五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库【收藏 !】机海务、船长、轮机长必学:船舶远程控制技术规范要点研究丨海员之家


●今日目录 ●
● 【收藏 !】机海务、船长、轮机长必学:船舶远程控制技术规范要点研究丨海员之家
● 【重拳出击!】IMO 通过全球首份国际准则,严打海事欺诈与船旗滥用丨海员之家
● 【注意 !】淌航?龟速?6频道已炸锅!丨海员之家
● 【船员健康】长期耳鸣别大意,这是身体在悄悄提醒你丨海员之家
● 【公告】关于发布《注册验船师资格考试复习指南(2026版)》的公告丨海员之家
智能船舶通过集成先进信息技术、人工智能、物联网、大数据以及自动化控制等关键技术,实现了船舶控制运行的智能化和远程化,已成为未来船舶发展的重要方向。
本文系统梳理并研究了中国船级社、挪威船级社等六家国际主流船级社发布的智能船舶相关规范与指南,重点对比分析了各船级社智能船舶规范的主要架构及其对远程控制的具体要求,总结了船舶远程控制需遵循的核心原则,并在此基础上提炼出远程控制船舶的技术规范要点与总体框架。
整个研究内容将分三期进行详细阐述,本期首先聚焦挪威船级社(DNV)、劳氏船级社(LR)和美国船级社(ABS)的相关规范内容。

▲图源:网络,侵权必删
DNV(挪威船级社)针对智能船舶的发展,发布了自主与远程控制船舶的附加船级符号规范及相关指南,主要包括《RULES FOR CLASSIFICATION Part 6 Additional Class notations》和《Autonomous and remotely operated vessels(2024)》。
一、入级符号结构
根据DNV规范,自主与远程控制船舶的船级符号为AROS,该体系引入了若干新的基础要素,如远程操作中心(ROC)、通信连通性等。
DNV明确规定,获取AROS船级符号的前提是船舶在所有操作模式下均须有自然人参与。AROS符号进一步根据功能划分为四个方面:AROS-NAV(航行功能),涵盖自主航行规划、决策与避碰等智能应用;
AROS-ENG(轮机功能),包括动力装置、辅助系统与电力系统等的智能控制;
AROS-SAFE(安全功能),针对人员、船舶及环境安全,覆盖救生、消防与防污染等领域;
AROS-OPS(运行功能),涉及货物管理、乘客服务、积载等其它方面的自主与远程操作。
此外,DNV还引入了控制模式与控制位置的分类:控制模式分为远程控制(RC)、决策支持(DS)、监控下的自主(SA)和完全自主四种;
控制位置则包括船上控制(OB)、船外控制(OS)和混合控制(HC)三类。
一艘船舶可同时获得多个AROS功能符号,但每个功能符号至少对应一种操作模式与一种控制位置,具体结构如下图所示。

▲图源:网络,侵权必删
二、远程控制要求
DNV将远程控制定义为利用电信技术进行信息传输,在远离被控设备的位置实施操作控制。
规范中关于远程控制的要求主要依据前述四种控制模式和三种控制位置的结构展开,涵盖所有控制模式下的通用要求、远程控制模式的特殊要求、非船上控制位置的要求及混合控制位置的要求等方面。
1. 所有控制模式的通用要求
自主与远程船舶需配备自主与远程系统(autonomous and remote system),该系统需满足一系列功能要求:
01 在任何控制模式下,系统应能向操作人员提供监督管理、任务推进控制、状态回退激活、相关设备控制、系统运行监控及故障识别与排除等手段;
02 系统需能够监控关键传感器信息的可用性、有效性、完整性与合理性,并在出现偏差或不可接受情况时及时通知操作员;
03 系统应提供完整的态势感知信息,确保操作员能够建立并维持全局态势感知,并具备足够的干预时间;
04 系统应能提供充分的预警信息,持续监视并记录系统性能,及时通知和提醒人员系统的运行状态;
05 船舶及控制地点需按要求保存运行日志与记录,并能以人员可读的格式提供。
2. 远程控制模式的特殊要求
针对远程控制模式,DNV强调其总体原则应等同于常规船舶上相应系统和设备的操作水平。
远程操作中心(ROC)中的远程控制系统需为操作员提供充分的信息支持,确保其有足够时间进行情况评估、计划制定、决策与行动执行。
同时,船上的自主与远程系统和设备需能够及时、准确地响应并执行远程控制指令。
控制系统应当在相关方与远程操作人员之间建立可靠的双向通信机制,确保信息传递的准确性和实时性。
对于船外远程控制的要求,远程操作中心(ROC)作为关键控制节点,需满足配置、供电、监测、人机界面及通信等方面的基本规范。
例如,ROC中应至少配备一个备用远程工作站,并确保控制船舶所必需的全部设备配置容量充分的不间断电源,以保障系统持续稳定运行。
对于船上与远程人员混合控制模式,需特别关注两者之间的交互机制与控制权限分配。
具体应涵盖通信手段的多样性、控制权状态的明确指示、数据与信息共享机制、统一的人机界面设计、警报指示方式、系统操作日志记录及系统状态跟踪等功能。
远程与船上人员之间应至少建立两种不同类型的通信链路,并确保语音通信的可用性。
远程操作人员应获得与船上人员一致的操作界面和数据访问权限,以形成对船舶状态的共同理解。
