 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库多领域视角下自主船舶编队互操作性内涵研究*

摘要:随着智能航运技术的发展,自主船舶编队面临异构系统协同的挑战。从自动化、军事和电气工程三个领域出发,系统梳理互操作性的相关定义与标准体系,揭示三大领域在互操作性定义上的共性与差异,并进一步从技术范式与应用场景角度揭示三大领域互操作性定义差异的形成机理,为自主船舶编队互操作体系的构建提供理论依据。在此基础上,结合IMO与CCS关于智能船舶发展的相关要求,提出面向自主船舶编队的互操作性定义:船舶编队互操作性是指在多艘异构船舶组成的协同系统中,不同平台在通信协议、控制逻辑、感知设备、能源接口等方面实现信息交换、语义理解与功能协同的能力。本文研究可为构建异构船舶系统间的协同运行提供理论参考,对推动智能航运标准化建设具有一定的借鉴意义。
关键词:自主船舶编队;互操作性;自动化;军事;电气工程
一、引言
在交通强国、海洋强国等国家战略引领下,智能航运系统加速向集成化、协同化方向发展,船舶编队航行作为未来高效运输、应急响应和海上协同作业的重要模式,正逐步走向工程实践[1]。船舶编队航行是一种在海面上由两艘或两艘以上的船舶为完成某些任务而组成船队的共同航行方式,能够提高船舶航行效率,增强船舶机动性,降低航行危险,在船舶集群作战、海上搜救、极地航行等方面有着巨大的发展空间[2]。然而,异构船舶在通信标准、控制系统与能源接口协议等方面均存在差异,这一问题已成为制约船舶编队航行协同能力提升的瓶颈。以欧盟NOVIMAR项目为例,其“船舶列车”概念展示了无人船编队的可行性及节能优势,但项目中统一的通信标准与控制接口协议尚未建立,暴露出互操作性 ( interoperability ) 基础薄弱的问题[3]。Liu等[4]指出“船舶列车”可显著降低燃料消耗和运输成本,体现出经济与环境优势。NOVIMAR项目不仅明确展示了“船舶列车”模式在节能减排与航运效率提升方面的优势,还强调各参与船舶之间必须通过数字连接、导航控制系统与通信机制进行高精度协同。该模式需要整合电子海图显示与信息系统 ( ECDIS )、船舶自动识别系统 ( AIS )、雷达等多种系统,但现有公开资料尚未显示其通信标准或控制接口协议已统一,这凸显了构建标准化互操作性机制的必要性。
