 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库海上自主水面船舶(MASS)规则落地,都有哪些内容?

2026年5月,国际海事组织(IMO)海上安全委员会第111届会议(MSC111)正式批准通过《海上自主水面船舶规则》(MASS规则),该规则将于7月1日生效。
这份规则是全球首部针对海上自主水面船舶的统一监管框架,填补了传统海事公约在无人/远程操控船舶领域的空白,更标志着航运业从传统有人驾驶向智能化、自主化转型的关键里程碑。本文从背景、核心原则、主要内容等方面对该规则进行介绍。
自主航行技术在航运领域飞速迭代,从远程操控货船到全自主集装箱船,从沿海试验到跨洋航行,MASS的商业化落地进程持续加速。技术的发展与全球海事监管体系形成矛盾,推动IMO加速出台MASS规则。
(一)传统公约规则的“适配盲区”
现行核心海事公约如SOLAS等,均基于“有人驾驶”的核心逻辑制定,所有条款围绕“船上船员”设计——从配员要求、驾驶台值班、安全防护、应急处置等等,均依赖人工操作。MASS的自主、远程的操作模式打破了这一基础,导致传统规则无法覆盖、甚至冲突,形成监管差距真空。
(二)从探索到落地,IMO的长期布局
早在2017年IMO启动MASS监管范围界定研究,在今年非强制性规则落地,后续将进入经验积累阶段和强制性规则制定
2017-2021年:监管范围界定(RSE):全面评估现有IMO公约对MASS的适用性,明确规则空白与冲突条款,确定了立法方向。
2022-2026年:非强制性规则制定:MSC104(2022年)成立MASS工作组,历时4年打磨草案,2026年5月MSC 111正式通过非强制性MASS规则,7月1日生效。
2026-2032年:经验积累与强制化过渡:规划经验积累期(EBP),通过5年实践完善规则,目标2030年出台强制性MASS规则,2032年正式生效。
MASS规则的制定并非“推倒重来”,而是补充现有规则、兼顾技术中立、坚守安全底线,五大核心原则贯穿全文,成为规则设计的底层逻辑:
(一)补充性原则:不颠覆传统,只填补空白。规则不重复SOLAS等现有公约条款,仅聚焦传统规则无法覆盖的MASS特有场景——如远程操作、自主航行、ROC管理等,作为传统公约规则的“补充文件”,而非替代,确保现有公约规则体系稳定。
(二)目标导向(GBS)原则:重目标结果,不限制技术。采用IMO目标型标准(GBS)框架,内容写到功能要求层面,规定安全目标和功能要求、预期性能,不限制具体技术路径。如要求自主航行系统(ANS)需确保避碰,但不强制必须用激光雷达还是视觉识别等各类手段,给足技术创新空间,适配不同技术路线。
(三)非强制性+过渡性原则:先试行,再强制。现阶段MASS规则为非强制性,各国自愿采用,避免因规则不成熟阻碍行业发展;同时明确2032年强制化实施目标,通过经验积累期(EBP)积累实践数据,逐步过渡为强制性规则,兼顾灵活性与长期确定性。
(四)技术中立原则:以功能代替等级划分。规则没有对MASS自主或远程操作程度进行等级水平划分,针对自主或远程控制功能提出要求,不偏向任何技术路线和现有的分级方法,覆盖各类MASS操作模式,避免技术垄断。