不同控制位置之间需预先设定控制优先级,并在特定条件下允许任一方在未获对方确认的情况下接管控制权,同时须确保控制权转移过程不被意外触发。
自主远程系统需能够向船上及远程操作人员同步显示警报信息,且仅在确定警报处理责任的地点启动声音提醒。
各方人员应能够共同访问和编辑系统操作日志。
连通性指船舶与船外基础设施进行信息交互的能力,其要求主要包括连接链路的安全性、可靠性、容量保障、性能监控、异常警报、冗余配置及数据传输优先级管理等。
系统应支持船舶与任何外部基础设施之间的双向数据传输,并明确规定带宽、延迟等关键性能指标。
若性能参数未达要求,应及时通知相关人员,并优先保障与船舶安全直接相关的数据流。
连接链路应具备冗余和容错能力,至少由两条独立通信链路构成,理想情况下应采用不同的底层技术、供应商及网络运营商,并确保数据传输机制的安全性。
自主远程系统需记录船舶与ROC之间的连接状态及重要事件,相关日志应在规定时间范围内可供调阅分析。
网络安全方面的要求直接引用DNV规范相关章节,其中明确规定ROC的网络应与其他网络物理隔离,禁止跨船舶链接,即不允许从一艘船舶链接至另一艘船舶。
三、《自主与远程控制船舶指南(2024)》
该指南旨在为自主与远程控制船舶提供技术框架,确保其安全水平不低于传统船舶,并为自主与远程操作船舶(AROS)相关符号认证提供详细依据。
其适用范围覆盖所有船型,涉及船上系统、远程操作中心及通信连通性等方面。
DNV在评估中秉持等效安全、基于风险、操作导向、回退状态机制、功能聚焦、人机协作水平、系统工程与集成、设计原则、软件工程与测试以及网络安全等基本原则。
该指南仍以符号体系为基础,涵盖航行、轮机、安全和操作四大功能模块及其子功能,同时综合考虑三种操作模式与不同控制位置,在审批程序与技术细则方面更为详尽。
LR(英国劳氏船级社)针对智能船舶颁布了《无人船系统规则》(Code for Unmanned Marine Systems),适用于水面和水下自主航行船舶及远程操作船舶,但不包括系留在母船上操作的水下航行器。
该规则将自主等级划分为7级(AL0–AL6),从完全手动操作到全自主无监督运行,明确每一等级下的人机职责分工:
·- AL 0)手动模式:
无任何自主功能,所有操作与决策均由人员手动执行;
·- AL 1)船上决策支持:
操作由人员执行,决策支持系统可提供选项或影响人员决策,数据来源于船载系统;
·- AL 2)船上与非船上决策支持:
操作由人员执行,决策支持可基于船载或外部系统提供的数据;
·- AL 3)人员“积极”在环:
系统在人员持续监督下执行决策与动作,数据可来自船载或外部系统;
·- AL 4)人工在环(操作员或监督员):
决策与动作由系统自主执行,人员在环进行监督或干预。
·改写说明:
·扩充逻辑链条和背景细节
:对各项技术和管理要求进行了因果、机制或操作场景的补充,使内容更连贯和完整。
·统一并规范术语与表述:
对重复或类似表述进行了合并和标准化,提高整体一致性和专业性。
·优化语句结构和信息密度:通
过调整语序和精简冗余,在扩展的同时确保内容紧凑、条理清晰。
·如有需要其他风格或用途的扩写,我可以进一步为您调整。
同时,系统也接受人的监督,人员能够对决策进行干预和否决,确保操作过程的安全可控。
·AL 5)完全自主模式:
在该模式下,极少需要人员的监督操作,系统能够自主完成大部分决策和动作执行,仅在关键节点需要人工确认。
·AL 6)完全自主模式:
该模式下无人员监督操作,在任务期间的所有决策和动作完全由系统自主完成,实现高度自动化的运行。
该规则围绕船舶结构、稳性、控制系统、电气系统、航行、推进与操纵、消防、辅助系统等多个方面,在功能目标、性能要求、验证与维护等环节作出规定,内容较为宏观。
附件中提供了操作概念(ConOps)和验证方法,为实际执行提供指导。
针对远程控制方面的要求主要体现在控制系统中,对人机界面和交互、故障警报、电磁兼容、备用控制位置、运行维护、超过操作限制的应对措施等提出了宏观性要求。
例如,规则中指出,当系统接近操作限制时应向操作员提供警报,超过操作限制时则不仅要发出警报,还要能够自动返回安全状态。
ABS(美国船级社)针对智能船舶发布了《自主和远程控制功能要求》(Requirements for Autonomous and Remote Control Functions),并进行了多版更新。该规范适用于所有船舶和海上设施,侧重于船舶的自主和远程控制功能及相关要求,但在系统维护、事件处置、人员配置等方面未作深入考虑。
一、入级符号
针对自主和远程控制功能,ABS分别设置了AUTONOMOUS和REMOTE-CON两种入级符号,并按照功能类别和操作监控水平进行分级。表示形式为AUTONOMOUS/REMOTE-CON(功能类别,操作监控水平)。
1. 功能类别
功能类别主要包括航行、操作、锚泊等,共涵盖11项内容,未涵盖的功能将通过个案评估方式考虑。具体包括:
i) 航行(NAV)
ii) 操纵(MNV)
iii) 锚泊(MOR)
iv) 靠离泊(DOC)
v) 推进(PRP)
vi) 辅助设备(AUX)
vii) 环境保护(ENV)
