 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库综述与述评 | 郑悦,李光林,等:多功能上肢假肢技术研究进展与发展建议
点击蓝字 关注我们


郑悦
-博士,中国科学院深圳先进技术研究院高级工程师

李光林
-博士,中国科学院特聘研究员(二级)
-粤港澳人机智能协同系统联合实验室主任
-中国科学院深圳先进技术研究院先进集成技术研究所所长


中国肢体残疾人口持续增长,上肢截肢患者对高性能假肢需求迫切。肌电假肢虽具备直觉控制优势,却存在结构灵巧性不足、控制稳定性欠佳和缺乏感觉反馈等问题,导致其弃用率居高不下。近年来,多学科交叉融合为多功能上肢假肢技术的发展带来新的机遇。文章从仿生机械创成、生物信息解码、多模态感知与感觉反馈、运动控制策略、快速适配5个方向,系统梳理上肢假肢技术最新研究进展,剖析该领域发展趋势与现存挑战,并从技术研发、政策支持等维度提出针对性建议,以期推动中国上肢假肢技术向智能化、仿生化、实用化迈进,加速高性能假肢普惠化应用。
灵巧上肢是人类各种活动的基本保障,是感知环境并与之交互的重要工具。然而,据全国残疾人抽样调查结果显示,中国肢体残疾人口高达2 472万,且由于人口老龄化、意外伤害等因素影响,该群体规模呈持续增长趋势。其中,上肢截肢患者因肢体功能缺失,面临生活自理困难、社会参与受限等诸多问题,对高性能上肢假肢的需求日益迫切。
佩戴假肢是上肢截肢患者恢复和补偿肢体功能的主要方式,而肌电假肢凭借对使用者运动意图的直觉化识别和控制,成为当前临床应用研究的主流方向。人类肢体的精准操作依赖于运动和感觉神经通路的“闭环控制”机制,而截肢会切断该通路,导致运动意图传递和感觉信息反馈的双重缺失。因此,帮助截肢患者恢复肢体功能的关键的是重建类自然肢体的运动控制和感觉反馈机制,即构建可模拟“运动神经信号输出”和“感觉神经信号输入”的通道,并结合高效运动控制策略,实现假肢对自然肢体功能的模拟,这也是当前上肢假肢研发的核心技术瓶颈。目前,上肢假肢多由肌电(Electromyography, EMG)信号控制,通过采集残肢EMG信号实时解码运动意图并控制假肢完成对应动作,具备直觉控制的优势,其控制流程如图1所示。现有肌电假肢虽能实现基本的运动控制,但在结构仿生程度、运动意图解码精度、多模态感觉反馈和个性化快速适配等方面仍存在明显不足,且临床中假肢弃用率高达40%,反映出技术研发与临床实际需求之间的脱节。
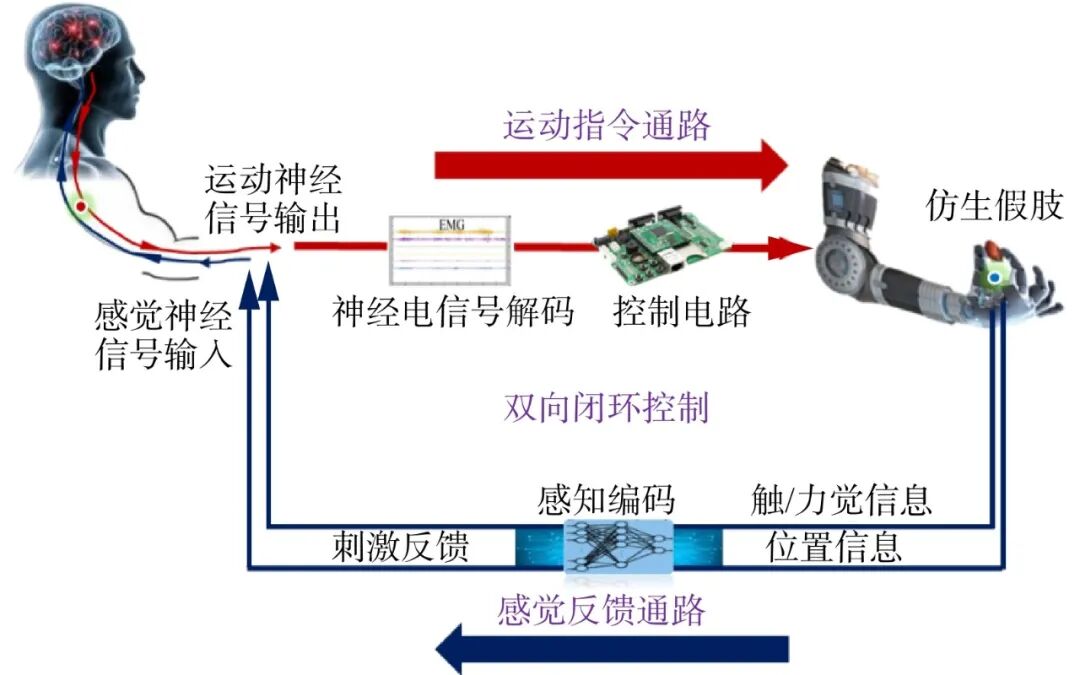
图1 运动与感觉信息的双向神经通路
fig.1 Bidirectional neural pathway of motor and sensory information