互操作性起源于信息系统领域,强调异构系统间信息共享与功能互通的能力,现已成为智能船舶系统集成与多平台协同运作的关键基础。当前自主船舶编队互操作性研究尚在起步阶段,亟须借鉴自动化、军事和电气工程等领域的理论成果与标准经验。目前,诸多国际标准从语义一致性、信息交换规范及服务协同机制等多维度,系统阐述了互操作性的核心构成要素与实现路径,为构建跨平台、跨系统的智能航运协同体系提供了可行范式。本文以多学科理论为基础,分析不同领域互操作性定义的异同,结合国际海事组织 ( IMO ) 与中国船级社 ( CCS ) 相关要求,提出面向自主船舶编队的互操作性定义,为推进异构船舶系统协同提供理论支撑与实践参考。
二、多领域互操作性的定义与特征
( 一 ) 不同领域互操作性的定义
互操作性起源于信息系统领域,其核心在于实现异构系统间的信息交换能力。在信息技术领域,互操作性指不同的软件、硬件或网络系统能够无缝协同工作,从而实现数据传输、信息交换与功能互通。该能力对系统的互联互通至关重要,可保障各类系统协作运行、资源共享并实现功能互补。自主船舶作为新兴研究领域,其互操作性相关研究仍处于探索阶段,而自动化、军事和电气工程领域已积累的成熟经验可为自主船舶互操作性研究提供重要的技术借鉴。
目前,不同领域对互操作性的定义并不统一。为系统呈现各领域权威机构对互操作性概念的理解,本文选取电气与电子工程师协会 ( IEEE )、国际电工委员会 ( IEC )、国际标准化组织 ( ISO )、北大西洋公约组织 ( NATO )、美国国防部 ( DOD )、仿真互操作标准组织 ( SISO )、中国人民解放军总装备部制定或批准的标准作为分析对象,梳理其在互操作性定义中的核心要素与描述方式 ( 见表1 )。
表1 各标准对于互操作性的定义

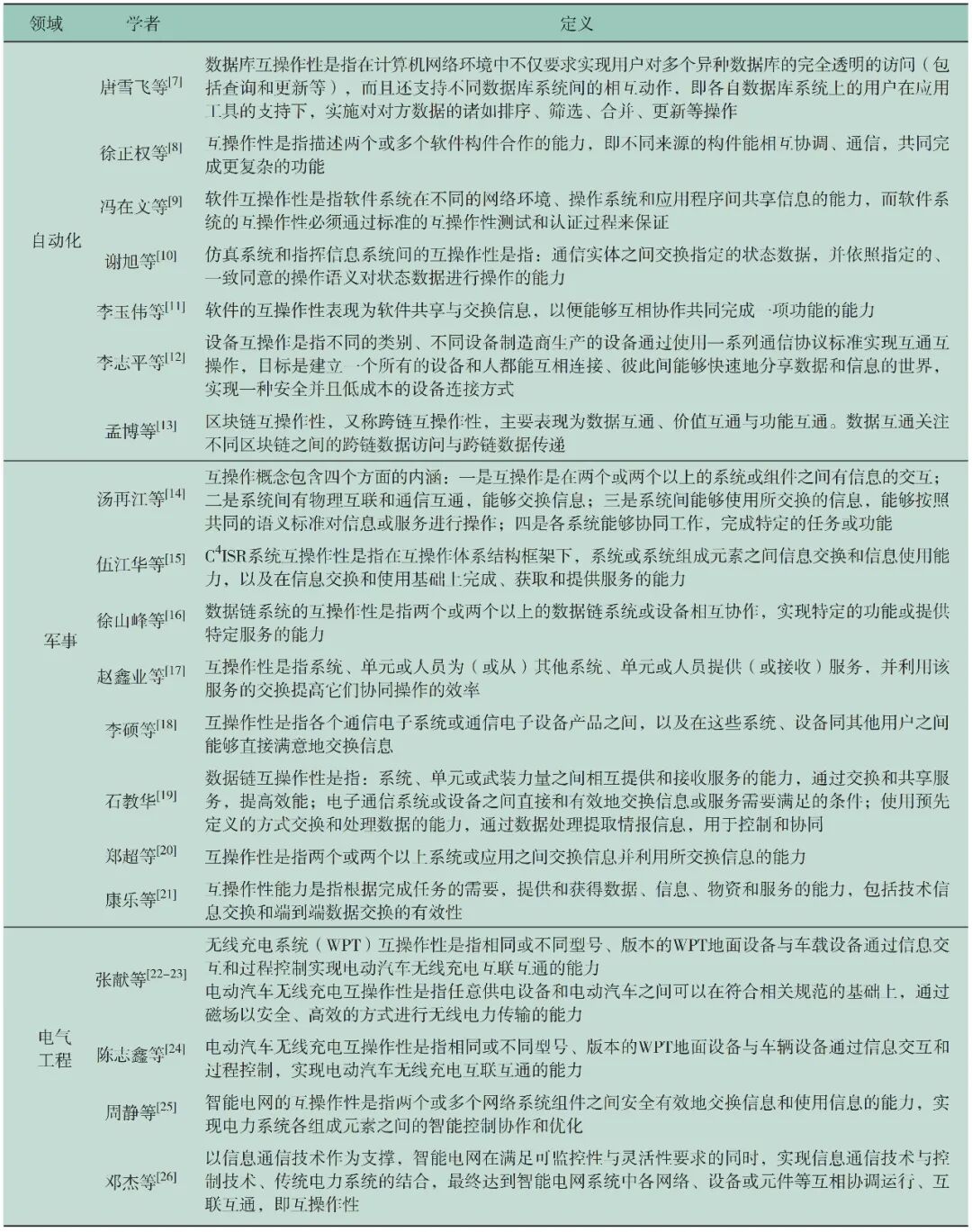
此外,为进一步补充学术视角下互操作性定义的内涵演进,本文归纳了多位代表性学者在自动化、军事和电气工程领域中的研究成果,构建起覆盖标准定义与理论阐释的多维度互操作性知识图谱 ( 见表2 )。通过标准与学术的双维度分析,为后续总结异构船舶编队所需的互操作性能力框架提供理论依据与比较基础。
表2 各领域学者针对互操作性的定义
( 二 ) 不同领域互操作性定义的差异
通过对自动化、军事和电气工程三大领域代表性标准以及学者关于互操作性的定义进行归纳梳理,可以看出不同领域对该概念的理解呈现出明显的技术范式与应用导向差异。尽管三大领域均强调系统间信息交换与功能协同的必要性,但其在内涵构建、核心机制与评价标准等方面的理论侧重不同,具体如下。