viii) 货物装卸(CGH)
ix) 压载水(BAL)
x) 工业流程(IND)
xi) 自主平台(APF)
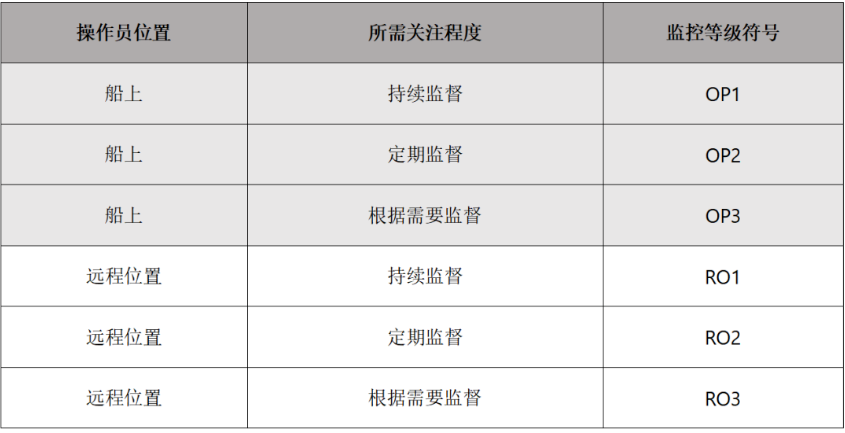
2. 操作监控水平
船舶自主能力与操作人员在监测、分析、决策、执行等任务环节中的参与程度密切相关。
操作监控水平反映了该功能在运行中的监控配置情况,按监控位置和监控等级进一步划分。
监控位置包括船上和远程监控,监控等级包括持续监控、定期监控和按需监控,相应符号为:OP1,OP2,OP3,RO1,RO2,RO3。
▲图源:网络,侵权必删
3. 自主和远程控制符号示例
如果一艘船舶具备航行的自主功能,同时有船上和远程位置的操作人员进行定期监控,则其符号为AUTONOMOUS(NAV,OP2,RO2)。
如果一艘船舶具备航行的远程控制功能,同时船上和远程位置的人员进行定期监控,则符号为REMOTE-CON(NAV,OP2,RO2)。
保持船级符号的条件主要包括证书、记录、文件等方面的符合性。
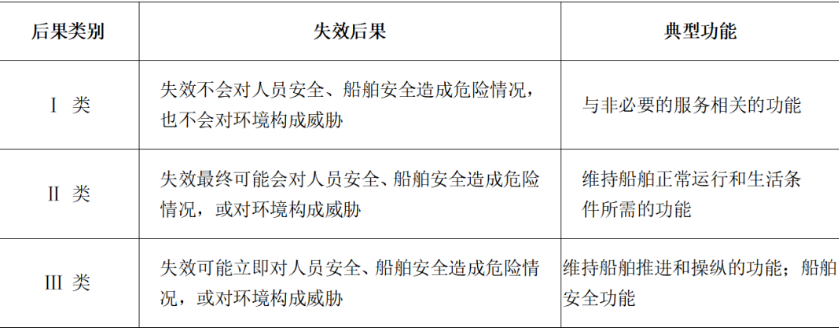
4. 风险等级
ABS将自主和远程控制功能的失效后果划分为三类:不构成风险、最终构成风险和立即构成风险,每类对应不同的典型功能。
▲图源:网络,侵权必删
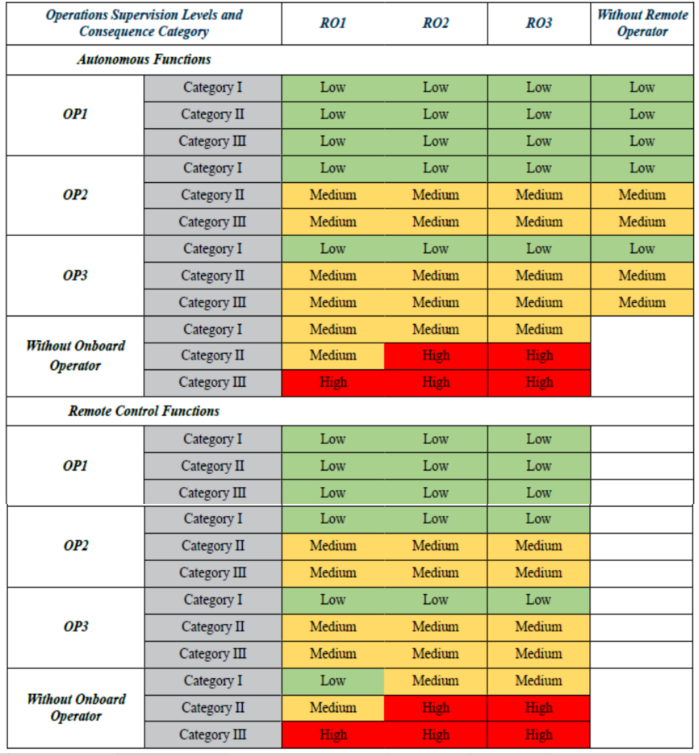
每一个自主和远程控制功能都要求对应一个风险等级,该等级由失效后果及船上和远程人员的监督等级共同确定。
具体风险等级的划分情况如下表所示。
▲图源:网络,侵权必删
二、远程控制
ABS将远程控制功能定义为在远程位置进行控制的功能。在其文件中,对远程控制功能从遵循标准、操作概念(ConOps)、风险评估、系统架构、远程控制站(remote control station)、数据通信、网络安全等方面提出了具体要求。
1. 远程控制功能标准
i) 远程控制站在指定的操作期间应保持经常有人值守。
§ii) 远程操作员被明确指定,并负责远程控制功能的执行。
§iii) 远程操作人员应能够随时对远程控制下的系统和操作进行监控。
iv) 远程操作人员应具备从远程位置实施控制功能的能力。
操作员可以被指定为船上的后备操作员,以便在必要时能够及时干预并重新接管系统控制功能,确保船舶运行的安全性和连续性。
二、操作概念(CONOPS)
CONOPS是一份需要持续更新和完善的重要文件,通常在项目启动初期建立草稿版本,随着项目逐步推进,在完成各项核查与确认流程后,需提交一份最终版的CONOPS供审批通过。
远程控制功能的ConOps内容涵盖多个方面,包括但不限于必要的后勤保障措施、功能或系统的维护计划、运行风险评估与应对策略、运行边界与限制条件、控制权限转换流程、应急响应与救援程序、远程控制站的组织架构设置、人员配置与职责分工、操作人员的资质标准与培训要求、人机交互界面设计以及网络安全防护措施等。
三、远程控制的要求
ABS对远程控制功能提出了“要求”(requirements)和“基础要求”两个层面的规范。
在“要求”部分,围绕远程控制站和远程操作人员能力,共提出四项准则,内容涵盖操作概念(ConOps)、系统风险评估、系统体系结构、远程控制站配置、数据传输保障及网络安全等方面,属于总体性、框架性规定。
而“基础要求”则是在ABS现有规范基础上,对参与远程控制的系统和设备提出的附加技术要求,包括电力供应、软硬件配置、报警系统、数据分析能力等方面的具体规定。
1. 远程控制站
针对远程控制站,ABS主要从电力供应、报警系统、状态视觉感知、网络通信和手持遥控设备等方面作出规定。
电力方面,要求无论岸基还是船载远程控制站均须保障充足电力供应,船上应配备两条独立馈电线供电,岸上则须配置不间断电源(UPS),一旦发生电力故障或供电中断,应在远程控制站和船舶端同时发出报警。
报警系统需为操作员提供声光报警提示。
状态感知方面,应确保操作员获取与船上实际功能运行一致的系统状态信息,远程控制站需提供功能运行状态的视觉反馈,但对无助于提升功能安全性的视觉信息可不作要求。
对于手持遥控器等无实体工作站的控制设备,应配备实体控制站或固定办公操作点作为支持。此外,远程控制站须接受年度检验。
2. 基本要求
远程控制功能除须符合ABS现行规范外,还需根据风险等级的不同满足以下附加要求:
01 电力供给。
供电系统应具备可靠性保护,控制、监视与报警系统的电力应来自两条独立电源,或其中一条配备备用电源或UPS电源。
02 软件和硬件。
须满足ABS《海船规范》中按风险等级划分的测试要求。低风险类别的软硬件可通过仿真模拟或物理测试验证;
中高风险类别则需同时进行模拟和物理测试。
03 监测报警。
应配备监测与报警系统,使操作人员能够实时掌握系统运行状态与必要信息。
监测报警信息需在船端和岸端所有控制站同步显示,并能够清晰识别功能控制状态。
04 数据分析。
ABS对数据管理提出全面要求,并依据风险等级作出相应规定。
所有风险等级均需涵盖数据驱动应用或混合模型的选择依据、数据来源与获取机制、数据挖掘方法、原始数据质量评估、数据修正与清洗流程、数据集成与存储方案、模型评价体系等,并须提交相关文档、记录、原理图及分析结果。