近年来,机器人技术、人工智能、生物传感和材料科学等多领域的交叉融合,为多功能上肢假肢技术发展带来新机遇。国内外研究团队围绕假肢机械结构、运动意图识别、感觉反馈、控制策略和适配技术等核心方向开展大量研究,取得系列创新性成果。文章系统梳理该领域最新研究进展,剖析技术发展趋势与现存挑战,提出针对性发展建议,以期推动中国上肢假肢技术向智能化、仿生化和实用化迈进,提升康复辅助器具服务能力,减轻肢体残疾患者带来的家庭及社会负担。
发展现状
多学科交叉融合推动多功能上肢假肢技术实现跨越式发展,其核心体系已由传统的单一运动控制,迭代为集结构仿生、意图识别、感觉反馈、智能控制和快速适配于一体的综合系统。
1.1 灵巧上肢假肢的仿生机械创成
上肢假肢的本体结构主要体现为机械结构和传感装置的集成,决定了假肢的基础功能。鉴于人体上臂(7自由度)与手部(21自由度)的高度复杂性,全自由度复刻在工程上难以实现。为使假肢在满足类人的运动功能基础上同时简化设计结构,研究通常先通过运动聚类分析揭示人体上肢的运动协同规律,再采用欠驱动设计实现高效的仿生运动映射,并基于患者截肢程度的差异,构建模块化灵巧上肢假肢体系,以满足临床多样化的使用需求。
国内研发机构在模块化假肢结构设计方面成果显著。1992年成立的上海科生假肢有限公司,研发出单自由度至4自由度的智能型肌电控制假肢系列,可适配掌根部至肩胛全部切除等各类截肢患者。中国科学院深圳先进技术研究院研发的上肢假肢具备11主动自由度,由5自由度上臂假肢和6自由度假肢手组成,可精准适配不同截肢程度的运动需求。中国科学技术大学研发的6主动自由度假肢手,在同等体积下实现了腕关节更大屈曲范围,更适配肘部截肢患者。相比之下,国外商业化假肢技术起步较早,Ottobock公司的Dynamic Arm系列、Steeper公司的Espire Elbow系列、Fillauer公司的Utah Arm系列均能满足肱骨截肢等高度截肢患者的需求。
在假肢手研发方面,为使假肢手具有灵巧的运动特性,适应不同的运动模式和应用场景,研究者设计了基于多种驱动源和传动结构的仿生假肢手(图2)。其中,全驱动结构的假肢手由于体积尺寸大,难以实际应用,如Shadow Dexterous Hand。欠驱动结构具有减轻重量和增强系统灵活度等优点。因此,假肢手往往采用欠驱动结构设计。通过欠驱动结构模仿人手运动特性的关键是耦合关节选择与耦合结构设计。关节耦合度高的假肢手控制精度高,如哈尔滨工业大学等研制的DLR/HIT Hand II、西班牙国家研究委员会研制的MANUS Hand和南安普顿大学研制的Remedi Hand;关节耦合度低的假肢手对抓取物体的形状适应性更强,如意大利圣安娜高等学院研发的假肢手Smart Hand、比萨大学等联合研发的假肢手Pisa/IIT SoftHand 2、华中科技大学研发的假肢手X-Hand和意大利技术学院研发的假肢手Hannes Hand。此外,笔者研究团队设计了一款12自由度(6主动自由度)的模块化仿生假肢手,每个手指能够独立屈伸,为增加假肢手的抓握能力,拇指额外有一个主动的内收/外展主动自由度,以及1个内外旋的被动自由度(图3)。

