制和高效的导航能力。水下环境复杂多变,存在不确定的流体环境和障碍物,传统的控制算法和传感器可能无法满足高速情况下对实时性和精度的要求。
现有的许多研究集中于开发模拟具有真实鱼类侧线感知功能的人工侧线,使仿生机器鱼能够更好地进行水动力环境传感和涡流检测等,从而使其在运动学习及自适应行为优化等方面也有显著的进展。FishGym平台的提出,为仿生机器鱼提供了一个高效的训练框架,该平台利用关节体和蒙皮技术构建仿生鱼模型,并基于GPU实现高性能局部双向耦合的流体-结构相互作用仿真,使仿生鱼能够在仿真环境中精确感知自身运动状态,并通过强化学习不断优化游动策略,提升游动速率和环境适应性。此外,OpenFish作为一种开源软体仿生机器鱼,采用了主动与被动相结合的尾部结构,该设计不仅优化了高速游动能力(优于之前报道的最快软体机器鱼27%),同时赋予了机器鱼更强的自适应行为,使其能够感知流场变化并动态调整自身运动方式,提高推进效率和机动性。
未来还可以在控制算法上,结合人工智能和机器学习技术,开发更加智能化、自主化的控制系统,以应对复杂的水下环境。例如,根据风或波参数等复杂海洋环境中存在的影响因素,提出的基于反向传播神经网络(BPNN)和遗传算法(GA)的速度预测算法(GA-BPNN),可提高在海洋环境中预测机器鱼速度和航向的准确性和效率。而通过随机算法结合神经网络可实现仿生机器鱼的运动控制,在一定程度上改善机器鱼运动过程中水流和其它非线性因素引起的扰动。通过整合机器学习和自适应控制算法,实时调整推进系统的工作状态和鱼体姿态。可尝试在不同的流体条件下,自动调整鱼鳍的角度和频率,最大限度地减少阻力并提高速度。同时,开发更敏感的传感器来监测流体环境中的压力、速度及方向变化,通过反馈机制实时优化鱼体的运动模式,确保在高速游动中维持稳定的推进效果。
⒋材料与结构优化
高速运动会对机器鱼的结构和材料产生更大的应力和劳损,而减少能量消耗还需要机器鱼轻量化,这使得传统材料无法满足需求。现有的新型驱动材料适合小型和微型仿生鱼,但相比传统电机驱动,此类材料驱动的输出力有限、驱动效率低、材料寿命较短、稳定性较差。如何突破新型材料的局限,是提升仿生鱼高速游动性能的另一关键。
目前的研究重点应集中于研发更轻质、更坚韧的复合材料,如生物启发聚合物、智能材料等,以模拟生物组织的灵活性和强度,有利于增强仿生系统的机械可行性和环境可持续性。可借鉴中国科学院沈阳自动化研究所开发的基于仿生肌肉驱动与嵌入式柔性感知的软体机器鱼,其核心结构由3D打印的柔性仿生框架以及集成多种驱动单元与传感元件的软体驱动器构成。该软体驱动器采用多层柱状设计,由压缩弹簧、介电弹性体(DE)薄膜及柔性电极组成。其中,压缩弹簧模拟鱼类脊柱的支撑功能,增强机器鱼整体结构的稳定性;而多层柔性薄膜则模拟生物鱼类的肌肉组织,赋予机器鱼形变能力并提供驱动动力。这种集成化设计显著提升了仿生机器鱼的运动灵活性及环境适应性。此外,还利用仿生学的设计原则,开发既能够承受高速运动产生的应力,又能有效模仿鱼类皮肤的顺应性的仿生皮肤材料。新研发的微纳4D打印技术具有一定的可用性。它是微纳3D打印和智能响应材料的结合,通过在3维静态结构中引入对外界刺激(如磁场、溶剂、pH值、温度、光照等)有响应的材料,实现了复杂微纳结构的动态调控,为仿生机器鱼的动态结构调控提供了新的途径,可以利用其制作鱼类复杂波动的柔性鱼鳍,动态调整形状以适应不同的流体环境,从而提高机器鱼的推进效率和在复杂水环境中的机动性。未来还可结合计算机物理仿真以高效选择并优化机器鱼的材料参数,如ZHANG等提出了一个实验模拟框架,通过可微分仿真从准静态数据中学习仿生机器鱼的材料参数,并将其应用于动态性能的预测而无需进行广泛的材料测试,能有效缩短材料研发周期,减少实验迭代次数。
⒌续航与能源管理
高速游动需要更多的能量供应,这对仿生机器鱼的电池容量和续航能力提出了更高的要求。现有的电池技术可能无法在体积和重量受限的情况下提供足够的能量。