1.自动化领域的互操作性定义
自动化领域对互操作性的定义主要聚焦于异构系统或构件之间的通信能力、语义兼容性与功能集成。国际标准层面,IEEE Std 610.12-1990、IEC 61850与ISO 16100-1均将互操作性界定为系统间信息交换与正确使用信息的能力,强调通用语法和语义的基础作用,而ISO/IEC 2382:2015进一步将其扩展为功能单元协同处理数据的分布式能力。在此基础上学者们的研究进一步丰富了其内涵。如徐正权等[8]、冯在文等[9]认为互操作性的本质在于不同来源的软件系统或组件在多种环境下的协调运行与信息共享。李玉伟等[11]、李志平等[12]则进一步指出,互操作性不仅涉及通信接口的一致性,还包括对信息内容的理解能力与交互操作的功能对接,体现出从技术互联向语义协同的演进趋势。此外,孟博等[13]对区块链领域的跨链互操作性展开研究,拓展了信息系统的边界,突出其在数据、价值与服务三个维度上的互通能力。
2.军事领域的互操作性定义
军事领域的互操作性定义具有任务驱动与服务导向特征,强调系统、单元或设备在完成特定军事任务过程中所需的信息交互与资源共享能力。DOD将其定义为系统、单位或军事力量之间相互提供服务并有效协同作战的能力,STANAG 4586进一步强调机器人在任务执行中的协同能力与跨系统数据共享机制,GJB 6935—2009则从仿真系统角度定义了模型间服务交换与协同运行的能力。现有研究在此基础上深化了对层次结构与效能目标的理解。国内代表性学者如汤再江等[14]提出的“物理互联—信息交互—语义操作—任务协同”四层结构,揭示了互操作能力从基础设施层向指挥控制层的逻辑递进。伍江华等[15]、徐山峰等[16]则指出,军事互操作性不仅要求信息可交换,更应在体系架构下实现有效服务获取与任务响应,体现出高度的系统集成性与任务适配性。此外,赵鑫业等[17]、石教华[19]强调互操作性的最终目标是提升协同效能,这使其在应用中呈现出高度动态性与场景适配性的特征。
3.电气工程领域的互操作性定义
电气工程领域对互操作性的定义主要集中在异构设备间的协议兼容与控制一致性上,特别是在WPT与智能电网等新兴技术场景下。该领域广泛采纳IEEE的通用定义,强调系统间信息交换与利用能力,并在WPT与智能电网等具体场景中深化应用。学者的相关研究进一步明确了其技术实现机制与系统级价值。同时,张献等[22-23]与陈志鑫等[24]均指出,电动汽车无线充电的互操作性需依赖信息交互和过程控制机制,以确保地面与车载设备之间的高效耦合。周静等[25]、邓杰等[26]则将互操作性上升到电力系统智能协同的层面,认为其本质是实现不同网络组件之间的信息共享与智能控制,从而保障系统的稳定性、灵活性与可扩展性。