中风险等级还要求记录数据模型版本、审查模型升级与调整、监测模型应用情况,并建立监测计划和再训练机制。
高风险等级则进一步要求开展数据驱动模型或混合模型的风险评估,并进行仿真验证或等效评估。
要点研究(一)
BV(法国船级社)
BV船级社已发布多项涉及智能船舶的规范与指南。
在规范文件《NR675 ADDITIONAL CLASS NOTATION SMART》中,设立了“SMART”船级符号以标识船舶智能系统功能,主要包括船体智能功能(SMART-Hx)、机械智能功能(SMART-Mx)、航行智能功能(SMART-Nx)、能效智能功能(SMART-Ex)、电子日志智能功能(SMART-Lx)及特殊智能功能(SMART-Xx),且各功能均设有分级标准。
在其指南文件《GUIDANCE NOTE NI 641 Autonomous shipping》中,明确了自主等级划分和控制等级划分,并对远程控制、远程控制中心等作出详细规定。
下文将重点介绍该指南的主要内容。
一、自主等级划分
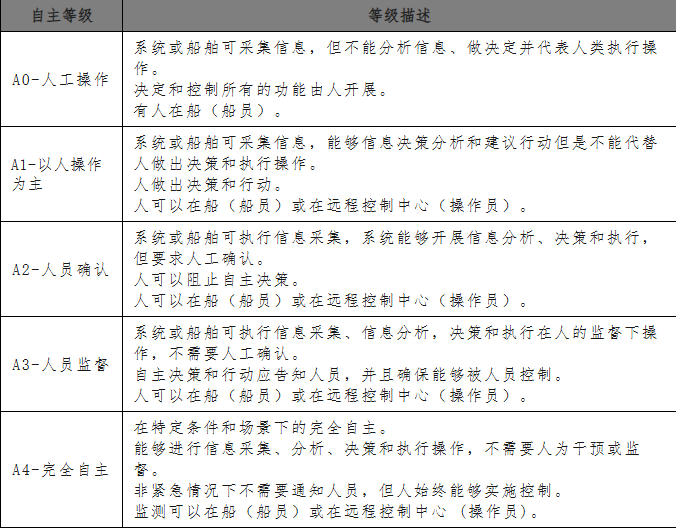
▲图源:网络,侵权必删
二、控制等级
BV指南明确指出,船舶控制的等级划分主要依据船上直接控制与远程控制的程度差异,并分别对这两类控制方式进行了细化分级。
对于应用自主系统的船舶,必须清晰界定船上直接控制(direct control)与远程控制(remote control)的具体范围与责任。
(一)直接控制等级划分
● DC0 - 无直接控制:船上无船员对系统或船舶实施监控,亦无人员在系统触发警告或警报时接管控制。
● DC1 - 具备直接控制能力:船上有船员处于待命状态,可在系统发出警告或警报时随时接管控制,但船员不一定位于控制站内。
● DC2 - 非连续直接控制:系统或船舶由船上船员进行间歇性监控,始终有船员处于待命状态,随时准备响应警报并接管控制。
● DC3 - 完全直接控制:系统或船舶在任何时候均由船上船员持续监测和控制。
(二)远程控制等级划分
● RC0 - 无远程控制:船外无操作人员对系统或船舶进行监控,亦不会在系统发出警告或警报时接管控制。
● RC1 - 具备远程控制能力:船舶以外的遥控中心配备操作人员,随时准备响应系统警告或警报并接管控制。
● RC2 - 非连续远程控制:系统或船舶由船外操作人员进行间断性监控,始终保持有操作人员待命,准备在警报触发时接管控制。
● RC3 - 完全远程控制:系统或船舶在任何时候均由船外远程控制中心的操作人员持续监测和控制。
从直接控制与远程控制的等级划分可看出,二者之间存在一定的互补与替代关系:直接控制程度越高,远程控制的程度则相应降低。
因此,在操作限制中必须清晰界定并详细描述系统与船员、系统与远程操作员、船员与远程操作员之间的角色分工与职责分配。
三、远程控制
BV指南针对远程控制提出了一系列要求,涵盖远程控制中心、人员资质、控制权限配置以及通信保障等方面。
1. 远程控制中心
远程控制中心(RCC)应在设计、管理和空间布局等方面遵循基本规范,并被视为船舶职能的延伸。
RCC应针对其所监管的每一艘船舶进行专门设计,并在设计与运营中充分考虑应对火灾、地震等意外事件的应急措施,同时符合岸基相关法律法规的要求。
RCC的系统设计应能清晰显示信息,辅助操作人员进行决策与远程控制,并提供可靠的通信手段。
其管理应纳入公司安全管理体系(SMS)之中。
RCC的设计与布局应依据ISO 11064《控制中心的人体工程学设计》标准,优化操作员视线与操作流程,减少操作疲劳。
2. 通信
远程控制船舶的操作对通信带宽的需求高于常规船舶,通常需配置多个通信信道,且远程控制的指令延迟不应超过1秒。
在远程操作期间,延迟信息应实时显示,若延迟超出预设阈值,系统需发出明确警告。
RCC应通过现有通信技术与船舶、VTS、港口或航运公司建立稳定连接,并至少确保具备接收遇险信号并转发至相关方的能力。
无论何种情况,RCC与船舶之间必须始终保持最低限度的通信链接。
远程操作人员有责任确保船舶始终处于其通信覆盖范围内,一旦船舶脱离可控通信范围,应能自动启动故障应急序列。
3. 监控与控制
船外实施控制操作的场所称为远程操作中心(ROC)。
船外远程控制主要对ROC的配置、供电可靠性、监控能力、人机界面及通信系统等方面提出宏观要求,例如ROC应至少设置一个备用远程工作站,控制船舶所必需的设备应配备容量充足的不间断电源等。
01 功能要求
无论船舶是否具备远程控制功能,其设计均应允许人员在登船或邻近船舶时能够实施控制。远程控制中心应具备规划航次数据并将其上传至船舶的能力。
在高度自主运行模式下,RCC人员应能够识别船舶运行异常、突发威胁及系统错误。
同一RCC可同时监控和控制多艘船舶。
在控制权限方面,船上人员的控制优先级高于远程操作员。
02 RCC控制界面
RCC控制界面除应满足现有驾驶台视野的相关标准,舶周围环境状况的监控,还应当全面覆盖海图信息、雷达显示以及气象图等关键数据。
在同时控制多艘船舶的情况下,系统需要在一个集成界面上集中展示每艘受控船舶的核心服务信息。
