 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库综述与述评 | 刁亚楠,赵国如,等:穿戴式步态失稳精准干预关键技术与挑战
点击蓝字 关注我们

刁亚楠
-中国科学院深圳先进技术研究院助理研究员,博士

赵国如
-中国科学院深圳先进技术研究院研究员,博士研究生导师


老龄功能退化与下肢功能障碍会导致步态失稳,而步态失稳是跌倒伤害最直接危险因素,会严重降低老年人的生活质量,并增加跌倒和死亡风险。穿戴式步态失稳精准干预技术是解决步态失稳危害的关键。然而,目前国内外失稳干预以单一通用技术为主,缺乏穿戴式、个性化和全流程的解决方案。基于此,文章将步态失稳干预全过程精细划分出5个阶段,综述了步态失稳机理、监测、预警、防护、康复训练和监护管理技术的发展现状,分析比较了国内外技术特点和差异性;总结了步态失稳精准干预技术发展面临的关键问题,并从基础研究、技术研发和政策扶持等方面对未来技术的发展规划提出了相关建议。
步态失稳(Gait Instability)指人体行走过程中出现的躯体失衡无法保持稳定的步态状态,典型表现为步态不稳、动作不协调,甚至行走困难等,轻则造成身体组织伤害,重则可能造成死亡。老龄功能退化与下肢功能障碍(神经/运动退行、髋膝置换、脑瘫等)会导致步态失稳,而步态失稳是跌倒伤害最直接危险因素。据统计,截至2025年底,我国60岁以上老年人口总数超3.2亿,而步态失稳综合发生率约35%,70岁以上老年步态失稳发生率超50%。步态失稳会严重降低老年人生活质量、并增加跌倒和死亡风险,给我国每年造成超千亿元的经济负担。因此,开展步态失稳精准干预技术研究,对我国养老健康发展具有重要意义。
步态失稳干预过程划分及干预思路
1.1 步态失稳干预过程划分
人体步态稳定依赖躯干、臀部和脚踝等关节间的灵活调节控制,受到肌肉无力、关节问题、运动迟缓、协调性差等损害的挑战。传统上,步态失稳被划分为“滑”和“跌”两个阶段,这种划分方式过于简单粗糙,不利于失稳精准干预技术发展和个性化干预策略的制定。近年,随着国内外老年步态失稳防护技术成为热点,步态失稳阶段被划分成前、中、后3个阶段,干预技术向更精准、智能化方向发展。
过去10年,作者建立了近10 000例老龄神经/运动退行、髋膝置换、脑瘫等步态失稳人群数据库,深度探究了人体步态失稳发生期间的运动特征规律,将步态失稳干预过程划分成5个阶段:正常步态、失稳扰动、失稳变大、跌倒状态和康复训练(图1)。进一步,为预防和减少步态失稳危害,在失稳发生前,对存在失稳风险的人群进行监测评估;在失稳变大时,通过预警提醒使相关人群主动调整;当失稳过大无法自主恢复时,使用失稳防护设备减少伤害;最后对跌倒导致损伤的人群进行防失稳训练,帮助恢复和增强平衡能力。
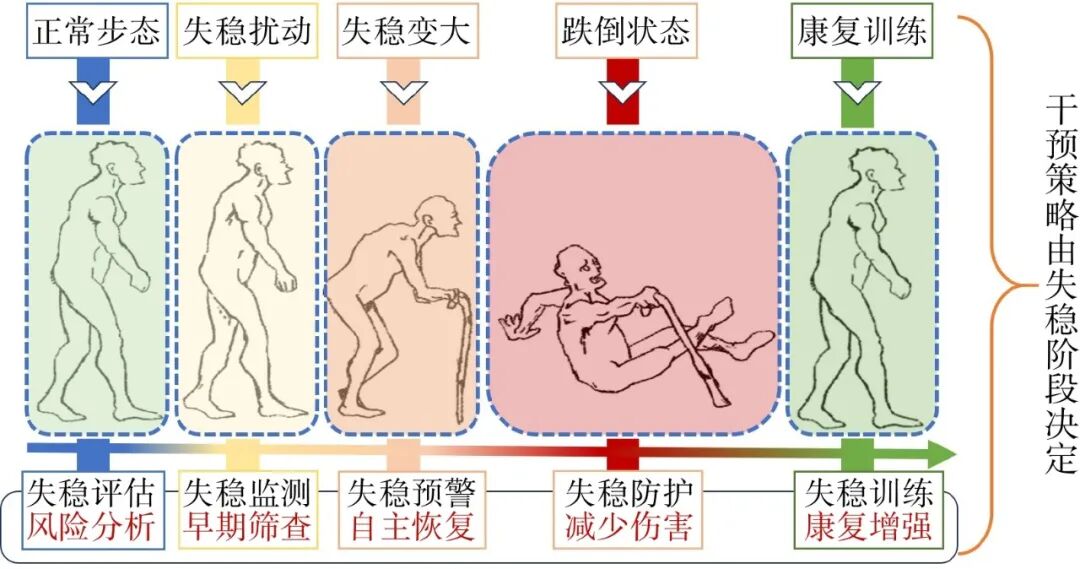
图1 步态失稳干预过程划分和精准干预策略
fig.1 Division of gait instability intervention process and precise intervention strategy
1.2 步态失稳全流程干预技术思路
当前,国内外步态失稳监测、评估和训练等干预技术以非穿戴式为主。例如,运动捕捉系统(VICON),可以跟踪反射标记的3D位置和生物力学模型解析步态特征,具有高精度和稳定性等优点。此外,其他商业设备,包括三维足底压力测力台、等速康复训练评估系统等,被广泛用于临床步态干预,但设备笨重且价格昂贵,难以在日常环境部署。而穿戴式技术具有低成本、便携式和长期使用等优势,成为步态失稳干预技术的发展趋势。近年,Nature、Science等发表了多篇穿戴式步态失稳干预技术的研究,充分表明该方向已成为当前国际研究热点。
然而,目前穿戴式技术的潜力远未被充分发挥,其应用尚处于碎片化状态,缺乏一个将干预环节有机串联、实现数据闭环与决策协同的顶层设计框架。为此,文章以穿戴式失稳干预技术为核心,提出“穿戴式步态失稳全流程干预技术思路”,围绕步态失稳机理、监测、预警、防护、康复训练和监护管理技术等(图2),对国内外相关产品及技术发展现状进行分析,旨在为步态失稳人群提供穿戴式、个性化、标准化、全流程的干预体系和应用解决方案。