图2 假肢手结构分类
fig.2 Classification of prosthetic hand structures
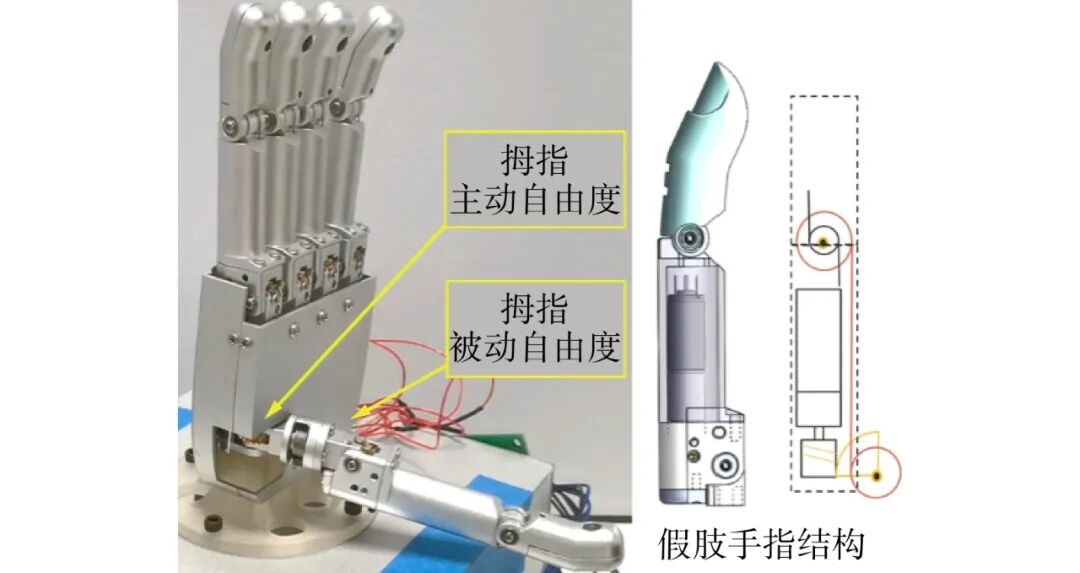
图3 仿生假肢手
fig.3 Bionic prosthetic hand
商业化假肢手领域,国内产品(如北京因时机器人科技有限公司的RH56系列灵巧手、上海傲意信息科技有限公司的Ohand假肢手、浙江强脑科技有限公司的BrainCO假肢手)与国外产品(如Ossur公司的i-Limb假肢手、Ottobock公司的BeBionic假肢手、Taska公司的TASKA假肢手、Psyonic公司的Ability假肢手等产品)在结构性能上的差距已大幅缩小,均采用模块化手指结构,核心制约因素均为高能量密度微小电机等驱动装置等。
1.2 基于多源生物信息的运动模式识别
运动模式智能识别的理论基础认为截肢者的残留肌电信号中包含了丰富的运动相关信息,截肢者通过想象“幻影(phantom)”肢体做不同动作使残存肌肉收缩产生EMG信号,利用智能识别技术从EMG信号中提取出有效的特征集合,输入动作分类器中,就可以预测出截肢者的运动意图。当前主流技术为肌电模式识别与深度学习,多源生物信息融合和跨个体泛化也成为现阶段核心研究热点。
基于肌电的模式识别(Pattern Recognition, PR)技术已实现基础动作的解码。1993年,Hudgins等利用PR方法从前臂截肢者的残留EMG信号中成功解码出了腕外翻/内收、腕外旋/内旋等4种腕部动作。2003年,Englehart等使用滑动窗和线性分类器将截肢者4种手部动作的识别率提升至93%。2012年,Muceli等依托人工神经网络算法构建健侧与截肢侧肢体的运动关联模型,提出肌电同步比例控制方法,实现了截肢侧肢体运动的连续比例调控。2018年,Hahne等在Science Robotics上提出基于回归模型的假肢手同步比例控制方法,实现2自由度假肢手的实时操控,可长期应用(图4(a))。2021年,谷国迎等在Nature发表研究成果,将肌电模式识别与触觉反馈融合,实现截肢者对多自由度轻量化软体神经假肢手的闭环控制(图4(b))。李光林团队是国内较早开展神经假肢研究的团队,2007年完成全球首例神经功能重建受试者的肌电信号解码和智能假肢操控,动作完成率超95%。
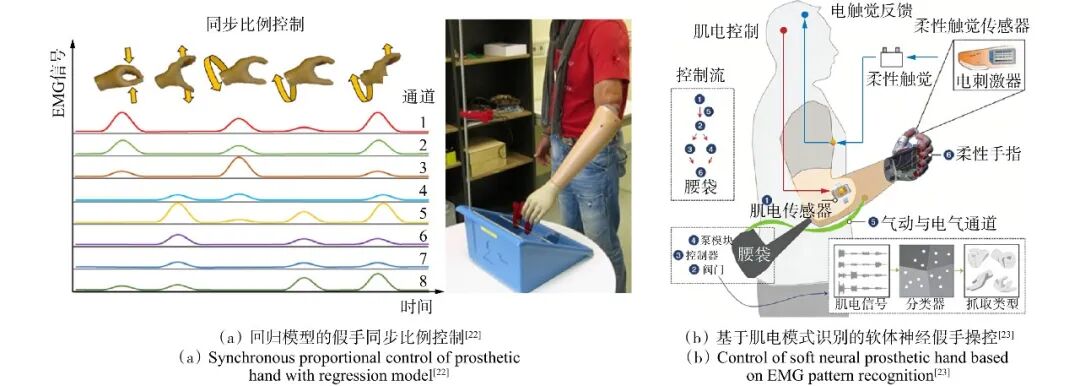
图4 基于肌电的运动模式识别
fig.4 EMG-based motion pattern recognition
深度学习问世后在模式识别领域应用日趋广泛。相比传统方法,深度学习可从大规模数据中自动学习特征表示,逐步替代人工特征提取,显著提升模型性能,其近年来被引入肌电运动意图识别领域并取得系列研究成果。Montazerin 等提出紧凑型Transformer手势识别框架,通过提取高密度肌电数据的时空特征实现65种手势分类;2024年,Ovadia等采用随机卷积核变换变体提取特征,在降低计算复杂度的同时实现了较高分类精度。