( 三 ) 不同领域互操作性定义差异的形成机理
不同领域互操作性定义差异的形成,源于其技术范式、应用场景与标准演进路径的不同。
1.技术范式差异
不同领域的核心目标不同:自动化领域关注模块集成效率;军事领域关注任务响应与安全性;电气工程领域关注协议兼容与能量传输稳定性。这决定了各领域互操作性标准的深度与层次。例如,STANAG 4586强调服务获取与任务执行闭环,而IEC 61850注重通信一致性。这种标准设计的差异化特征是由各领域的任务性质决定的。
2.应用场景差异
自动化领域多为工业环境,而军事环境复杂多变,电气工程系统的复杂性介于两者之间。环境的复杂性影响了互操作性在语义理解或功能协同上的侧重方向。自主船舶编队处于类似军事环境的“半开放系统”,应重点吸收任务协同层的经验。
3.标准演进路径差异
自动化领域和电气工程领域的标准化起步早,体系成熟,军事领域则采用任务驱动的标准制定逻辑,导致其互操作性标准框架从底层到顶层的形成路径不同。
( 四 ) 不同领域互操作性定义的共性
尽管自动化、军事和电气工程三大领域的互操作性在技术范式与应用导向上各具特征,但通过梳理标准定义与学者观点,可归纳出对其认知的共性内核。这些共性不仅体现了不同领域对系统协同运行的基本共识,也为自主船舶编队互操作性体系的构建提供了理论融合路径。
第一,在基础层面,三大领域均强调互操作性以信息交换能力为根基。无论是自动化领域对数据共享的强调、军事领域对通信保障的重视,还是电气工程领域对信息传输一致性的要求,信息在系统间的可用性始终是互操作性实现的前提条件。第二,在语义层面,各领域普遍关注语义一致性与接口规范性。自动化领域通过语法与语义标准 ( 如ISO 16100 ) 实现构件间协作,军事领域通过制定通信协议与服务描述语言统一战术理解,电气工程领域则以协议一致性规范保障设备兼容性,体现了互操作性对信息理解与解释能力的要求。第三,在协同层面,三者均指向系统功能协同的目标。互操作性不仅要求信息可交换,更要求系统具备将所获信息转化为具体服务或任务响应的能力。如军事领域注重战术协同、自动化领域强调功能闭环、电气工程领域强调能控一体,这种从信息互联向能力互补的转化机制是互操作性的深层要求。此外,在互操作性的实现路径上,各领域普遍强调标准驱动机制。标准在接口定义、协议规范与测试验证等环节发挥关键作用,是互操作性由概念走向实践的保障基础。