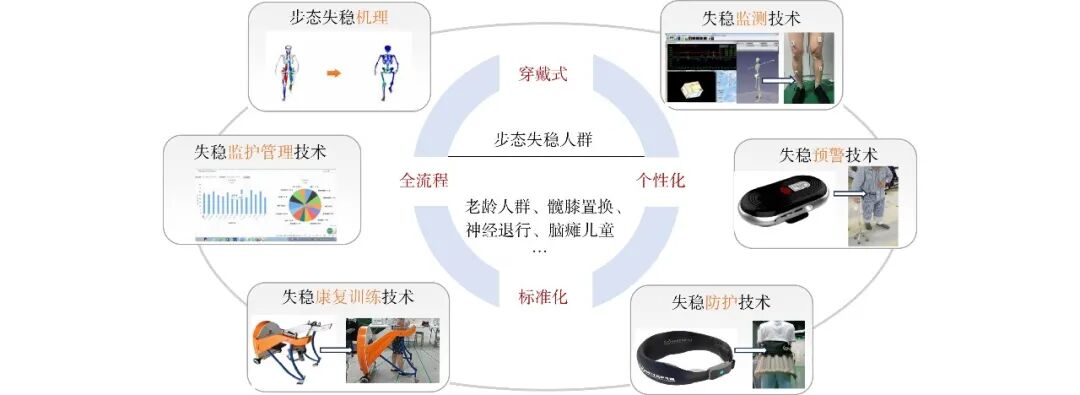
图2 构建步态失稳全流程干预技术链
fig.2 Whole-process gait instability intervention technology chain
穿戴式步态失稳干预技术发展现状
2.1 步态失稳机理
步态失稳的机理复杂,涉及中枢神经系统、肌肉骨骼系统、感觉系统、认知功能和外周神经系统的多重调节(图3)。步态失稳的原因可能简单源于年龄变化,也可能源于神经、骨骼、肌肉、感知、心理认知、循环和呼吸系统等特定功能失调或障碍。其中,神经系统性失稳主要特征为步态启动困难、步态节律失常等,常见于帕金森病的“慌张步态”、脑卒中后的偏瘫步态。肌肉骨骼系统性失稳呈现步速下降、步长缩短、关节活动范围受限等症状,诱发机制多为肌肉力量下降、关节退行性变等因素。感知系统性失稳表现为步宽显著增大、行走时目光固定于地面等特点,常源于本体感觉减退。认知功能性失稳典型症状为双任务条件下步态指标急剧恶化,多发于执行功能、注意力资源分配能力下降人群。
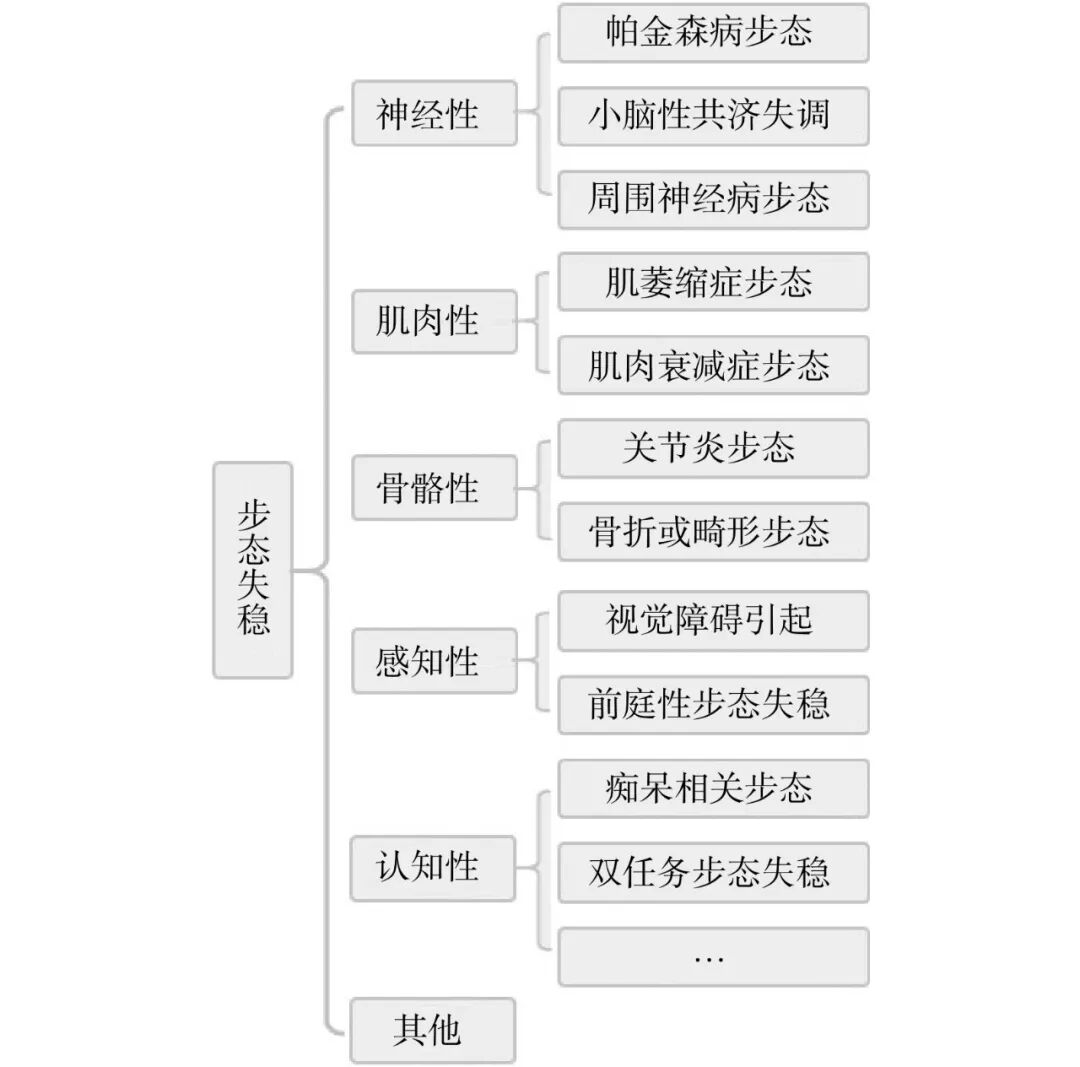
图3 步态失稳机理分类
fig.3 Classification of gait instability mechanisms
英国帝国理工学院Toderita等探究了全长铰接式假肢和缩短的非铰接式假肢对双侧经股骨/膝关节截肢患者的步态影响。通过比较两种类型的假体在步态过程中的截肢患者的肌肉骨骼功能和负荷,发现全长铰接式假肢显著提高了步幅、步行速度和髋关节的活动范围,可帮助截肢患者达到接近健全人水平的活动能力。然而,该假肢引入了更高的髋关节负荷和屈肌力量冲动,导致肌肉耐力下降和关节退化。该研究揭示了不同类型假肢对截肢患者步态的动态影响,并为优化假肢选择和预防潜在的负面生物力学影响提供了指导。
瑞士日内瓦洛桑联邦理工学院Milekovic等在对晚期帕金森病(Parkinson’s Disease, PD)患者步态不稳的研究中,开发一种闭环运行的神经假体。研究显示,该神经假体针对腰骶脊髓的自然时空激活,不仅在非人类灵长类模型中有效减轻了PD引起的运动缺陷,还恢复了其行走能力。在一名有30年病史的PD患者中,该神经假体与深部脑刺激、多巴胺替代疗法协同作用,显著改善了步态障碍,减少了步态冻结和跌倒。该研究揭示了通过脊髓调控改善步态不稳的潜力,为缓解帕金森病患者的运动缺陷提供了新的治疗途径。
法国卢森堡生物医学中心Talavera等通过深入探究神经炎症在神经退行性疾病中的作用,揭示了神经退行性疾病中炎症调节的分子机制。神经炎症反应与神经元损伤和细胞相互作用密切相关,而这些细胞对于维持运动控制和步态稳定至关重要。步态失稳在阿尔茨海默病和其他神经退行性疾病患者中较为常见,可能源于神经炎症导致的神经元功能障碍,特别是与运动控制相关的脑区受损。该研究揭示的炎症调节机制可能阐明神经元损伤和运动系统退化的过程,从而帮助解释步态失稳机理。此外,开发的新型生物标志物有望用于早期检测步态异常和干预,帮助延缓疾病进展和改善患者的运动功能。
美国哈佛大学Miyamoto等通过研究显性策略与隐性运动适应的相互作用,揭示了其在运动学习过程中的不同作用机制。研究发现,显性策略和隐性运动适应在关键运动维度中协同工作,但在非关键维度中相互抵消。隐性运动适应通过补偿显性策略中的噪声,有效减少了运动学习过程中由显性策略引发的低保真度问题。这些发现解释了为什么在技能学习过程中,隐性学习逐渐取代显性策略,有助于理解步态不稳等运动适应现象的潜在机制。
美国斯坦福大学Ulrich等通过分析骨关节炎患者行走过程中膝关节的三维力矩,发现多个力矩参数与骨关节炎的严重程度密切相关。基于这些力矩参数,研究开发了一个可靠的严重性指数,能够量化膝关节力矩与骨关节炎严重程度之间的关系。这为基于客观力学数据全面评估膝关节功能开辟了新途径,有助于更加精确地识别和监测骨关节炎导致的步态失稳。虽然该指数表现出较高的可靠性,但其有效性仍需进一步验证。