未来可考虑深入研发高效的能源管理系统和更高能量密度的电池,同时探索水下能量获取和再生系统,如微型水力发电、化学能转换等,为仿生机器鱼提供持久的动力来源。此外,还可以尝试研究能量回收机制,如在鳍片运动过程中回收动能,以减少整体能量消耗。
⒍多机器鱼协作系统
在自然界中,鱼类时常以集群的形式觅食、防御和巡航。这也可以为水下机器人系统的开发提供灵感。受限于水下作业环境的高度不确定性,仿生推进结构的独特性,以及水下通信、环境感知、精确定位等技术的瓶颈,实现多仿生水下机器人系统的协同将是一个非常具有挑战性的方向。
研究者们借鉴生物群体行为并结合人工智能优化算法,推动仿生鱼群体智能的演化。针对多机器鱼任务分配问题,研究者利用蚁群算法优化个体任务分配与路径规划,提高了协作效率和任务执行的准确性,通过设计特定的势能函数,确保机器鱼群体中所有个体的运动方向趋于一致,运动速度快速收敛至同一值,从而有效规避机器鱼间的运动干涉风险。此外,强化学习在多自主水下机器人导航中的应用也受到了广泛关注,通过自适应学习,机器人能够自主探索最优路径,实现高效的协同导航。在分布式控制方面,研究者提出了一种基于强化学习和认知一致性理论的控制方法,该方法无需了解机器鱼的动力学模型,仅依赖仿真训练,即可直接迁移至真实机器人模型,显著提升了仿生鱼群的自主决策能力及环境适应性。此外,受鱼群和鸟群等自然群体行为的启发,设计出一种应用于分布式控制机器人群体的新型仿生学方法,使仿生鱼能够通过局部感知和信息共享,自主调整队形和行为模式,提高整体系统的协调性和稳定性。
通过利用多个仿生水下机器鱼组成协作系统,学习鱼群的避碰、分工、领队跟随等机制,将有助于实现大规模、多任务的协作,有效提高水下作业效率。同时,机器鱼协作系统需要构建高实时性、低时延性的通信网络,以保障个体之间的信息能够实时传递,并通过多次尝试和反馈不断优化自身的运动轨迹和协作策略。
五、结论
本文系统梳理了水下高速仿生机器鱼领域的研究现状与发展动态。依据生物运动机理和机械驱动材料特征,简要介绍了各类水下仿生机器鱼的特点及优劣势,并通过分析高速鱼类具有的生物学特征和推进机理总结了该领域的主要成果。可以看出在国际范围内,水下高速仿生机器鱼的研究在机械结构设计、新型材料应用及智能控制算法等关键领域均已取得显著进展。一些原型机已经实现了快速转弯、路径跟踪、自主作业和其他难度动作,在速度和机动性方面也有了很大的提高,但由于水下环境的复杂性,水下机器鱼的机械结构设计与控制技术仍需进一步优化和改进。未来可以通过增强水下机器鱼的自我控制和自我感知等特性并结合机器人系统的协调控制,使高速仿生鱼可以更好地融入水下环境完成各类工作。相信通过多学科交叉研究,结合人工智能和先进制造技术,高速仿生鱼项目有望在未来实现更快、更高效的水下运动,满足日益增长的海洋探测和资源开发需求。这不仅将推动仿生机器人技术的发展,还将为海洋科学、环境监测和军事应用提供强大的技术支撑。
1
END
1
【作者简介】文/邱玥 陈明茹 王旭 黄永祥 余国栋 庄焱 王常宇 肖佳媚,分别来自海洋生物地球化学全国重点实验室(厦门大学)、厦门大学海洋与地球学院、中国科学院沈阳自动化研究所机器人与智能系统全国重点实验室、厦门大学马来西亚分校中国-东盟海洋学院、沈阳工业大学机械工程学院。本文受基金项目赞助,厦门大学近海海洋环境科学国家重点实验室与中国科学院沈阳自动化研究所机器人学国家重点实验室“海洋科学与技术交叉创新研究基金”(MR202401)。文章来自《信息与控制》(2026年第1期),用于学习与交流,参考文献略,版权归作者及出版社共同拥有,转载也请备注由“溪流之海洋人生”微信公众平台编辑与整理。

相关阅读推荐
海洋论坛▏仿生水下机器人发展现状及关键技术分析
海洋论坛▏仿生水下机器人的总体设计与分析
海洋论坛▏水下仿生扑翼机器人的驱动与样机及控制研究
科技动态▏智能仿生机器鱼及研制方法
溪流笔谈▏作为六大新兴支柱产业之一,细数海洋智能机器人及其应用
海洋论坛▏蝠鲼集群滑翔水动力性能研究




公众号
溪流之海洋人生
微信号▏xiliu92899

用专业精神创造价值
用人文关怀引发共鸣
您的关注就是我们前行的动力
投稿邮箱▏2705319347@qq.com