为进一步呈现三个领域对互操作性定义的共性理解与差异特征,本文构建如图1所示的维恩图,从信息交换、语义一致、任务协同三个维度出发,分析其共性与差异。
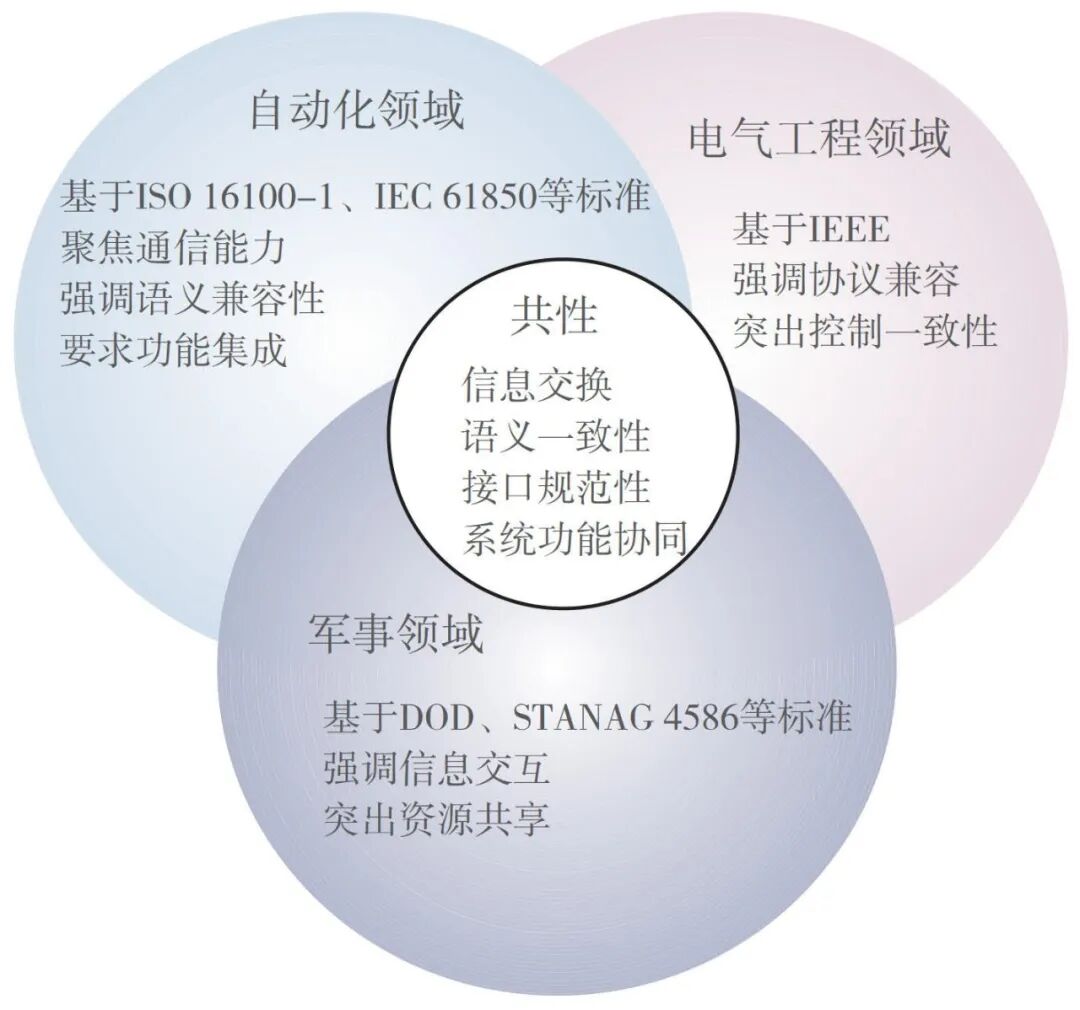
图1 互操作性定义在三个领域的差异与共性
三、自主船舶编队互操作性定义
互操作性不是单一层级的属性,而是信息感知、决策控制、协同执行三层功能得以融合的系统性条件。没有互操作性,单船的感知与控制能力无法实现语义共通与任务协同,因此应将互操作性视为实现编队级协同智能的核心框架。
当前,自主船舶编队的互操作性研究仍处于理论体系构建的初期阶段,其核心定义的形成亟须系统融合自动化、军事和电气工程三大领域的理论精髓。在过去几年里,船舶领域权威机构也对互操作性开展了研究,其中主要有IMO和CCS。IMO在《海上自主水面船舶规则》( MASS Code ) 中将互操作性与互连通性作为核心要求。MASS Code要求:远程导航系统应实时分析当前态势,感知并处理导航与环境要素,预测未来状态;航线与航速的调整计划及决策必须及时制定,并严格遵守船舶安全操作规范;远程导航系统应安全执行航行计划,并提供相应的监控措施。这三个要求集中体现出信息感知、决策控制和协同执行三个环节的重要作用。CCS发布的《智能船舶规范 ( 2024 )》明确指出,智能船舶发展应实现“系统互操作、数据互通、决策协同”的目标,涵盖全生命周期数据共享、多系统协同控制,以及依托数字孪生技术开展仿真验证的能力。
图2构建了自主船舶编队互操作性定义的三层框架:信息感知层、决策控制层与协同执行层。该三层框架分别对应信息互通、语义一致与任务协同三个阶段,体现了从单船感知到多船协同的能力演化路径。其中,互操作性贯穿三层框架,起到“数据共享—语义映射—功能融合”的桥梁作用,因此被视为实现由单船智能向编队智能转化的核心机制。在信息感知层,互操作性体现在多源异构传感器数据的标准化与共享机制,使不同船舶形成统一的环境认知基础;在决策控制层,互操作性通过统一通信协议和接口标准,保证控制指令与决策信息在多平台之间的可识别与可执行,实现单船控制逻辑的可协同化;在协同执行层,互操作性表现为多船间语义一致、任务目标共享与行为协调,形成编队级的联合决策与协作执行。