澳大利亚乐卓博大学Pearce等在头部受伤运动员、脑震荡后症状个体的运动研究中,通过评估退役接触性运动运动员的体感和皮质运动功能,以及分析持续性脑震荡后症状对体感和皮质运动系统的影响,揭示了反复脑震荡对运动能力的可能影响。研究发现,有脑震荡病史的运动员在皮质抑制和体感反应时间方面表现出显著异常,脑震荡次数与皮质抑制增加、体感功能受损之间存在线性关系。这为步态不稳的研究提供了新的视角,表明反复脑震荡可导致神经生理学上的异常,影响步态控制。经颅磁刺激和体感测量作为神经生理学评估工具,提供了评估头部外伤导致步态不稳的潜在生物标志物。
日本筑波大学Uehara等通过可穿戴混合辅助肢体(Hybrid Assistive Limb, HAL)受控机体探究了PD患者的运动功能障碍,揭示了步态障碍与中枢神经系统运动协调性丧失的关联。可穿戴的HAL受控机体为PD患者提供了步态干预方法。同时,开发了基于运动意图、生物电信号和动力学的控制方法,通过同步横向摆动和周期性力的调节,稳定步态并减少步态冻结发生。HAL装置能够通过周期调制与佩戴者步态同步,构建交互式生物反馈回路,改善PD患者的步态稳定性,为帕金森步态障碍的治疗提供了新的技术手段和理论依据。
北京航空航天大学樊瑜波团队提出一种基于多模态信息融合的创新方法(Sandwich Fusion Transformer for Image and Kinematics, SFTIK),对人体行为机制与功能评价研究具有积极贡献。该方法结合地形图和穿戴式惯性测量单元(Inertial Measurement Unit, IMU)数据,能够实时预测步态期间髋关节角度变化,实现了均方根误差为3.445°±0.804°,皮尔逊相关系数为0.971±0.025,表明其在大腿角度预测方面具有较高准确性,为步态失稳分析提供了新工具。
2.2 步态失稳监测技术
步态失稳监测技术主要用于检测和评估个体姿态稳定性,并预测跌倒风险,被广泛用于老年、神经系统疾病患者、运动员等需要姿态监测的人群。失稳评估的检测方法可以分为主观评估和客观评估两大类。主观评估包括PD评定量表、共济失调评定和评估量表、阿尔茨海默病评估量表、扩展残疾状态量表、流动性评估工具及步态动态指数等。上述方法具有简单、低廉、便捷等优点,但在有效性、可靠性和响应性等方面存在争议。各种步态参数分析(时空、运动学和动力学测量)的仪器化设备可以提供精确的步态模式和特征变量,为临床医生提供客观支持。同时,随着可穿戴传感系统和相关计算模式的迅速发展,老年运动及健康监测的质量不断提高。
瑞士苏黎世联邦理工学院Wu等开发了一种基于简化支持向量机(Reduced Support Vector Machine, RSVM)和有限状态机(Finite State Machine, FSM)的新算法,提升了可穿戴设备实时检测步态阶段的能力,尤其适用于受限硬件环境。该算法大幅减少了模型大小和计算时间,并通过FSM纠正预测误差,确保步态阶段检测的准确性和可靠性。其在自由生活环境中的高准确度、灵敏度和特异性表现,为步态失稳评估提供了一种有效、实时的解决方案,有助于神经系统疾病和临床康复中的步态早期障碍诊断。
美国约翰霍普金斯大学的Vignos团队通过可穿戴传感器和机器学习算法识别和量化身体疲劳的严重程度,目标是为作战人员预测肌肉骨骼(Musculoskeletal System, MSK)损伤风险并采取预防措施。研究团队通过整合肌电图、运动学和心率等数据,开发了能够识别疲劳状态的算法,并将其扩展为量化疲劳的评分系统。该系统可用于评估疲劳与MSK损伤的关联,提供个性化的干预措施,为军事任务中的运动问题提供了预防性解决方案。
日本千叶大学Kokubu等开展了生物信息监测和家庭康复护理机器人方面的研究。通过在移动机器人上集成非接触式传感器,实时捕获目标对象的姿态和步态信息,实现了无创的步态失稳评估。结合传感器数据分析,系统能够识别个体的日常活动意图和步态状态,并通过致动器提供安全支撑,降低失稳风险。该技术可在家庭环境中动态监测个体,并通过反馈机制优化康复和护理过程,为个性化干预提供支持。
中国科学院深圳先进技术研究院赵国如团队基于无线传感器网系统,通过跳频自组网网络协议实现高频数据传输,确保步态失稳捕捉的时间精度达≤10 ms;采用星型时隙分配技术,提高传输效率并降低错误率至1%以内;使用低功耗芯片和传感器,降低节点能耗至35 mW以下。通过传感器校准和多传感器融合算法,消除噪声并计算步态参数,成功将步长、步速和步态周期的误差控制在5%以内,为步态失稳评估检测提供了高精度、低功耗的解决方案。