为便于清晰掌握船舶运行状态,RCC控制界面中的各项关键服务信息均采用分级管理机制,并配备彩色标识指示系统:绿色表示当前运行状态正常;
黄色代表出现需操作人员关注并核查的预警状态;
红色则意味着出现必须立即采取纠正措施的紧急报警状况。
RCC在运营过程中必须保证有专人实施不间断监控,多个远程控制中心可以采取轮班方式对船舶进行持续监视,但主控RCC需始终保持在白班运行状态,以避免夜间控制可能带来的操作风险。
关于RCC人员配置,具体要求包括人员的数量安排、资质条件、培训内容、工作经验以及值班制度等方面。
所有操作人员必须持有相应资质证书,身体健康,并具备充分经验,能够满足远程监控与控制船舶安全运行的多方面需求。
应为人员提供模拟器实操培训,加强实际操作能力,同时科学安排休息与值班时间,确保工作可持续性和操作可靠性。
中国船级社(CCS)自2015年发布全球首部《智能船舶规范》以来,持续推动智能船舶设计、建造与运营的标准化进程,历经多次版本更新与内容优化,目前最新版本为2025版。
在船级符号与分级方面,CCS将智能船舶划分为六大功能模块,分别为智能航行、智能船体、智能机舱、智能能效管理、智能货物管理以及智能集成平台。
当船舶各项功能均符合CCS智能船舶规范要求时,可授予智能船舶附加标志 i-Ship,后跟功能标志组合,如 (Ai, Ri, Nx, Hx, Mx, Ex, Cx, I)。
括号内的字母代表船舶实际具备的智能功能,并可根据技术发展进行动态更新。
其中,i- 为数字1、2或3,表示远程控制与自主操作的范围和程度,每艘船舶仅能选择一个对应数字;
x- 为可选功能补充标志,以一个小写字母表示一个功能,同一功能标志可含多个补充标志,彼此以逗号分隔。
具体功能模块包括:自主操作功能Ai,分为A1(锚地至锚地自主操作,远程监视,进出港及靠泊由船员或引航员操作)、A2(锚地至锚地自主操作,远程监视与控制,进出港及靠泊由远程控制站操作)和A3(泊位至泊位全自主操作,远程监视与必要时干预);
远程控制功能Ri,包括R1(主要功能由远程控制,船员应急接管)和R2(全远程控制,船上无船员);
智能船体Hx,含Hh(船体维护保养)与Hm(结构监测及辅助决策);
智能机舱Mx,包括M(基本功能)、Mm(主发动机视情维护)、Ma(辅发动机视情维护)和Mp(推进轴系视情维护);
智能能效Ex,含E(基本能效管理)、Es(航速优化)和Et(纵倾优化与最佳配载);
智能货物管理Cx,包括C(货物监测、预警与辅助决策)、Cl(自动装卸货)和Cw(智能洗舱)。
除上述六大智能功能模块外,CCS规范还对智能化程度提出具体分级要求,涉及数据感知、分析评估、故障诊断、趋势预测、决策支持及自主响应等多个层面。
该规范还针对智能疏浚、智能科考、智能拖曳作业、智能铺排等专项作业应用制定了相应的符号标志与技术要求。
关于远程控制船舶,CCS明确了其基本定义与运行要求。
舶系指船舶能够被船舶之外的一个远程控制站或控制位置进行控制,实现船舶的运行与管理。
对于远程控制船舶的具体要求,主要包括远程控制站的功能配置、无线电通信和信号设备的配备规范、R1功能与R2功能的附加技术条件,以及检验试验过程中需要提交的各类图纸和文件资料,同时还包括初次检验和建造后检验的各项细则。
1 远程控制站
远程控制站作为船舶远程操控的核心单元,至少应具备航线规划、场景感知、状态监测、远程控制、与外部通信、向船舶发送航行信息、回放历史指令、货物监控、数据管理等基本功能。
对于仅具备R1功能的船舶,可适当降低功能配置,仅需满足场景感知、远程控制、通信、发送信息、回放历史指令等基本操作要求。
CCS规范中还对远程控制站的布置、系统设计原则、消防设施、供电系统、位置选择、环境条件、操作人员资质及管理制度等作出了详细规定。
远程控制站在进行软件升级或硬件更新时,必须重新进行系统检验与功能试验,确保其运行安全可靠。
1)控制台的布置应严格遵循人机功效原则,能够清晰显示船舶控制状态、航路信息、气象海况、船舶运动状态信息、警报信息等关键数据,以支持操作人员高效决策。
2)系统设计原则主要涵盖通信布置方案、数据服务器配置、人机交互界面设计要求,以及备用控制站的设置与切换机制。
3)远程控制站的位置选择需综合考虑电力供应的稳定性,远离危险场所和自然灾害频发区域,同时避开强磁干扰源、振动源和噪声源,以保障控制环境的稳定与安全。
4)远程控制站的电力供应系统应至少由来自不同变电所的两条独立电路供电,当一路电源发生故障时应能自动切换至另一路。
备用电源的容量需至少满足远程控制站12小时的用电需求,对于需要连续运行和操作的核心系统,应配备不间断电源(UPS),其供电时间不少于0.5小时。
5)远程控制站的人员配置应根据所控制船舶的数量合理确定,操作人员需持有船舶驾驶员适任资质,并熟悉系统的功能操作、日常管理和维护流程。
管理制度应涵盖人员配置标准、值班安排、岗位职责划分、控制程序、应急程序、维护程序以及安保措施等方面。
2 无线电通信与信号设备
无线电通信与信号设备方面的要求主要包括通信功能的具体技术指标、通信和信号设备的配备标准及其性能要求。
船舶在整个航行过程中需能够自动或通过远程控制站实现有效的语音与数据通信,并具备足够的通信带宽以保障信息传输的实时性与可靠性。