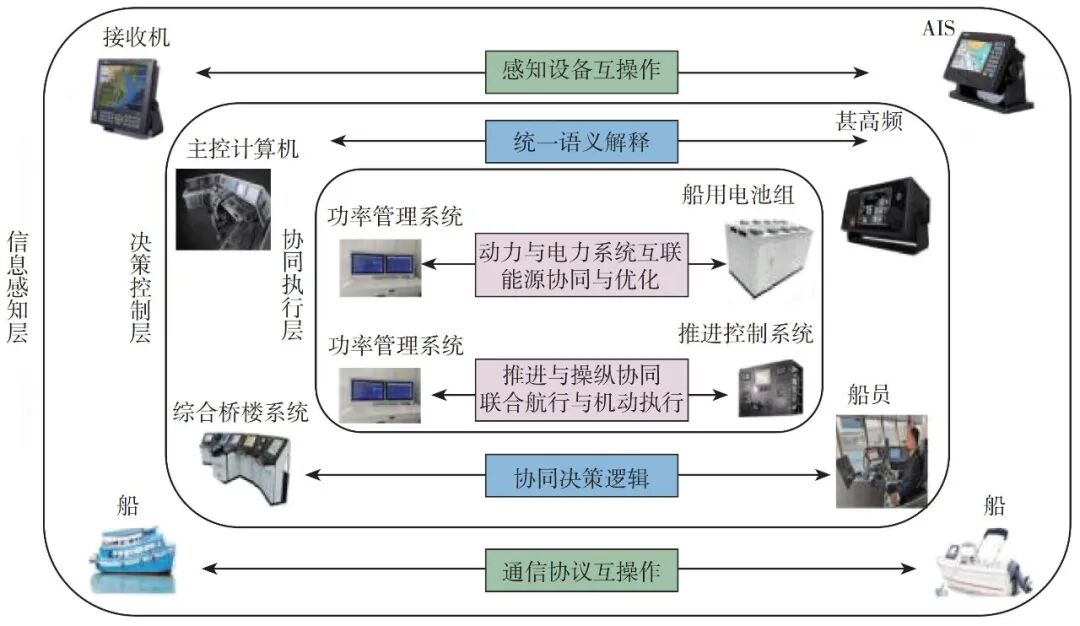
图2 自主船舶编队互操作性定义理论框架图
可见,互操作性不仅是各层功能连接的基础,更是贯穿信息交换、语义理解与功能协同全过程的核心框架机制。其存在使单船智能由封闭式向开放式演进,从而支撑编队级智能的实现。
基于上述分析,可将自主船舶编队互操作性定义为:船舶编队互操作性是指在多艘异构船舶组成的协同系统中,不同平台在通信协议、控制逻辑、感知设备、能源接口等方面实现信息交换、语义理解与功能协同的能力。其核心在于通过标准化接口、统一通信机制与服务协同模型,保障各成员船在动态环境中能够实现感知共享、决策协同与任务联合执行,从而提升编队整体运行的安全性、灵活性与智能化水平。
四、结语
随着智能航运体系加速演进,自主船舶编队已成为提升海上运输效率、应急响应能力与战术部署水平的关键路径。互操作性作为自主船舶编队协同运行的基础能力,已逐步成为智能航运发展中的关键议题。本文在系统梳理自动化、军事和电气工程三大领域互操作性理论与标准的基础上,结合IMO与CCS等权威机构的最新动向,提出了面向异构平台自主船舶编队的互操作性定义。研究表明,推进自主船舶互操作性建设,需借鉴多领域成熟经验,强化标准体系衔接,形成面向多平台协同的统一认识。相关研究可为我国智能航运体系的构建和异构船舶协同机制的完善提供参考。
参考文献:
[1] 柳晨光,贺治卜,初秀民,等.船舶编队控制综述[J].交通运输工程学报,2022,22(4):10-27.
[2] 彭周华,吴文涛,王丹,等.多无人艇集群协同控制研究进展与未来趋势[J].中国舰船研究,2021,16(1):51-64,82.
[3] NOVIMAR Consortium.Vessel train concept—Novimar[EB/OL].(2017-06-01)[2025-10-17].
[4] LIU L,LIU K Y,SHIBASAKI R I C,et al.Assessment of the feasibility of vessel trains in the ocean shipping sector[J].Transportation Research Part D:Transport and Environment,2024,130:104188.
[5] 邵军力,贺雅娟.系统的互操作性[J].火力与指挥控制,1995,20(3):18-23.