北京科学技术研究院马英楠团队成功开发了一种创新的老年人跌倒风险评估方法。该方法通过优化二维动态步态稳定性分析,重新定义了冠状面的稳定边界,并结合矢状面的动态稳定性参数,提出了计算二维稳定域的新策略。该方法不仅提高了对老人步态稳定性分析的准确度,还为跌倒风险的早期识别和干预提供了科学依据。成果不仅有助于指导老年人进行有效的康复训练,还促进了相关防护产品的设计优化,极大提升了智慧养老服务领域的整体水平,对降低老年人跌倒风险、提高生活质量具有深远影响。
综上所述,步态失稳监测技术正从临床量表、实验室仪器分析向基于可穿戴传感器的实时、动态评估快速发展。当前研究的核心在于结合多传感器融合与机器学习算法,从时空参数、节律性、复杂度等多个维度量化步态稳定性。然而,目前多传感器系统间的标准与验证体系尚未统一;在复杂、非结构化的日常生活场景中的鲁棒性和普适性仍有待提高。如何将多维数据提炼为临床医生和患者可直观理解的个性化风险指标,是实现广泛临床应用的关键。
2.3 步态失稳预警技术
步态失稳预警技术是一种可以通过语言、振动等方式,在危险动作发生或者失稳过大时向用户发出预警,以提醒用户通过自身调节平衡减少跌倒发生的技术。区别于传统跌倒报警技术,失稳预警技术在跌倒前进行预警,能够增强老人维持身体自身平衡的控制能力,有效避免跌倒造成的伤害。
美国伊利诺伊大学Hsieh和Sosnoff展开了智能手机加速度计在评估多发性硬化症(Multiple Sclerosis, MS)患者姿势控制方面应用的研究。该项研究表明加速度计在均方根和置信度(95%)的椭圆加速度方面的可信度较高,因此加速度计可用于区分使用辅助设备和非辅助设备的MS患者。该研究使智能手机加速度计作为一种经济、便携的工具来评估MS患者姿势控制,帮助患者自我监测和预警,从而降低跌倒风险,是MS患者自我管理和跌倒预警的有力工具。
美国亚利桑那州立大学Lockhart等基于IMU收集了171名社区老年人的步态数据,并从中提取步频、步态等线性和多重分形熵、重构相空间分析等非线性特征。随后使用127名参与者的数据训练模型,将步态特征输入随机森林分类模型,并使用剩余44名参与者的数据进行测试。结果显示,结合线性与非线性步态特征的随机森林模型在测试中实现了81.6%±0.7%的准确率、86.7%±0.5%的灵敏度和80.3%±0.2%的特异性,显著提高了跌倒风险的预测能力。该研究通过短距离步行测试和穿戴式IMU,实现老年人跌倒风险识别,为跌倒风险评估提供了新的方法,并为跌倒预防干预、失稳预警等方面的研究提供了依据。
美国西弗吉尼亚大学Keaton等开发了一种基于Wi-Fi的家用跌倒预警系统(WiFi-based In-home Fall-detection Utility, WIFU)。WIFU系统由信息收集和处理及用户界面两个主要子系统构成,信息收集和处理系统使用Raspberry Pi微型计算机和两个天线收集信道数据,并将其传输至深度神经网络模型进行跌倒检测;用户界面则通过触摸屏显示,允许用户进行系统设置、添加紧急联系人及查看跌倒记录等操作。该团队收集了1 450个跌倒检测数据集,包含20种日常活动和16种跌倒类型,基于TensorFlow框架的Keras API进行深度神经网络模型的测试,利用Wi-Fi信道状态信息监测用户状态,并通过深度神经网络模型区分日常活动和跌倒事件。该共性技术可用于开发更精确、更实用的家用跌倒预警系统。
英国伦敦玛丽女王大学的Li等针对失稳过大预警问题,提出一种基于超宽带(Ultrawideband, UWB)模块DWM1000的通信集成感知和通信系统FallDR。FallDR利用UWB信号的高分辨率和抗多径特性,通过双面双向测距技术获取跌倒轨迹数据,并采用1D卷积神经网络模型进行危险动作检测与识别。FallDR通过测量标签与基站间的距离变化,获取跌倒轨迹检测信息,准确率能接近100%。此外,FallDR对环境变化、干扰、距离和方向变化具有高度的鲁棒性,即使在新的环境中测试,也能保持近100%的准确率。FallDR适用于智能家庭环境中的跌倒监测系统,为老年等易跌倒人群提供及时有效的保护。
