五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库“不是个体荣光,更是团体金牌”——写在人形机器人半程马拉松赛后

4月19日,北京亦庄人形机器人半程马拉松赛事在万众瞩目中落下帷幕。北斗星通高精度定位模块、高精度定位天线、以及代理的激光雷达产品等方案组合默默助力了数个领先团队取得佳绩,见证了中国人形机器人技术的全维度突破,与有荣焉。正如北京人形机器人创新中心在感谢信中所说,“这份耀眼的成果不单是某项赛事的个人金牌,更是属于整个中国具身智能行业的团体金牌!”。
此次赛事中自主导航、高速运控、长时续航、液冷散热等核心技术突出,彰显了具身智能从技术验证到落地生态有了关键技术底座。下面我们站在GNSS定位角度,聊一聊具身机器人与GNSS高精度定位。
定位需求的技术本质
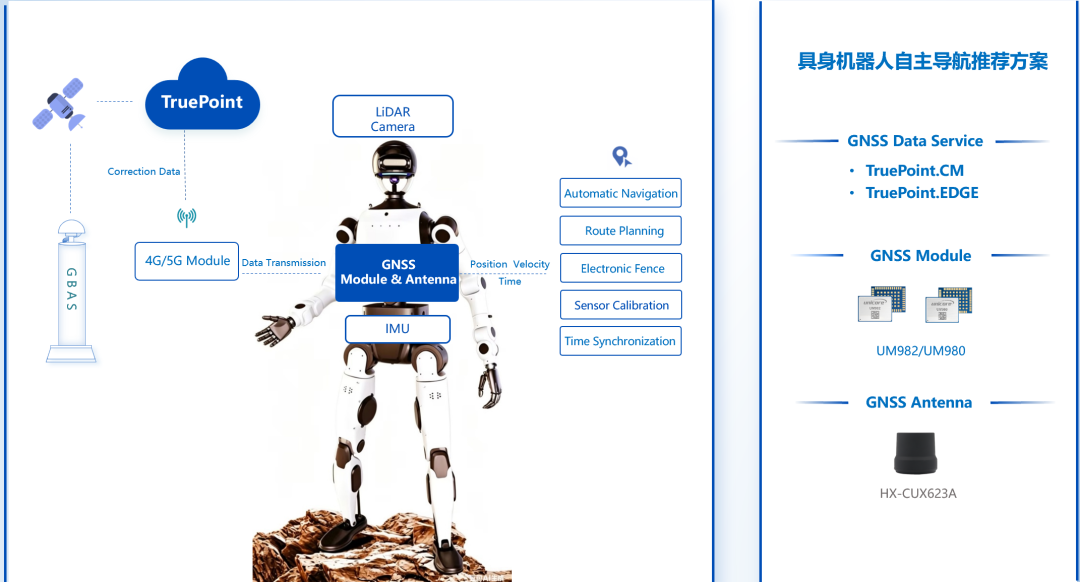
人形机器人的自主导航与作业能力,依赖于绝对定位与相对定位的深度融合。在室内外过渡场景(如园区巡检、物流配送、应急救援)中,GNSS高精度定位提供了不可或缺的全局时空基准,使多机器人协同、云端调度与地理围栏管控成为可能。区别于标准精度的Tracker方案只解决"在哪里"的问题,高精度GNSS解决"精确在哪里、朝向何方、与队友的精确相对关系"的问题,是自主导航从"能移动"迈向"可信赖"的技术分水岭。
GNSS模块与天线选型的工程考量
与早期自动驾驶产业(主平台提供芯片,Tier 1做集成,OEM做整车)的分工逻辑类似,具身机器人厂商往往优先解决机械结构、关节执行器、基础运动控制等,将全自主导航视为下游集成商或终端用户的二次开发空间。
GNSS模块层面,人形机器人通常选用多频多星座接收机,以抑制电离层误差并提升城市峡谷环境下的可用性。鉴于机器人本体对载荷与功耗的严苛限制,模块选型需在定位精度、功耗预算、尺寸形态之间取得平衡。主流方案包括和芯星通UM982/UM980系列,以期在复杂多径环境下展现出更强的信号跟踪鲁棒性。
而天线设计是人形机器人GNSS性能的关键环节。由于机器人躯干对卫星信号的遮挡与多径反射,控制系统、电机运行带来的干扰噪声,传统贴片天线难以满足需求。工程实践倾向于采用小体积的螺旋天线或叠层陶瓷天线,配合地平面优化设计与射频前端滤波,以提升低仰角增益与带外抑制能力。此次半程马拉松赛事中有团队采用的是北斗星通旗下华信天线的四臂螺旋天线CUX623A。
高精度定位服务的架构选择
人形机器人获取高精度定位修正数据,主要依赖两条技术路径:
多源融合:
GNSS与LiDAR、IMU的协同
人形机器人的定位系统绝非GNSS的单点作战,而是多源异构传感器的融合:
对于人形机器人的自主导航——定义为在复杂环境中安全、高效、可预测地执行精确任务——高精度GNSS不是可选增强,而是架构必需的"基础设施":
图片所示为天工“双冠王”——2025年半马冠军,
以及2026年机器人勇士挑战赛冠军
我们相信,未来随着 LEO-PNT 低轨卫星导航增强技术的推进,人形机器人有望通过低轨星座获得更高功率、更低延迟的导航信号,进一步压缩城市峡谷与室内的定位盲区。同时,GNSS/INS/LiDAR/视觉的多源融合架构,结合AI,将成为下一代人形机器人定位系统的技术标配,支撑其在非结构化环境中的全自主作业。