[6] 黄柯棣,赵鑫业,杨山亮,等.军事分析仿真评估系统关键技术综述[J].系统仿真学报,2012,24(12):2439-2447.
[7] 唐雪飞,熊萍,刘锦德.异种数据库互操作性:概念及面临的问题[J].计算机科学,1994,21(6):48-51.
[8] 徐正权,张华.基于Web的软件构件互操作性研究[J].计算机应用研究,2002,19(9):48-50.
[9] 冯在文,梁鹏,刘影,等.Web服务描述的互操作性测试研究[J].计算机应用研究,2006,23(11):191-195.
[10] 谢旭,刘晓铖,邱晓刚,等.C4ISR/M&S互操作性研究[J].系统仿真学报,2010,22(11):2532-2536.
[11] 李玉伟,于玮萍,王茜.建立软件能力规范化描述增强互操作性[J].计算机应用研究,2005,22(8):33-35.
[12] 李志平,刘东坡,谢家贵,等.基于星火标识的可信设备互操作机制研究[J].计算机应用与软件,2025,42(3):359-362,397.
[13] 孟博,王乙丙,赵璨,等.区块链跨链协议综述[J].计算机科学与探索,2022,16(10):2177-2192.
[14] 汤再江,徐享忠,薛青,等.指挥信息系统与作战仿真系统互操作研究综述[J].系统仿真学报,2015,27(8):1659-1664.
[15] 伍江华,潘小群.C4ISR互操作框架及信息关系模型研究[J].舰船电子工程,2010,30(1):70-74.
[16] 徐山峰,周翔,王兆伟.数据链系统互操作性管理与保障技术[J].指挥与控制学报,2021,7(1):55-60.
[17] 赵鑫业,苑博,刘鹏,等.面向联合作战的语义参考模型MIM研究与运用[J].指挥控制与仿真,2023,45(4):92-104.
[18] 李硕,方芳,拜丽萍.美军信息系统互操作性研究[J].火力与指挥控制,2016,41(9):6-9.
[19] 石教华.战术数据链互操作性实现方法和条件[J].火力与指挥控制,2015,40(8):136-139.
[20] 郑超,张冰.美军装备互操作性试验鉴定机制与流程分析[J].中国电子科学研究院学报,2021,16(8):827-833,838.
[21] 康乐,张维利,张波,等.基于OPM的数据链信息处理模型和建模技术研究[J].中国电子科学研究院学报,2023,18(1):56-65.
[22] 张献,陈志鑫,沙琳,等.基于三参数表征电动汽车无线充电系统互操作性评价方法研究[J].中国电机工程学报,2022,42(4):1569-1582.
[23] 张献,白雪宁,沙琳,等.电动汽车无线充电系统不同结构线圈间互操作性评价方法研究[J].电工技术学报,2020,35(19):4150-4160.
[24] 陈志鑫,张献,沙琳,等.基于频率调节的电动汽车无线充电互操作性提升方法研究[J].电工技术学报,2023,38(5):1237-1247.
[25] 周静,刘国军,胡紫巍,等.智能电网互操作成熟度模型[J].电信科学,2015,31(S1):239-242.
[26] 邓杰,姜飞,涂春鸣,等.美国NIST互操作性智能电网框架分析与启示[J].电力系统保护与控制,2020,48(3):9-21.
作者简介:
杨雪,大连海事大学航海学院,大连市自主航运安全技术重点实验室,博士,副教授。
刘安培,大连海事大学航海学院,硕士研究生。
章文俊,大连海事大学航海学院,大连市自主航运安全技术重点实验室,博士,教授。
孙旭,中国船级社科创中心,高级工程师。
周翔宇,大连海事大学航海学院,大连市自主航运安全技术重点实验室,博士,副教授。
孟祥坤,大连海事大学航海学院,大连市自主航运安全技术重点实验室,博士,副教授。
*大连海事大学本科教学改革项目 ( BJG-C2024015 )。
本文刊发于《世界海运》2026年第4期,转发须注明作者和原文出处。
编辑部地址:大连市凌海路1号 大连海事大学文源楼515室 ( 116026 )
E-mail:worldshipping@dlmu.edu.cn
投稿网址:hyzz.cbpt.cnki.net
电话:(0411 ) 84729602
传真:(0411 ) 84729692