中国科学院深圳先进技术研究院赵国如等研发了国内首个开展医疗器械注册的跌倒/失稳预警器。该预警器可穿戴在腰部,采用下肢多关节同步运动的步态失稳精准感知与监测技术,能精确捕捉和分析步态的细微变化。同时,预警器采用基于质心偏移和深度学习的失稳预警方法,可以实现跌倒前精准预警。该预警器突破传统失稳监测场景受限、失稳早期预警难的问题,能准确识别10种以上易跌倒危险动作,准确率高达93%,可实现失稳人群失稳动态监测、早期预警和自主平衡调节。
香港中文大学嵌入式人工智能与物联网实验室(AIoT Lab)研发了用于阿尔茨海默病检测的多模态人工智能(AI)系统,该系统基于热成像智能分析,不仅能进行跌倒预警,还能检测老年痴呆。美国加利福尼亚大学与SpeedyAI公司联合研发了一种基于机器学习的多目8摄像头跌倒检测系统,该系统通过分析跌倒模式,使用低成本单板计算机进行机器学习和规则制定,可区分失稳跌倒和日常活动,并通过传统可用的监控系统进行预警。
总体而言,步态失稳预警技术的关键在于预测的准确性与预警的及时性。研究已从基于简单阈值的判断,演进为利用非线性特征和深度学习模型的复杂预测。降低误报率以避免用户“预警疲劳”,实现超早期预警以留出足够的自主调节时间,以及将实验室高精度算法有效适配到计算资源有限的边缘穿戴设备是未来技术关键。
2.4 步态失稳防护技术
步态失稳防护技术是一项针对于特殊易失稳人群的技术,当特殊人群失稳过大而发生跌倒情况时迅速触发保护机制,为用户提供保障。该技术能够在用户跌倒触地之前,为其提供即时保护,以尽可能降低跌倒带来的损伤,是一种主动防护的跌倒安全解决方案。
日本千叶大学Tamura等开发了一种可穿戴式气囊,集成了加速度计与陀螺仪传感器。其跌倒检测算法使用加速度计和陀螺仪传感器,采用阈值技术,基于16名模拟跌倒的受试者的加速度波形数据开发。该算法能够在跌倒前300 ms检测到跌倒信号,触发气囊充气至2.4 L容量。气囊通过准确捕捉用户跌倒信号,并且能够在跌倒发生前充气,有效地吸收冲击并减少对人体的冲击。该研究开发的可穿戴式气囊为预防跌倒伤害提供了一种新的解决方案,气囊具备自动充气和便携性等特点,尤其适用于老年等易跌倒人群。
香港中文大学Shi等开发了一种基于微机电系统(Microelectromechanical Systems, MEMS)和嵌入式支持向量机(Support Vector Machine, SVM)分类器的移动人体气囊系统。该系统由微型惯性测量单元、机械气囊部署系统和嵌入式数字信号处理(Digital Signal Processing, DSP)系统组成,使用IMU记录人体运动信息,基于SVM训练将跌倒和其他运动分类,并嵌入DSP系统实现实时跌倒检测。其气囊机械触发器的响应时间为0.133 s,为气囊充气提供了足够的时间。该系统在测试中表现出色,证明了其作为实时跌倒保护装置的可行性,为老年人跌倒预防提供了新的思路。
中国科学院深圳先进技术研究院赵国如团队发明了一种髋臀一体化防护囊体结构。现有髋部防护气囊存在佩戴沉重、舒适性差、防护效果不佳和价格高昂等缺陷。该团队基于压力角优化和刺针正弦规律推程方法,设计并研制出可自动复位的低阻尼刺针−弹簧耦合结构、双凸轮传动部件和微型双气瓶同步充气模块,实现了微机电快速充气。同时,采用仿生设计,并建立了髋部−囊体着地缓冲模型,研发出髋臀一体化防护囊体结构,该囊体结构弹开速度快,防护面积广,着地缓冲能量吸收能达到83%以上,且该防护囊体成本低,能快速响应为用户提供及时保护。
湖北航天化学技术研究所的屈纯等发明了一种防护气囊衣,其包括衣服本体、跌倒检测控制模块、气体发生器和安全气囊等。当使用者产生跌倒动作,检测控制模块将收集到的失稳跌倒信号转换为预警信号,气体发生器与跌倒检测控制模块连接,接收预警信号并产生气体用于迅速填充安全气囊。该防护技术使防护气囊在发生危害性动作时,快速响应充气,包裹人体髋关节等部位,在使用者跌倒触地时最大化减轻人体受到的冲击。
此外,美国Active Protective公司开发出穿戴式腰带安全气囊,探索老龄失稳防护的产品化方案;以色列初创公司Hip Hope发明了气囊减震腰带,该产品已在美国、欧盟、加拿大和日本申请专利,获欧盟CE(Conformité Européenne)认证批准,被美国食品药品监督管理局列为一类医疗器械;苏州衣带保智能技术有限公司和广州信安智囊科技有限公司等也开发了失稳防护气囊等相关产品。