国内高校及科研院所积极开展了相关研究,上海交通大学朱向阳团队、哈尔滨工业大学刘宏团队、中国科学技术大学陈香团队、重庆大学侯文生团队、复旦大学戴晨赟团队等在深度学习、肌肉运动单元分解、运动意图识别鲁棒性提升及假肢控制等方面均取得重要进展。中国科学技术大学陈香团队提出尖峰卷积神经网络,其在小样本训练和电极移位实验中的性能优越。中国科学院深圳先进技术研究院李向新等针对传统机器学习方法跨个体适配性不足的问题,开展迁移学习跨个体泛化模型研究,有效提升了分类器的跨域泛化能力。上海交大戴晨赟团队提出基于运动单元分解的意图识别方法,利用盲源分离将肌电信号分解为肌肉运动单元动作电位序列,大幅提高了运动意图识别准确率。
目前,运动模式智能识别仍面临复杂动作解码精度低、算法鲁棒性不足的问题,肌肉疲劳、电极移动、皮肤阻抗的变化及个体差异等因素仍会显著影响识别效果,高精准、高鲁棒的解码算法是研发重点。
1.3 假肢多模态感知信息获取及感觉反馈
感知功能是假肢手功能设计中的关键要素,不仅能提升使用者对假肢的控制精度,也可增强用户体验,使假肢手能够更加灵活地适应各种任务和环境。感知功能在假肢手技术中体现在感知信息的获取和传递两个方面,包括通过多模态传感器获取假肢和环境信息,以及利用感觉反馈将获取的信息传递给假肢的使用者。多模态传感器是假肢感知外界的基础,可获取力、位置、纹理和温度等环境信息,而新型触觉传感器阵列更能在非结构化场景中感知接触状态、识别物体表面特征、判断物体物理属性,为人−机−环境的安全交互提供关键支撑。
当前触觉传感器主要分为电容式、压阻式、压电式、视觉式、光纤布拉格光栅、摩擦电式等类型,国内外研究团队均开展了大量创新性研究(图5)。其中,中国科学院自动化研究所提出GelStereo系列视触觉传感技术,通过胶体层形变结合视觉算法实现高精度多模式触觉感知;中国科学院北京纳米能源与系统研究所研发的柔性传感器,可实现压力、温度、接触材料的多模态感知;中山大学基于耐高低温、低迟滞有机水凝胶构建柔性应力应变传感器,结合机器学习赋予机械手人工触觉,实现运动感知和物体抓握识别。此外,中国科学院上海高等研究院、浙江大学、中国科学技术大学苏州高等研究院、济南大学、厦门大学、北京大学和中国科学院深圳先进技术研究院等机构也在柔性触觉传感方面取得重要研究成果。
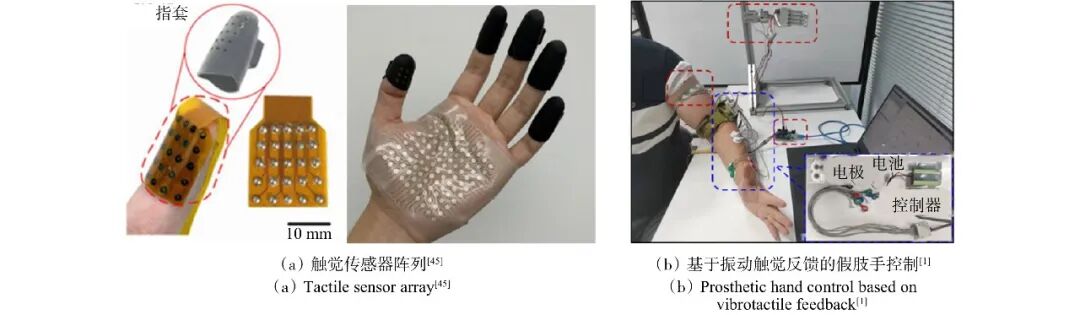
图5 触觉信息获取与感觉反馈
fig.5 Tactile information acquisition and sensory feedback