船舶的信号设备应能自动或在远程控制站的远程操控下,依据国际避碰规则的要求准确发出声、光和号型信号。
通信设备的配备至少应包括1台卫星船站、1台具备互联网数据通信能力的V-SAT船站、2台VHF无线电装置、1只卫星无线电示位标、1台海上安全信息接收装置以及远程识别与跟踪(LRIT)设备,且这些设备应安装在机舱以外的安全位置。
通信设备的运行状态应实时传送至远程控制站,并能够在远程控制站进行远程监控与操作。
信号设备需严格依据避碰规则的要求进行配置,桅灯、舷灯和艉灯应设置双套灯具或采用双灯丝灯具以提高可靠性。信号设备的状态信息需传送至远程控制站,并能够根据船舶所具备的功能模式,实现自主工作或在远程控制站的指令下进行远程操控。
3 R1功能标志的附加要求
具备R1功能的远程控制船舶,其附加技术要求主要集中在航行控制、轮机系统、电气设备、消防措施、锚泊操作等方面。
这些附加要求的核心在于确保在部分远程操控场景下的运行安全性与系统冗余能力。
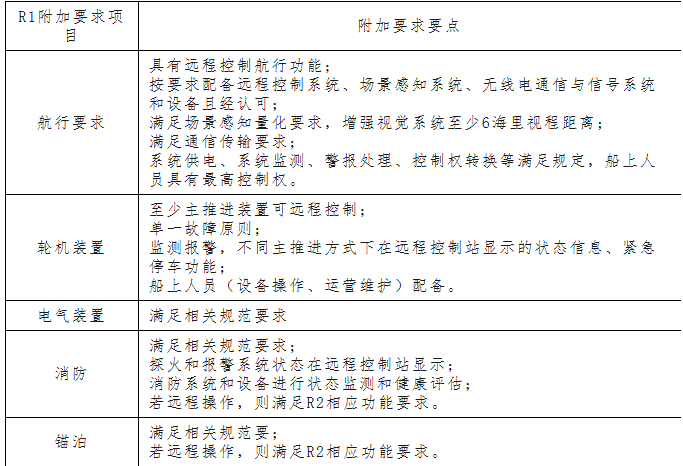
▲图源:网络,侵权必删
4 R2功能标志的附加要求
R2型船舶为完全无人在船的操作模式,所有船舶操作均通过远程控制站进行,其功能要求远高于R1型船舶。
在R1船舶的各项要求基础上,R2船舶在航行要求、轮机装置、电气装置、消防系统、环境保护、锚泊设备、船体结构安全、货物管理等方面进一步增加了适用于无人在船远程控制场景的严格技术条款。
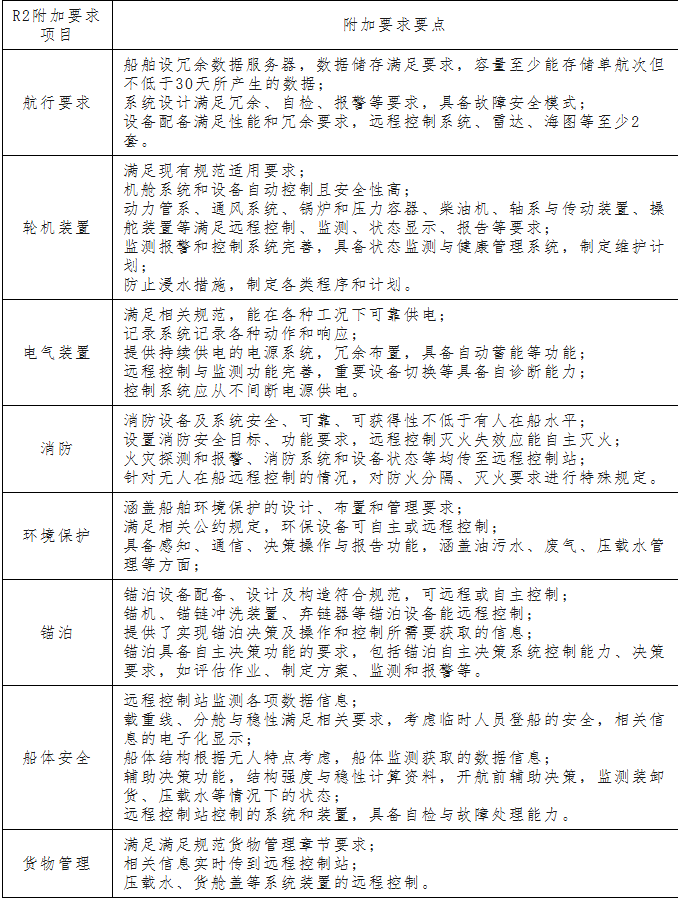
▲图源:网络,侵权必删
RS(俄罗斯船级社)
一. 船级符号和分级
俄罗斯船级社(RS)发布了《海上自主及远程控制水面船舶(MASS)入级规范》,旨在明确该类船舶在设计与建造过程中需遵循的技术监督要求及相关标准。
RS为对自主和远程控制船舶进行分类,引入了一套复杂符号体系,用以标识船舶在公海和封闭水域(包括受限水域、锚地及港口)中的控制能力。
相应符号包括MC、MCDS、RCMC、RC、AC等,分别代表不同的控制模式与运行条件。
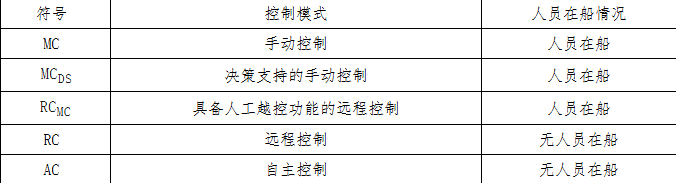
▲图源:网络,侵权必删
符号示例:AC-MC 表示该船在海上航行时可实现自主控制(AC),而在受限水域和进港时需转为手动控制(MC)。
二. 智能船舶的设计监督
在设计阶段,申请方需提交一系列技术文件供船级社监督审核,一般包括操作概念(ConOps)清单、风险评估报告、系统功能描述、网络安全方案、人机交互设计说明、故障应对策略以及验证与确认(V&V)计划等,以确保智能船舶的各项功能符合安全与可靠性标准。
MASS系统技术要求和运行安全程序等方面的规定,还对状态感知、无线电通信与数据交互系统、航行与操纵方法、船舶动力装置、远程控制中心以及网络安全等关键领域提出了详细的文件化要求。
在远程控制中心(RCC)方面,需提交的文件包括态势感知系统设备的设计文档,涵盖系统组成、技术说明、结构框图、操作手册和供电示意图等。
针对远程控制航行功能,还需额外提供航行控制系统功能图、系统说明文档、可靠性分析报告、系统示意图、设备布置图以及锚泊操纵方案等内容。
三、MASS及其系统的远程控制技术要求
RS规范从状态感知系统、无线电通信与数据交互手段、航行与操纵手段、船舶动力装置四个核心方面对系统功能提出了要求,其中每个方面均包含针对自主控制和远程控制的具体技术要求。
远程控制被定义为船舶的一种控制模式,其控制系统及技术手段部署在远离船舶本身的位置。
相关技术要求主要包括以下内容:
1. 状态感知系统中关于远程控制的要求
状态感知系统应能在所有运行场景下,将所获取和处理的信息实时传输至航行控制系统,并在必要时转发至远程控制中心(RCC)。
该系统至少需获取和处理的信息包括天气预报、实时气象数据、电子海图信息、MASS自身的运动与操纵状态、通信与警报信息以及周边环境动态等。
态势感知设备还应具备自我诊断与报警能力,在发生故障时能够及时向RCC发送警报。
特别值得注意的是,RS对状态感知系统中的船舶定位精度提出了明确的量化指标:
- 船舶定位系统应确保在95%置信度下的绝对精度;
- 在开阔水域航行时定位误差不超过100米;
- 在港口及沿海水域进行自主避碰和航行时误差不超过10米;
- 在港口区域内运行时误差不超过1米;
- 在自主靠离泊操纵过程中误差应控制在0.1米以内。
2. 无线电通信中关于远程控制的要求
MASS应在整个航程中直接或通过RCC实现与其他船舶、船舶交通管理系统(VTS)等主体的无线电通信及数据交换,并保证通信质量和传输效率。
规范中明确列出了船舶与RCC之间需交互的数据类型,包括环境信息、控制指令、设备状态监测信息及通信设备运行状态等。
远程控制船舶应配置至少两种采用不同技术的独立无线电通信方式。
当MASS与RCC之间的通信信号质量不足时,系统应能按优先级顺序保障航行安全相关数据的传输,优先级从高到低依次为:
.1 应急控制指令;
.2 船舶运行所必需的远程控制指令;
.3 支持远程控制关键功能的态势感知数据;
.4 监控数据;
.5 服务数据。