总体而言,步态失稳防护技术已从传统的被动护具发展到基于实时跌倒检测的主动气囊系统。当前研究重点在于提高检测算法的准确性和响应速度,优化气囊的充气机制和结构设计以提升保护效果和穿戴舒适性。然而,该领域仍面临三大挑战:一是如何在极短时间内(通常<500 ms)实现高精度跌倒识别并完成充气,平衡灵敏度与误报率;二是如何设计更符合人体工学、轻便且不干扰日常活动的防护装置;三是如何降低成本以提高普及率,并推动相关产品通过严格的医疗器械认证。
2.5 步态失稳康复训练技术
步态失稳康复训练技术是一种旨在帮助步态障碍患者恢复或改善步行能力的技术,能降低跌倒风险,提高生活质量,同时减少因步态障碍引起的并发症和医疗成本。该技术通常包括物理治疗、作业治疗和使用辅助器具。物理治疗指的是通过特定的运动训练来增强肌肉力量、改善关节活动度和平衡能力;作业治疗能够帮助患者在日常生活活动中提高行走的安全性和效率;辅助器具,如拐杖、助行器等,为患者提供额外的支撑和稳定性。
美国哥伦比亚大学Adeniyi 等开发了一种名为mTPAD的移动式骨盆辅助设备,用于对老年人进行基于干扰的平衡训练(Perturbation-based Balance Training, PBT))。该研究团队进行了一项随机对照试验,发现使用mTPAD进行一次PBT可以显著提高老年人的认知功能和平衡能力,并增强他们的主动活动信心。该研究成果为开发新的功能性康复技术提供了新的思路,可以帮助老年人恢复或增强平衡能力,预防跌倒。
美国卡内基梅隆大学He等开发了实时人机远程操作系统,该系统通过摄像头捕捉人体的运动轨迹,并利用先进的姿势估计算法,将人体运动数据转化为机器人可以理解的指令。这使得机器人能够实时模仿人类的动作,包括行走、跑步和跳跃等,并能够根据人类的运动意图进行调整和优化。这种实时人机交互技术,为中风患者等步态失稳人群的康复训练提供了新的可能性。该系统还可以用于评估康复训练的效果,并实时调整训练方案,通过对比患者康复前后的行走数据,评估康复训练对患者步态的影响,并根据评估结果调整训练强度和方案,提高康复训练的效率和效果。
哈佛大学Quinlivan致力于软体外骨骼技术在健康人群和社区中风患者步态康复中的应用研究。通过实验、系统表征和建模工作,深入分析了软体外骨骼的设计、控制和功效,提出一个改进的增补因子模型,用于预测外骨骼的代谢效益;此外,还设计并开发了一种轻量级、自主的踝关节外骨骼,用于社区中风患者步态康复,并通过初步评估证明了其有效性和潜力。该研究成果为软体外骨骼技术在改善步行效率和步态康复方面的应用提供了重要的理论和实践基础。
中国科学院自动化研究所侯增广团队研发了一种创新性下肢康复机器人。该机器人采用模糊逻辑技术,可动态调整运动阻抗,能够精准地适应患者的运动意图,这不仅保证了训练过程中的安全性,避免患者与机器人之间的过度对抗,还为患者营造了更加舒适和高效的康复环境。此外,该团队还设计了间接自适应模糊控制器,以确保机器人能够稳定地追踪患者的期望运动轨迹,从而显著提升康复训练的效果。该研究成果对于下肢康复机器人在步态康复中的应用推广具有重要意义。
北京航空航天大学陈殿生团队致力于康复机器人和护理机器人等方面的研究,设计并开发了一种新型的串联−并联混合式步态康复训练机器人(SHG Robot),旨在解决老年人行走障碍和平衡问题。该机器人拥有10个自由度,可以实现三维步态训练,并更自然地模拟日常行走,包括平地行走、上下楼梯和上下坡等动作,可以有效降低脚踏板的高度,减轻患者恐惧感,使患者更愿意接受康复训练。
综上,步态失稳康复训练技术正朝着智能化、个性化和家庭化的方向发展。从固定的大型康复机器人到可穿戴的轻量级外骨骼,技术不断迭代以提供更自然、更适配患者需求的训练。核心进展体现在人机交互的柔顺控制、基于生物反馈的实时调整和远程监控与指导。该技术面临的主要挑战包括:如何使设备在提供有效辅助的同时避免“习得性废用”,即促进患者自身神经肌肉功能的重建而非替代;如何利用有限的传感器信息准确识别患者运动意图;如何通过定量评估训练效果并动态调整训练方案,实现闭环康复。此外,设备的可及性和成本也是制约推广的主要因素。