为了实现更自然的人机交互,提高假肢手的使用效率,需要将感知到的触觉信息反馈给使用者。截肢后的感觉反馈重建的理想目标是重现正常感觉的神经元激活模式。然而,皮肤中感觉受体种类繁多且分布密集,使得实现自然且直观的感觉反馈面临挑战。假肢的反馈方法按与人体接口是否有创,可分为非侵入式和侵入式两类。侵入式方法,如目标肌肉神经重建、神经电极接口技术等,需手术干预,因患者接受度低难以推广。非侵入式方法无需手术,虽反馈潜力有限,但具有损伤小、感觉替代方式丰富的优势,成为当前上肢假肢控制系统的主流应用方案。目前,常用的非侵入式感觉反馈方法包括振动反馈、温度反馈、机械触觉反馈、电触觉反馈、声音反馈和增强现实反馈等。
国内外研究团队在非侵入式感觉反馈领域均取得重要进展。中国科学院深圳先进技术研究院团队通过振动编码反馈腕部旋转位置并确定人体最佳振动感知范围,还研发多通道经皮电神经刺激平台,可刺激残肢特定皮肤区域诱发稳定手指感觉。上海交通大学团队探究了电刺激参数对指感诱发特性的影响,明确不同频率下的感知模式分布并实现敏感度量化评估。香港城市大学与腾讯 Robotics X联合研发的触觉传感器阵列,模仿人体皮肤结构,依托压电效应实现外界刺激强度、位置和模式的实时感知。约翰霍普金斯大学研发的可穿戴薄膜热电设备,通过目标神经刺激恢复截肢者假肢的自然热感觉。洛桑联邦理工等机构联合开发的非侵入式可穿戴设备,可通过残肢热刺激诱发幻肢手的热感觉。
整体而言,国内研究紧密结合临床需求,注重设备的实用性和用户体验,而国外研究在技术创新和多样性上更具优势,多模态传感与反馈技术的深度融合仍是未来发展方向。
1.4 上肢假肢运动控制策略
在追求高度仿生和类人化特性的目标下,实现多自由度假肢直觉、自然的运动控制已成为肌电假肢控制算法的主要研究趋势。肌电信号作为直接、非侵入式的神经信息获取方式,虽在假肢控制中广泛应用,但仅凭有限的EMG信息推断多自由度精细动作的运动意图仍面临巨大挑战;且肌肉活动在不同运动任务中呈现高度动态性和非线性特征,进一步增加了运动意图的精准解码难度。为此,研究人员正通过先进信号处理技术、机器学习算法、多模态传感融合和新型控制策略的研发,持续提升假肢控制系统的性能。
当前上肢假肢控制策略主要分为单向控制、反馈控制与共享控制3类,如图6所示。其中,单向控制以使用者运动意图为唯一控制源,直接映射至假肢手;反馈控制在单向控制基础上增加假肢状态与环境信息的反馈环节,二者均依赖单一的运动意图控制。为提升控制效果,相关研究团队尝试将EMG信号与惯性测量单元、视觉和压力等环境感知信息融合,如意大利比萨圣安娜高等学校研发的磁控假肢手,通过肌肉内植入磁铁解码运动意图,实现日常活动的自然操控;同时,研发共享控制这一人机协同策略,让假肢手在抓取交互中实现部分操控自动化,有效弥补传统单一EMG控制的不足。
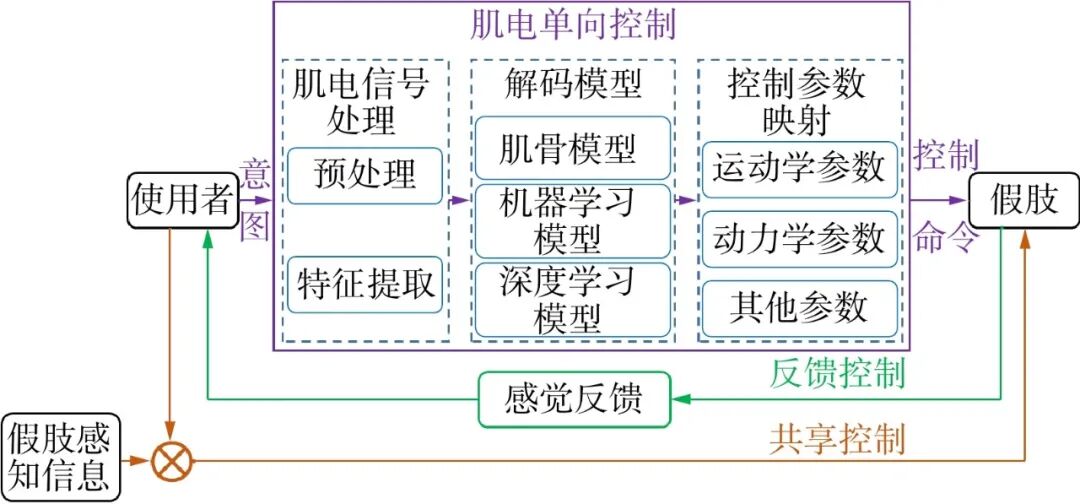
图6 上肢假肢控制策略
fig.6 Control strategies of upper limb prostheses
