 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库意大利5G MASS项目 解锁港船协同的智能航运实践

当前,各国在海上自主水面船舶(MASS)方面广泛开展技术研发和试验,并逐步向运营推进,很多典型项目受到国内外重点关注。本文主要介绍意大利5G MASS项目,该项目特点是除了围绕MASS自主技术进行研发试验,还重点考虑了船舶端与港口端的技术协同,涉船涉港各相关主体参与其中,共同推动港口和海事行业的数字化转型,促进港航领域技术和经济发展。
PART
5G MASS项目由意大利航天局(ASI)和欧洲航天局(ESA)商业应用计划资助,意大利海岸警卫队支持,海上航运公司、港口以及引航等共同参与,该项目提供了基于5G技术和卫星通信的解决方案,助于实现在海港区域进行船舶辅助驾驶或自动驾驶航行。该项目自2023年开始,是意大利自主航运发展的重要里程碑,在高精度船舶定位、双向宽带通信、远程操作中心以及船舶-港口功能孪生等方面取得了切实成果。

PART
意大利利沃诺港(Livorno)是5G MASS项目的核心试验载体,位于跨欧洲运输网络核心区域,是意大利首个尝试开发面向自主航运海事服务的港口。该港口配置围绕MASS的港内运行需求打造,涵盖数字基础设施架构、网络通信、传感监测、算力支撑、软件服务、安全体系六大核心维度,同时配套建设了适配MASS运行的远程操作中心(ROC)专属资源,形成“云边端协同、天地网融合、数智安一体”的MASS港内运行支撑体系。
港口数字基础设施采用标准化三层云栈架构,各层级功能分工明确、协同联动,是所有MASS相关服务的基础载体,整体架构支持功能扩展和灵活适配。
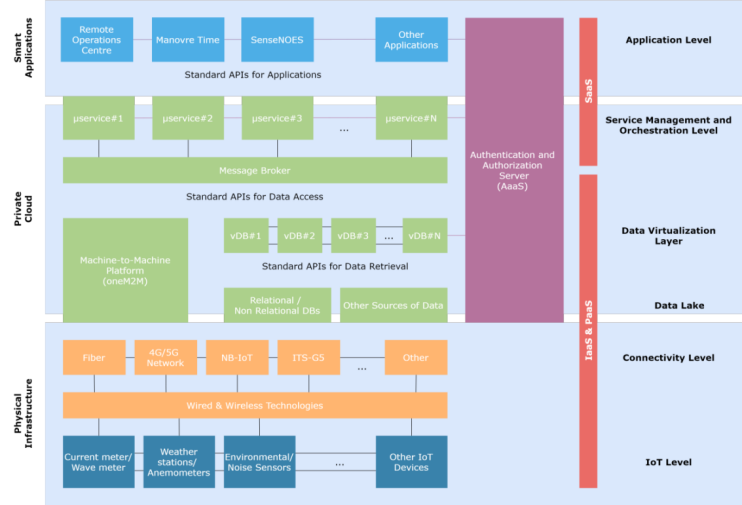
1.基础设施层(IaaS):算力、网络、硬件的物理支撑,是港口数字基建的“硬件底座”,核心配置以高规格计算集群和全域物理网络为核心,同时为MASS试验提供专属资源,具体包括:
算力集群:由5台AMD霄龙服务器组成,具备高计算和高存储能力,托管约20台虚拟机+多台Docker容器,用于部署平台核心组件、软件层应用及内部服务(文件存储库、代码版本控制、项目管理等);配套1台高性能图形服务器,专门支撑AI算法的运行和数据处理;部分算力节点被配置为5G边缘节点,就近处理数据,实现实时应用的低时延快速通信。
物理网络:港内全域覆盖光纤optic骨干网,密集覆盖所有码头、闸门,为政府机构和港口核心服务提供稳定互联网接入;部署独立的5G非公共网络(NPN),作为MASS试验的核心通信网络,从防波堤到码头泊位覆盖整个港口水域。
专属资源预留:为MASS远程操作中心(ROC)分配了独立完整账号,专属预留的算力、网络、存储资源,确保MASS试验服务与港口其他服务物理隔离、资源独享。
2.平台层(PaaS):数据管理、交互共享、可信保障的核心枢纽,是港口数字基建的“数据大脑”,实现数据的存储、处理、聚合、共享和安全防护,同时设备交互接口标准化,消除数据孤岛,为上层服务提供统一的数据支撑,配置包括三大核心功能模块:
设备交互标准化模块:基于oneM2M标准的Mobius开源物联网平台,支持HTTP、CoAP、MQTT等多种协议绑定,实现与各类传感设备、物联网终端的统一注册、发现、数据管理和通知,港内设备的通信接口标准化。