2.6 步态失稳监护管理技术
步态失稳监护管理是针对不同失稳人群、应用场景或康复阶段的个性化干预技术。通常,全流程、智能化的步态失稳防控体系,需要持续、高效、科学的步态失稳监护管理,包括监测、预警、防护、评估、训练、分析和反馈等多个方面。全面、系统地降低步态失稳(跌倒)风险,提高步态失稳人群的步态控制能力,减少跌倒风险及降低跌倒伤害、进而减轻社会医疗负担。
目前临床医学的步态失稳/跌倒管理,普遍依赖问卷调查、临床护理及宣传教育等手段。加州大学洛杉矶分校大卫格芬医学院的Ganz和Latham在New England Journal of Medicine的论文提出,询问患者过去1年的跌倒情况以确定未来跌倒的高风险人群(失稳人群),从而制定更好的防跌倒/失稳管理策略。四川大学华西医院老年医学中心的谢灵灵等提出多维度护理防跌倒培训方法,研究是否能有效改进护理人员对患者跌倒的临床管理能力,使其能够为老年患者提供更加安全的护理。复旦大学附属华山医院沈周等提出康复管理结合运动疗法的个体化康复训练对PD患者步行和平衡运动功能的改善有很好的疗效。
传统的失稳管理能够直接面对患者进行评估及护理、指导。然而,传统方法对患者的实时监测不足、人工护理效率较低,难以对患者病情进行长期跟踪和评估。随着可穿戴设备和智能传感技术的进步,实时监测和大数据分析决策将成为核心手段。中国人民解放军总医院皮红英等联合长城网,基于sringboot 系统框架研发并推广了老人失稳/跌倒防控信息化平台,集成失稳/跌倒在线测评系统(评估端)、防跌倒医护平台(医护端)、风险综合管理端(老人端),支持180万人次/h并发运行,通过融合医护患失稳防治技术实践方案,建立智能决策模型驱动的步态评估和康复训练干预系统,实现15万人及以上规模失稳在线教育培训、评估和干预智能化管理。
中国科学院深圳先进技术研究院赵国如等利用epoll高并发通信和redis高速缓存等技术,研发了远程步态失稳监测综合管理平台,实现对失稳预警器、失稳监测鞋、失稳防护腰带、防失稳训练外骨骼等穿戴设备的高并发互联互通和远程失稳管理,高效、自动地实现了上述设备的异构数据汇聚和关键失稳数据远程捕获分析,通过大数据和AI对步态失稳预警、防护、训练进行全周期监测,实现远程运动追踪、室内外精准定位、危险事件即时预警推送、个性化干预策略生成等功能。
以上研究利用物联网、云服务器和大数据技术实现了步态失稳远程综合管理。然而,不同医院、社区、居家的干预设备、管理系统接口协议不统一、封闭,容易形成“数据孤岛”,难以跨省市大规模、持续地进行失稳综合监管;远程数据挖掘、失稳危险因素分析和事件推送等高级应用尚存在较大差异。因此,步态失稳远程管理技术将更加注重解决步态失稳管理的数据、协议、评估和分析标准化,以及新老系统的兼容性对接。此外,AI 全流程管理技术将在步态失稳数据的精准分析、个性化干预方案制定和实时预警中发挥关键作用。
总体来看,步态失稳监护管理技术正从分散、人工的传统模式向集成化、智能化、远程化的平台模式演进。当前研究集中于利用物联网、云计算和人工智能技术,整合多源数据,实现跨场景的连续监测与个性化干预。然而,该领域的发展受制于以下3方面:一是“数据孤岛”问题,不同设备与系统间的数据标准、接口不统一,阻碍了信息融合和大规模应用;二是数据隐私和安全问题;三是如何将临床知识与AI模型有效结合,提供既科学又可解释的决策支持。未来,构建开放、标准化、安全可靠的智能监护管理生态将是重点方向。
挑战和建议
3.1 挑战
(1)失稳机理的人群异质性与量化表征困难。步态失稳并非单一病理现象,其诱因涉及神经、肌肉骨骼、感知、认知等多系统交互。当前研究多聚焦于单一病种或老龄人群,缺乏跨人群(老龄、脑瘫、帕金森病、脑卒中、髋膝置换等)的大样本、多模态纵向数据支撑,导致失稳机理的共性规律与人群特异性边界不清。同时,现有肌骨模型多为静力学或准静态分析,难以刻画真实动态失稳过程中的非线性、时变特征,制约了个性化失稳风险预测模型的精度与泛化能力。