共享控制融合人类操控与系统自主控制的优势,已在自动驾驶、远程操作机器人等领域验证了其有效性。将共享控制应用于假肢手,可构建人机协同控制系统,使假肢手依据用户肌电信号、生物反馈信号和环境感知结果执行动作,在响应用户直接指令的同时,根据环境反馈自主调整行为,实现更自然高效的假肢控制。2024年,Science Robotics研究证实视觉技术可强化穿戴设备对用户意图的理解与环境感知能力。因此,线管研究团队将视觉信息应用到了假肢,结合共享控制方法实现对多自由度假肢直觉、自然的运动控制。例如,哈尔滨工业大学构建基于眼球追踪和增强现实的肌电混合控制系统,用户通过增强现实(AR)头盔选择抓取类型后,由EMG信号比例控制假肢抓取;中国科学技术大学提出跨模态控制框架,通过上臂视觉信息识别目标,经双层模糊决策选择抓取姿势与控制信号;德国哥廷根大学研发半自主控制系统,由视觉传感器识别目标并预调假肢姿态,再通过EMG信号完成抓取;德国卡尔斯鲁厄理工学院则通过视觉识别目标,实现假肢抓取轨迹与手腕方向的自动选择和执行。目前国内外均在深入探索共享控制策略的假肢应用,通过融合用户运动意图和假肢自主感知决策,弥合用户意图与任务执行间的差距,既能减轻假肢使用者的认知和物理负担,也能有效提升假肢的实用性和用户接受度。
1.5 灵巧上肢假肢快速适配
假肢适配是融合残肢综合评估、个性化设计、制造装配与康复训练的复杂过程,核心是为截肢患者打造尺寸、形状与功能适配的接受腔,作为人−假肢结合的关键载体。传统接受腔采用取型、制阳模、调模、制内衬套和制腔的制作流程,经组装、试穿后,再根据患者反馈反复调整,虽能保障适配性,但存在康复训练效率低、适配周期长和成本高的问题,适配耗时过长也成为假肢临床推广的主要障碍。
个性化快速适配是解决上述问题的关键,中国科学院深圳先进技术研究院从结构与功能双维度开展研究,构建了上肢假肢全流程快速适配体系,显著提升了适配与康复训练效率。该技术依托医学影像、计算机辅助设计(CAD)和有限元分析(FEA)技术,针对患者残肢个体差异,构建精准的残肢、残肢组织和接受腔联合有限元模型,通过受力分析优化界面应力分布,实现接受腔的个性化设计与优化。图7为具体步骤,包括:① 用核磁共振成像(MRI)完成残肢结构数据采集和三维模型逆向重建;② 通过Rhino等软件进行接受腔初步CAD设计;③ 构建残肢、组织和接受腔联合有限元模型,利用Abaqus完成受力分析与界面应力优化;④ 通过3D打印制作接受腔中间构型并让患者试用;⑤ 在试用过程中通过压力传感器采集数据,完成最终构型修型;⑥ 3D打印制作最终接受腔。该方法大幅缩短了适配周期,提升了接受腔的贴合度和舒适性,降低了患者的康复训练难度。
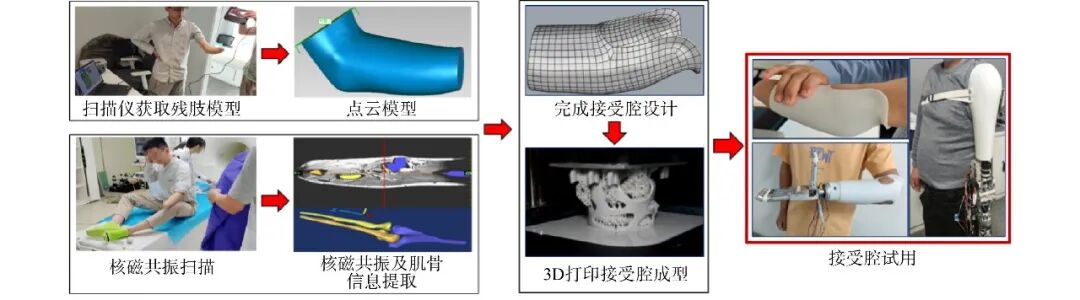
图7 假肢快速适配流程
fig.7 Rapid adaptation process of prosthetic hand