数据管理模块:整合多类型数据库管理系统(如SQL关系型数据库、MongoDB文档型数据库、PostgreSQL面向对象数据库、ArcGIS地理数据库),通过数据虚拟化层(DVL)提供统一API实现全域数据访问,同时支持角色权限划分,确保数据按需共享。
可信信息安全模块:兼容主流DLT技术,基于Open API标准实现接口集成,保障数据传输和存储的可信性,同时避免技术锁定,具备高可用性和容错能力。
3.软件层(SaaS):微服务应用、服务编排、人机交互的功能落地,是港口数字基建的“应用终端”,以微服务架构为核心,实现海事服务的快速开发、编排和落地,同时为MASS试验打造专属交互和服务能力,具体配置:
基础服务能力:实现典型企业服务总线(ESB)功能,支持微服务的敏捷开发、生命周期管理和无缝组合复用。
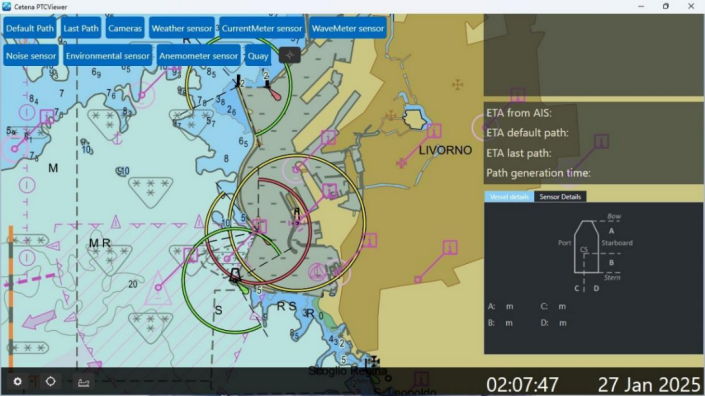
MASS专属服务:开发原型化“Vessel Companion”交互式用户界面,作为船岸团队的实时信息数据共享载体,用于测试港内/远海MASS实时跟踪监控、MASS避碰(危险情况早期检测+最佳航线重新规划)、MASS到港泊位分配与管理(泊位/堆场资源预订)三大核心服务。
前端交互适配:明确区分技术后台流程和终端用户前端接口,所有功能逻辑封装于虚拟机/Docker容器,适配驾驶台船员、ROC操作员等不同角色的操作需求。
利沃诺港为MASS试验提供5G专用网络,作为船岸数据传输、远程控制的核心通信通道,同时使用公共网络冗余备份,具体参数:
1.5G NPN核心配置:采用独立组网(SA)解决方案,配备1个核心网单元+3个宏基站,实现港口水域的全域覆盖;分配专用的公共陆地移动网标识PLMNID,用户面采用N258频段、控制面采用B42频段,确保通信的专属性和稳定性。
2.通信能力适配:满足MASS港内运行的高带宽数据传输需求,可支撑雷达/AIS数据(100kbps)、LiDAR原始数据(1-2Mbps)、高清摄像头视频流、船舶ECDIS/AIS实时数据的双向高速传输,实现100/50Mbps以上的上下行吞吐量。
3.冗余备份机制:当船舶需要通过公共网络连接ROC时,设置VPN虚拟专用网络+身份认证授权程序实现通信安全,以弥补专用网络的覆盖边界,保障船岸通信的连续性。
港内部署异构传感资源网络,覆盖船舶定位、海洋气象、港内环境、视觉监控等维度,所有传感设备均接入港口三级云栈上层,实现数据的实时采集、传输和处理,为MASS运行提供全面的环境感知数据,具体配置:
1.高精度定位类设备
港内部署RTK锚点(固定基准点),以校正GPS信号,为港内MASS提供厘米级高精度定位,解决港内避碰所需的相对位置估算问题;与船舶搭载的RTK流动站联动,实现船舶近港时的定位数据实时校准,保障港内航行的定位精度。
2.海洋气象监测类物联网设备
部署多台智能物联网终端,实时采集港内海流强度、波高、风速/风向、潮汐水位等运行关键数据,同时采集噪音水平、空气污染物等环境数据,为MASS航迹规划、操作模式切换提供环境依据。
3.视觉与空间感知类设备
部署多组高清摄像头,覆盖船舶进出港的核心水域,实现港域画面的实时视频流采集,同时支持AI图像识别处理(如障碍物检测、船舶识别),与船舶搭载的传感设备形成“船港协同感知”。
港口为MASS试验打造了跨层级、全流程的安全防护体系,覆盖身份认证、数据访问、网络通信、租户隔离等方面,确保数据和操作安全:
1.统一身份认证授权:部署认证授权服务器,实现单点登录(SSO),通过进行权限验证,精准控制用户对资源、微服务、应用的访问权限。
2.多租户隔离机制:实现不同租户的资源隔离,确保MASS试验的ROC专属租户与港口其他租户互不干扰。
3.网络通信安全:5G NPN专用网络实现物理隔离,公共网络连接时加密+额外身份验证;数据传输过程中通过DLT技术保障可信性。
4.操作安全管控:通过运行边界(OE)控制和操作模式切换实现操作安全,当港内环境、网络状态不满足要求时,自动限制MASS运行,避免安全风险。
PART
试验船舶选用常规船舶进行智能化改装,主要围绕MASS在港内运行的感知、通信、数据交互、高精度定位等核心需求展开,未改变船舶基础船体和动力结构,通过加装传感设备、部署通信终端、开发专属数据交互软件,实现船端数据的实时采集、传输与船港联动,整体改装方案兼顾试验性与实用性。
改装船舶为滚装船“Grimaldi Eco Savona”轮,船长238m、船宽34m、吃水7.2m,已在利沃诺港常态化运营,改装后成为适配港内MASS自主航行试验的数字船舶,是项目中“船端”核心试验载体。船舶具有两种MASS操作模式:
驾驶员辅助模式:船岸数据实时联动,岸端ROC为驾驶台提供额外的环境信息、航行建议、障碍物预警;
驾驶员模式:试验中可快速恢复船舶传统操作模式,驾驶台完全自主操控,确保航行安全。
本次改装为船舶新增了激光雷达(LiDAR)、高清智能摄像头、5G通信终端、RTK(实时动态定位)流动站,所有设备均根据港内航行感知需求精准布局,实现船舶周边环境感知、高速数据传输和厘米级高精度定位,设备选型兼顾工业级防护、海事环境适配性和数据传输效率:
1.激光雷达(LiDAR)系统
(1)设备主要参数
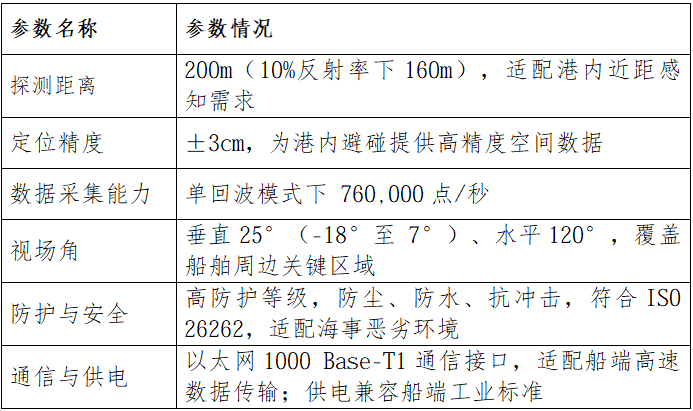
(2)安装布局
安装数量:4台;
安装位置:驾驶台两侧,海拔高度22米处;
布局设计:旋转90°安装,以不同角度指向周边水域,实现船舶停靠泊位过程中码头区域全视野覆盖,弥补传统导航设备的空间感知盲区。
2.高清智能摄像头
加装8台海事级高清夜视摄像头,支持远程变焦、云台调节,覆盖船舶横向/纵向超180°视野,与LiDAR形成“视觉+空间”双重感知。核心功能为:
实时采集港内航行高清视频流,直接传输至岸端ROC;
支持AI图像识别处理;
为驾驶台提供船舶周边可视化环境信息,支持增强现实(AR)操作界面。
3.通信终端系统
加装N258频段5G CPE(客户前置设备),专用网络适配终端,支持3GPP R16标准。通信终端安装在船舶驾驶台最高处,确保5G信号无遮挡,实现与港口5G基站的稳定连接。作为船端所有加装设备和原有导航系统的数据传输“网关”,将LiDAR、摄像头、RTK、ECDIS、AIS的所有数据统一加密传输,同时接收岸端指令、港内环境数据、航迹规划信息。
4.RTK定位流动站
加装RTK流动站,兼容GPS等全球导航卫星系统,接收港内RTK锚点的校正信号,对船舶原有卫星定位数据进行实时校正,实现厘米级绝对定位。
PART
由于没有MASS相关监管规范,5G MASS项目中船舶未取得正式MASS运营认证,所有航行均是试验行为,并严格遵循IMO相关规则和当地港口航行规则。试验前船上所有子系统需通过工厂验收测试和现场验收测试,并在技术层面实施验证与确认(V&V)程序,完成港内5G NPN网络、ROC系统、港侧传感设备的联调,确保试验全链路技术成熟。确保所有试验均在网络安全环境(专用网络)中实施,一旦通过公共网络连接ROC时,采取额外防护措施。