(2)失稳监测−预警−防护−训练技术集成不足。当前监测、预警、防护、康复训练等技术多呈碎片化发展状态:监测设备与防护设备独立开发,预警算法与康复策略缺乏数据互通,导致形成“数据孤岛”与“决策割裂”。全流程闭环干预的系统级设计尚未成熟,多传感器融合的异构数据协同处理能力不足;边缘计算与云计算的分工边界模糊;预警−防护的时序衔接仍存在ms级响应瓶颈;康复训练缺乏与日常监测数据的动态闭环反馈。此外,设备的舒适性、续航、成本、美观性与临床效能之间的平衡尚未得到很好解决,直接影响用户长期佩戴依从性。
(3)个性化全流程穿戴式失稳管理体系缺失。目前穿戴式步态干预技术缺乏统一的性能评估指标体系与临床验证范式。传感器精度、算法灵敏度/特异性、防护响应时间和康复训练效果等关键指标尚无国家或行业标准;不同研究采用的数据集、实验协议和评价指标各异,导致技术性能难以横向比较。此外,步态失稳的全程管理依赖设备互联、数据互通、服务协同,但当前不同厂商设备接口协议不统一,医院、社区、居家系统封闭独立。如何构建个性化全流程穿戴式失稳管理体系仍是目前的主要挑战。
3.2 建议
(1)加强对不同失稳人群步态失稳机理等基础问题研究,构建步态失稳预测评价体系。为探究人体失稳内在机理,可分别获取老龄、神经/运动退行、膝置换、脑瘫等步态易失稳人群的大样本多模态神经生理和步态数据,构建精准静动态神经肌骨模型。同时,定量研究不同人群运动功能障碍特征(内因)与复杂环境因素(外因)相耦合的步态模式,探究可穿戴步态平衡改善干预方案,建立并验证步态联合多模态神经生理的失稳预测评价体系,为穿戴式失稳干预技术产品研发提供仿真测试及理论基础。
(2)加快推进失稳“监测−预警−防护−训练”关键技术及设备研发,保障产品落地实施。当前,尽管相关失稳干预技术已取得较大进步,系列产品也不断出现,但失稳预警、防护和训练的精准化、智能化水平整体较低,许多关键技术亟待突破。为此,国内生物力学及康复领域顶尖团队应与龙头企业、优势医院等紧密联合,形成技术突破−产品开发−临床应用的全链条。同时,加快成立医院防失稳干预门诊、建立医养融合健康技术转化基地、开展大规模医院社区应用等,全方位提高我国老龄失稳精准干预的整体水平,促进我国在失稳防控领域从“跟随者”成为“领跑者”。
(3)加大对步态失稳干预关键技术研究的政策扶持力度,保障技术转化推广。步态失稳精准干预技术及产品开发是解决我国老龄化问题的关键,具有重大的社会和经济效益。国家科技部、国家卫生健康委员会和地方科技主管部门应当加大对相关技术研究的扶持力度。同时,相关科研院所和企业在失稳干预产品研发期间,应借助国家政策和地方资源优势,抓住健康养老产品需求的机遇,勇于创新突破、加速推进失稳关键技术进步。
结束语
在我国老龄化加速态势背景下,步态失稳已成为老年健康面临的重大威胁,穿戴式步态失稳精准监测及干预技术是解决失稳危害的关键。目前,中国已在穿戴式失稳量化、监测、预警、训练防护等共性关键技术取得重要进展,有力提高了我国智慧养老水平。但是,在失稳干预产品及技术的智能化水平、产业化推广等方面与临床实际需求仍存在较大差距。未来,全流程、个性化步态失稳精准干预解决方案将是老年防失稳技术发展的重点方向,有望真正意义上促进我国健康养老发展。
END
往期推荐
综述与述评 | 乔惠婷,汪待发,等:近红外脑功能成像技术发展及应用趋势
前瞻 | 李光林:科技赋能主动健康 创新支撑健康中国

书阅科苑 | 苏青:量子信息组网 直接输送安详——《量子信息网络》的理论创新与实践价值

科技洞察 | 刘杨,刘畅,等:中国无人作战装备成果及全球趋势——基于抗战胜利80周年阅兵的观察

科技洞察 | 方海峰,丁振森,等:飞行汽车发展现状、挑战及对策

综述与述评 | 魏小刚,杨仁福,等:量子传感技术研究现状及发展趋势
关于本刊
《前瞻科技》是由中国科学技术协会主管,科技导报社主办、出版的科技智库型自然科学综合类学术期刊,于2022年创刊。
办刊宗旨:紧扣国家科技创新需求,联合全国学会和科技智库机构,汇聚战略科学家、主流智库学者,通过提供战略性、前瞻性、权威性的思想观点和政策建议,为科技管理者和科研管理者供给高质量决策参考。
常设栏目有“前瞻”“综述与述评”“聚焦”“论坛”“文化”“书评”等,其中“前瞻”“综述与述评”为固定栏目,其他为非固定栏目。
期刊官网:www.qianzhankeji.cn


长按识别二维码关注我们
点击“阅读原文”直达期刊官网,查看更多精彩内容