3. 航行与操纵中关于远程控制的要求
该部分主要围绕控制模式转换原则、MASS航行控制系统的配置与性能要求以及数据记录保存等方面提出具体规定。
例如,MASS应至少配备两套可热备份的航行控制系统。
自主控制、远程控制和驾驶台控制三种模式之间的转换需遵循以下原则:
- MASS的设计应确保在港内水域航行、系泊作业、进出港口等场景中具备自主或远程控制能力,或同时支持两种模式;
- MASS需具备在海上自主航行的能力,RCC在必要时可接管控制权;
在远程控制模式下,若通信条件不满足要求,系统应能自动切换至自主航行模式;
- 若MASS具备航行控制能力,需向RCC申请并获得批准后方可接管控制权,并在批准的控制时限结束后将控制权交还RCC。
4. 船舶动力装置中关于远程控制的要求
船舶动力装置的控制可来源于四个位置:机旁控制站、船载远程操控站、自主控制系统以及外部的RCC。
RCC与船载智能系统之间的控制权分配原则如下:
- 在正常运行条件下,RCC享有最高控制优先级,智能系统控制优先级次之;
- RCC可将控制权授予动力装置智能系统,并在智能系统发生故障时具备有效的远程接管能力;
- 在通信质量下降时,由智能系统实施控制;在通信可靠的情况下,RCC可优先通过智能系统进行控制。
四、远程控制中心
RS规范指出,远程控制中心(RCC)可以是固定设施也可为移动部署,其作为一个集成系统,应包括系统设备、所控制的海域范围、操作人员以及所管理的MASS船舶等要素。
SS系统、航行限制标志、备用远程控制中心(RCC)、消防安全系统以及入侵防护系统等关键设施。
针对远程控制中心(RCC)的具体要求,主要涵盖态势感知、航行决策管理、远程航行控制、电力供应、人员配置以及系统设计原则等多个方面,并在任务目标、性能要求和验证方法三个层面进行了系统规定,其中RS规范在这些方面制定了尤为详尽的技术和管理标准。
在态势感知方面,规范要求系统应具备全面获取航行环境、船舶状态及周边态势数据的能力,包括传感器数据的类型、精度和更新频率,并强调关键设备的冗余配置,以提升系统的鲁棒性。
RCC需依据实时、准确的态势信息,作出合理的控制模式判断与决策选择。
远程控制功能方面,RCC应支持制定航行计划与航线设计,实时监控船舶各类状态信息,具备与岸基、船端及其他相关方的语音与数据通信能力,支持信息发送与接收,并能够对货物装卸等作业流程进行有效监控与管理。
安全防护系统方面,RCC需配备完善的安全系统,以实现对授权及非授权访问行为的全面监控、异常检测、实时报警、应急响应和数据记录。
系统核心任务包括人员身份管理、权限控制、非法访问拦截、报警机制触发及操作日志存储等,以保障控制环境的安全可靠。
电力供应方面,RCC应配置不间断电源(UPS)和至少一套应急电源,关键独立设备可配备专用不间断电源。
此外,还需综合考虑RCC内部环境条件、照明系统、火灾报警及其他辅助设施的电力支持,确保持续稳定供电。
人员配置与管理方面,规范对RCC岗位设置、资质要求及任职经验等作出了详细规定。
所有人员须持有效的资质证书,并具备一定年限的实际海上资历和模拟器训练合格证明。
RCC应根据人员编制表和所控制的船舶数量合理配置岗位,其人员结构、资质体系及管理流程均需提交检验文件备案。主要岗位包括:
- 船长(职责相当于实船船长);
- 操作员/值班员(资质不低于大副,属管理级);
- 机械工程师(资质相当于轮机长,属管理级);
- 操作员/值班员(资质不低于二副,属管理级);
- 通信工程师(资质相当于电子员,属管理级);
- 医生(根据实际需要配置)。
在各船级社的内容对比分析中,可总结如下:
1. 符号等级体系方面
各船级社针对智能船舶均建立了分类分级体系,其分类方法、级别数量和侧重点存在差异。
部分以常规船舶功能为核心,部分侧重船上是否有人,还有船级社考虑了控制位置的不同。
整体上,分类分级趋势呈现从低到高、自主化与无人化程度逐步提升的特点。
DNV采用功能-模式-位置三维符号体系,船舶的自主与远程控制功能在该体系下组合配置,并强调所有操作模式下均需保留人员介入的可能性。
LR将自主等级划分为AL0至AL6共7级,涵盖从完全人工操作到无人监控的全自主运行船舶,明确了不同等级下人员的决策与执行权限。
ABS基于“自主(AUTONOMOUS)”和“远程控制(REMOTE-CON)”两大核心符号,从功能(共11项)、监控水平和风险等级三个维度进行区分,以适应智能船舶在功能与控制方式上的多样化需求。
BV以“SMART (Xx)”表示智能系统功能,将自主等级划分为A0至A4,并区分船上直接控制与远程控制两类控制形式,形成功能─自主等级─控制等级的组合体系。
CCS采用“i-Ship”符号标识智能船舶,依据航行、船体、能效等智能化功能应用进行分类,并在各类功能中结合航行水域与人员参与程度进行等级划分。
RS则根据船舶航行水域(如公海与封闭水域)区分控制能力,将自主运行等级从完全人工操作到完全自主划分为5个级别。
各船级社的智能船舶符号体系围绕“功能复杂度”“人员参与度”“控制形式”和“应用场景”等核心要素构建,反映出其在智能船舶技术路径方面的差异化思路。
总体来看,智能船舶的分类分级主要考虑以下要素:
◆ 功能维度:如航行、机舱、安全、货物管理、能效管理等;
◆ 船上人员状态:有人在船与无人在船;
◆ 控制方式:有人直接控制、有人持续监督、必要时人员介入、无人监督运行等;
◆ 航行水域类型:如公海、港口水域、锚地水域等。
2. 远程控制要求方面
通过比较各船级社在远程控制方面的规范内容,可看出其分类思路、分级结构和文件体系存在一定差异。各船级社在功能要求与性能标准的详略程度上也有所不同。
总体而言,LR的指南偏向宏观原则性要求,而DNV、ABS和BV的规范内容较为全面,部分条款具备可量化的指标。
当前各船级社在远程控制船舶方面的技术要求存在一定差异,尤其在控制权配置和远程控制中心人员的要求方面呈现多样化的特点。
在控制权方面,部分规范要求预设控制权等级后无需额外确认,也有部分要求必须经过批准程序方可生效;
一些规范明确船上必须始终有船员随时准备接管控制,还有一些则规定当船上有人员在船时,应赋予其最高控制权限。
在远程控制中心人员方面,由于涉及船旗国主管机关的管辖范畴,部分船级社未作具体规定,而另一部分则提出了较为细致的管理和资质要求。
除了上述差异和不同的侧重点之外,各船级社在远程控制船舶的技术要求中仍体现出较多的共性特征,主要包括等效安全原则、通信冗余设计、对网络安全的重视、基于风险的可接受准则、应急处置机制的强调以及测试验证的要求等。
这些共性内容反映了行业在推动智能船舶技术时的共同关切与基本共识。
以下表格展示了各船级社在技术要求方面的总体概况。
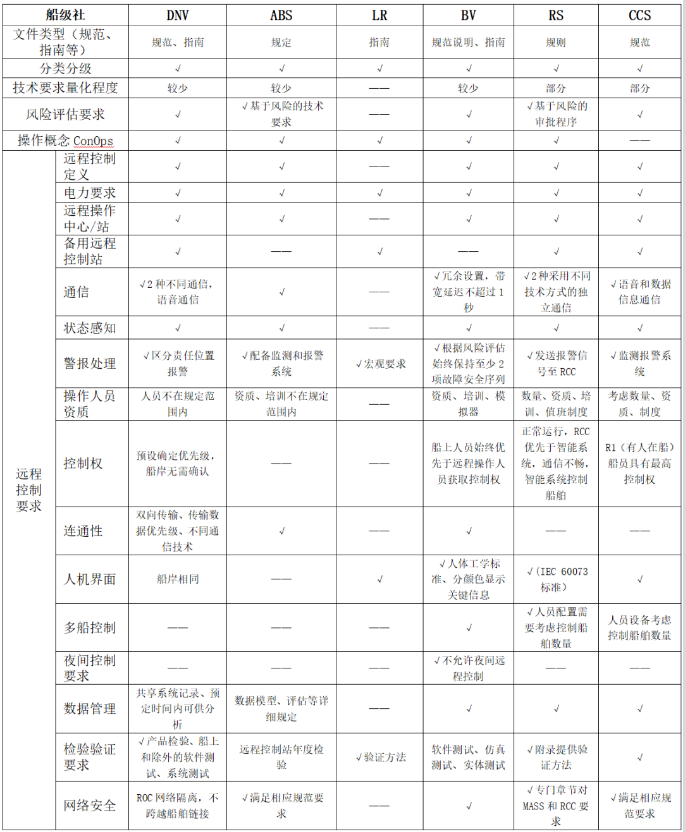
▲图源:网络,侵权必删
在远程控制船舶的技术规范构建中,主要原则的确立尤为关键。
由于自主与远程控制技术仍处于发展阶段,尚未形成完全成熟的技术路径和统一的描述性条款,因此各船级社的相关要求大多建立在以安全为底线、功能为导向、风险可控为核心的原则基础上。
通过冗余设计、回退机制和网络安全防护等技术手段,结合人员参与程度的不同安排,既鼓励技术创新的灵活性,又通过系统性规范确保远程控制的安全与可靠性。
具体而言,这些原则包括:
(1)等效安全原则。
智能船舶应保持不低于传统船舶的安全水平,不因智能技术的引入而降低安全标准。在设计与运行中需通过冗余配置和故障监测等手段,有效控制智能系统可能带来的风险。
(2)基于风险的方法与缓解措施。
在智能船舶的设计、建造及运行过程中,需通过系统性的风险评估识别各类潜在风险,并据此制定具有针对性的测试验证方法和风险控制举措。
(3)功能导向。
技术要求多以目标与功能为核心,而非限定具体技术参数,从而为技术路径的选择提供灵活性,支持持续创新与迭代升级。
(4)回退机制。
智能系统需具备在故障或异常情况下可靠退出或切换的能力,包括自动启用冗余设备、进入备用模式,或触发人工干预等预设安全策略。
(5)冗余设计。
对通信、主推进装置、关键传感器及电源等关键系统与设备实施冗余配置,支持热切换,以避免单点失效导致系统功能丧失。
(6)单一故障原则。
要求任一独立故障不应造成船舶丧失安全运行能力或引发重大事故。
(7)人员参与程度。
根据控制模式与人员位置的不同组合,明确人员在环路中的角色,平衡自动化与人工干预之间的关系。
(8)网络安全。
必须防范因系统智能化和网络化带来的安全威胁,采取包括物理隔离、加密认证、入侵检测与定期更新在内的综合防护措施。
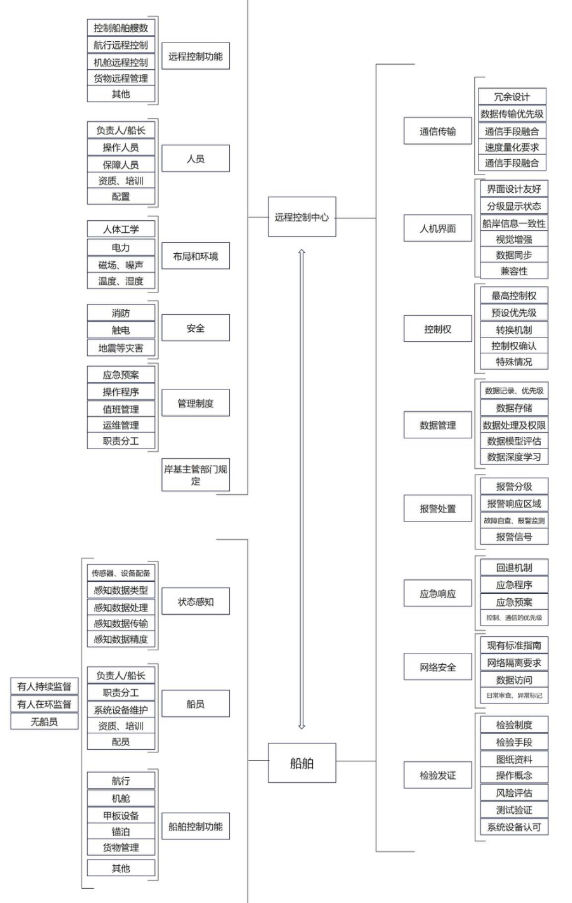
基于上述原则及对各类船级社规范的分析,本文从宏观架构出发,围绕远程控制中心与受控船舶两大主体,梳理出远程控制船舶技术规范的要点体系。
共性要求涵盖通信传输、人机交互与控制权等八大模块;
远程控制中心需额外包括远程控制功能、人员配置与管理制度等五大模块;
受控船舶则需根据船员在船与否的不同状态进一步明确控制功能与状态感知等三大模块。
总体架构及细分内容如下图所示。
▲图源:网络,侵权必删
结语
部分将通过对各船级社在远程控制船舶技术规范方面的比较分析,总结当前技术发展的共性与差异,为后续标准统一与技术推进提供参考。
控制船舶的要求,总结了船舶远程控制需考虑的主要原则,初步形成了远程控制船舶技术规范的要点与总体框架。
然而,在这一领域仍存在诸多尚未充分探讨或可能存在疏漏的方面,比如船舶航行水域的差异性、复杂运行场景的影响,以及远程控制与自主系统之间的交叉与协同问题,这些都是确保船舶整体安全可靠运行所必须面对的关键议题。
智能船舶本身即为一项复杂的系统工程,进一步考虑到船舶控制位置的不同、控制系统的多样性、运行模式的差异以及人员参与程度的变化,再加上外部运行环境与条件的不确定性,使得整个系统的设计与实施更具挑战性。
因此,未来需要不断积累智能船舶的实践经验,持续推进关键技术的迭代升级,并加快完善相关政策与标准规范,从而为船舶智能化、远程化和自主化应用的高质量发展提供坚实支撑。

免责申明:本文来源机海务之家。仅代表作者观点,不代表中国海员之家立场。其真实性及原创性未能得到中国海员之家证实,在此感谢原作者的辛苦创作,如转载涉及版权等问题,请作者与我们联系,我们将在第一时间处理,谢谢!联系邮箱:cnisu@54seaman.com