航行试验主要是验证船舶两种操作模式的可行性与安全性,同时对船端感知、船港通信、障碍物检测、高精度定位、ROC 远程辅助等核心功能进行全场景测试。试验明确了驾驶员辅助模式和驾驶员模式的触发条件、适用航段、切换规则,并通过实际航行完成验证。
1.驾驶员辅助模式需要在以下条件下开展:
船舶航速低于7节;
港内海洋气象条件经驾驶台判定为“适宜航行”;
船港5G NPN网络上下行吞吐量高于100/50Mbps。
该模式下,ROC为驾驶台提供全流程远程辅助,包括实时环境数据推送、航迹规划建议、AR视图支撑、障碍物预警,驾驶台结合ROC辅助完成船舶靠泊/离港操作,验证船岸协同操作的效率与安全性。
2.驾驶员模式
当船舶30米范围内检测到障碍物、船舶航速超过7节、港内气象条件恶劣、5G网络通信质量不达标,则船舶进入驾驶员模式,ROC暂停所有远程辅助功能,仅保留基础数据监控,船舶完全由驾驶台操控,验证模式切换的及时性和传统操作的安全性。

通过试验验证,该项目的检测算法可对最大约500米距离的障碍物进行有效检测提供参考,感知系统对障碍物的检测精度与船舶距障碍物的距离相关,距离越近,检测误差越小。
基于试验成果,项目提出后续优化方向,以适配更高等级的MASS自主操作和远海航行场景。
设备升级:增加LiDAR和摄像头的数量,实现船舶360°无死角全向覆盖,提升远距感知能力。
通信冗余:融合低轨卫星通信终端,实现5G网络与卫星网络的双模通信,支撑远海MASS航行。
自主控制接口:在现有数据接口基础上,增加船舶动力、操舵系统的控制接口,实现岸端ROC的远程操控,支撑更高等级的MASS自主操作。
AI算力加装:在船端加装边缘AI算力节点,实现部分环境感知数据的本地实时处理(如障碍物检测、避碰决策),降低对船港通信的时延要求。
多设备兼容:适配更多类型的海事传感设备,实现船端感知能力的灵活扩展。
服务扩展:将现有MASS港航服务延伸至陆域物流,实现港航-物流的一体化智能服务。
PART
在5G MASS项目中,船舶并未以完全自主航行和远程控制为研发定位,项目核心聚焦于港口与船舶的技术协同适配,通过港口与船舶的感知融合、数据互通、操作联动构建了MASS运行的保障体系。该项目为我国当前智能航运发展提供了实践参考,智能航运发展不能仅停留在自主船舶技术研发、港口智能化改造等单一领域,要从“单点研发”转向“全域协同”,港-船适配发展是智能航运从技术研发走向商业化运营的关键路径。
船舶端和港口端需在数据、标准、接口等交互界面深度融合,智能船舶运行需要充分考量特定港口场景的辅助支持与限制条件,智慧港口建设也应将基础设施对MASS的适配性规划置于重要位置。港口是MASS技术落地的“连接器”与“支撑点”,港口的全域感知、算力支撑、运营调度能力与船舶的感知、通信、操作能力的深度融合,通过软硬件布局、标准制定、体系构建,充分发挥港船技术协同效应,稳步推动智能航运高质量发展。
1.MSC 110-INF.5 - Project 5G MASS
2.https://business.esa.int/projects/5g-mass
3.https://jlab-ports.cnit.it/