快速适配技术的核心价值在于实现个性化精准匹配,通过医学影像和有限元分析技术,让接受腔设计更贴合患者的残肢生理结构,减少佩戴不适和皮肤损伤,同时3D打印技术的应用大幅提升了适配效率,为假肢的临床普及奠定了基础。
发展趋势与挑战
2.1 发展趋势
多功能上肢假肢技术正朝着智能化与仿生化深度融合的方向快速发展,依托人工智能、生物传感等技术的迭代,假肢将更贴近人体自然肢体的功能特征。一方面,通过深度学习、迁移学习等算法优化,持续提升运动意图解码的精度和鲁棒性,实现复杂精细动作的精准控制;另一方面,通过多模态传感与神经反馈技术的创新,重建更自然的“运动−感觉”闭环控制,使假肢从单纯的功能补偿设备,逐步成为与人体高度融合的“延伸肢体”。
同时,技术的跨领域集成化、产品的个性化和普惠化成为核心发展方向。多功能上肢假肢将成为机器人、材料科学和康复医学等多技术的集成载体,高能量密度驱动装置、柔性生物材料和脑机接口等技术的交叉融合,推动假肢向功能增强型升级;在技术研发中,基于患者截肢程度、生理特征和生活需求的个性化定制将成为主流,伴随产业规模化发展和政策支持,高性能假肢的研发制造成本将逐步降低,实现个性化适配与普惠化应用的协同推进,使更多截肢患者能够获得优质的康复辅助服务。
2.2 挑战
1)核心技术仍存在瓶颈
运动意图解码的鲁棒性不足,肌肉疲劳、电极移位等环境因素仍会影响识别效果,复杂精细动作的解码精度仍需提升;多模态感觉反馈的自然性欠佳,非侵入式反馈技术的信息传递效率低,侵入式技术的临床接受度低,难以实现与人体神经通路的无缝融合;核心零部件国产化不足,高能量密度微小电机、高精度柔性传感器等核心器件仍依赖进口,制约了技术的自主可控发展。
2)临床转化与产业化衔接不畅
实验室研发的技术成果多聚焦于性能指标,与临床实际需求脱节,缺乏针对患者日常使用场景的验证与优化,导致假肢弃用率居高不下;中国上肢假肢产业仍处于初级阶段,大型功能性企业数量少,市场被国外品牌垄断,国内企业的技术转化能力与规模化生产能力不足,难以形成“研发−产业化”的良性循环。
3)适配与康复服务体系不完善
假肢的使用效果不仅依赖于技术本身,还与个性化适配、专业康复训练密切相关。目前,中国康复辅助器具配置人员、康复治疗师等专业人才短缺,假肢适配与康复训练的服务网络尚未实现全覆盖,尤其是基层地区的服务能力薄弱,导致部分患者即使配备了高性能假肢,也难以掌握正确的使用方法,影响使用效果。
4)政策支持与资源保障不足
多功能上肢假肢的研发属于高投入、高风险的前沿领域,需要长期的基础研究与临床验证,但目前针对该领域的科研立项倾斜力度不足,产学研用融合的机制尚未完善;同时,康复辅助器具的医保报销范围和比例有限,高性能假肢的价格偏高,导致多数患者难以承担,市场需求的不足也制约了产业的进一步发展。
对策建议
针对多功能上肢假肢技术在研发、转化和应用各环节的核心问题,需从多维度协同施策推动技术落地与产业发展。
(1)科研层面,建议将高鲁棒意图解码、多模态感觉反馈、核心器件国产化等关键技术纳入国家重点研发计划,同时构建产学研用协同创新平台,围绕临床实际需求开展定向研发,突破技术瓶颈。
(2)政策层面,建议将高性能上肢假肢纳入医保目录并提高报销比例,降低患者使用成本,同时简化医疗器械注册审批流程,出台临床转化激励政策,建立统一的产品质量标准以规范市场秩序。
(3)人才层面,建议支持高校增设康复工程、假肢矫形相关专业,培养多学科复合型人才,加强对行业从业人员的专业培训并建立考核认证体系。
(4)产业层面,建议支持国内龙头企业提升技术转化和规模化生产能力,促进假肢产业与机器人、3D 打印等领域深度融合和产业链构建;加强国际合作与交流,推动国产技术的核心指标与创新理念融入国际标准。
(5)聚焦用户核心需求,建立专业的用户数据库,收集各类使用反馈反哺技术研发与产品设计,引入用户参与式设计理念,使产品更贴合日常使用场景,持续优化假肢的人性化设计,兼顾功能、重量与佩戴舒适度,全面提升用户接受度和使用体验。
结束语
多功能上肢假肢技术是康复工程与机器人、生物医学、人工智能等多学科交叉的重要领域,其发展直接关系肢体残疾患者的生活质量和社会参与能力。近年来,中国在该领域的模块化设计、运动意图识别、快速适配等方面取得了显著突破,技术水平与国际先进差距持续缩小,为临床转化和产业发展奠定了坚实基础。当前多功能上肢假肢技术仍面临核心器件国产化不足、临床转化衔接不畅和康复服务体系不完善等挑战,未来需以临床需求为导向,强化产学研用协同创新,推动技术攻关、政策保障、人才培养与产业融合的一体化发展。通过持续的技术创新和体系完善,加速高性能假肢的普惠化应用,让更多截肢患者受益,同时以技术发展带动康复工程产业升级,为健康中国战略实施提供有力支撑。
END
往期推荐

综述与述评 | 王坤,许敏鹏,等:非侵入式运动想象脑机接口主动运动康复技术发展趋势

综述与述评 | 刁亚楠,赵国如,等:穿戴式步态失稳精准干预关键技术与挑战
综述与述评 | 乔惠婷,汪待发,等:近红外脑功能成像技术发展及应用趋势

前瞻 | 李光林:科技赋能主动健康 创新支撑健康中国
书阅科苑 | 苏青:量子信息组网 直接输送安详——《量子信息网络》的理论创新与实践价值

科技洞察 | 刘杨,刘畅,等:中国无人作战装备成果及全球趋势——基于抗战胜利80周年阅兵的观察
关于本刊
《前瞻科技》是由中国科学技术协会主管,科技导报社主办、出版的科技智库型自然科学综合类学术期刊,于2022年创刊。
办刊宗旨:紧扣国家科技创新需求,联合全国学会和科技智库机构,汇聚战略科学家、主流智库学者,通过提供战略性、前瞻性、权威性的思想观点和政策建议,为科技管理者和科研管理者供给高质量决策参考。
常设栏目有“前瞻”“综述与述评”“聚焦”“论坛”“文化”“书评”等,其中“前瞻”“综述与述评”为固定栏目,其他为非固定栏目。
期刊官网:www.qianzhankeji.cn



长按识别二维码关注我们
点击“阅读原文”直达期刊官网,查看更多精彩内容