(五)安全底线原则:人命与环境优先。无论自主还是远程,MASS的安全标准不低于传统有人船舶,核心底线有:始终有自然人船长对船舶安全负责,船上有人时船长必须在船,MASS均需确定操作边界(OE),预设后备机制和应急预案,保障人命与海洋环境安全。
MASS规则主要核心内容覆盖适用、定义、证书、程序、原则、公司、人员、各类功能等领域,通过满足通用要求和特定功能要求以保障MASS安全运行。
(一)适用范围
MASS规则适用于SOLAS公约覆盖的货船,即500总吨及以上的国际航行货船,不适用客船、高速船。这一设定兼顾安全与行业需求——客船人命风险极高,技术尚未成熟;货船商业化需求迫切,优先试点更稳妥。
(二)术语定义
通篇新增术语定义44条,涉及MASS、自主(Autonomous)、远程操作中心(ROC)、操作概念文件(ConOps)、操作边界(OE)等,均是规则核心用语,为理解规则提供基础。
(三)新增证书
MASS和远程操作中心(ROC)均要持有证书,并在附录提供了证书模板,检验周期与SOLAS证书周期同步。MASS安全证书,证明船舶自主/远程系统符合规则要求,由船旗国或授权机构签发,附加MASS记录簿,详细记载运营模式、风险管控、系统配置、人机任务分配等信息。ROC证书,为远程操作中心单独发证,证明其场地、系统、人员、通信满足安全要求,附加ROC记录簿,记录控制权限、连通性基础、电力供应等系统。临时证书用于MASS试验测试。
(四)审批程序
基于并遵循IMO替代和等效审批指南(MSC.1/Circ.1455)的主要原则,审批程序包括初步设计、初步设计审批、测试验证、最终审批、运营五个步骤,但不需要依次推进,可以同步开展。明确了MASS的安全评价标准是达到传统船舶同等的安全、安保与环保水平,主管机关可对MASS营运设定约束条件,以维持设计审批阶段确定的安全标准。
(五)风险评估
MASS风险评估贯穿全生命周期,是审批与运营的核心前提,规则对风险评估范围、评估方法、责任主体进行规定。评估范围可以是MASS整体,也可以是单个的自主功能;评估方法推荐了STPA、RBAT、IEC/ISO 31010、IEC 61508等通用方法;风险评估由具备资质的人员开展,对于识别的风险无法消除需要设立相应的应对举措,尽可能的减少风险及影响。
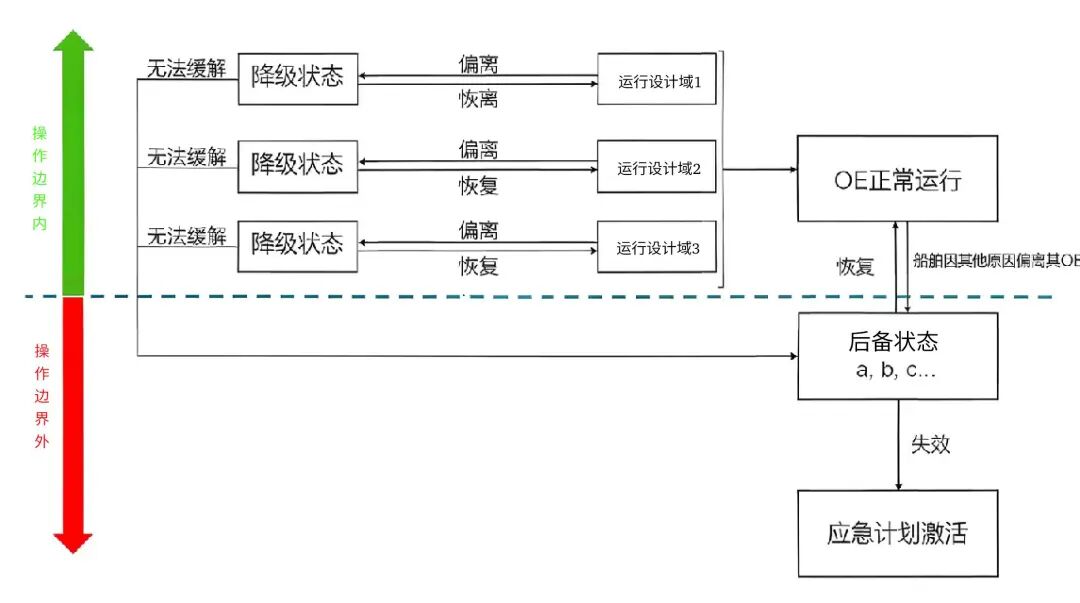
(六)运行环境
运行环境是所有MASS运行的基础前提,明确所有运行限制与应急方案,主要包括操作概念文件(ConOps)、操作边界(OE)、特定系统的运行设计域(ODD)、降级状态(Degraded state)、后备状态(Fallback states)、操作模式以及人员控制与监督,均应作为MASS证书的一部分纳入其中。运行环境各要素关系如下:
(七)安全操作管理
规则第11章是对ISM规则的补充,明确MASS与ROC的安全管理体系(SMS)要求。公司建立适配MASS的安全管理体系,覆盖自主/远程操作、人机协同、应急处置、培训维护、网络安全等场景,对于有远程控制功能的要同时覆盖MASS与ROC,明确双方权责划分。ROC可能不是运营MASS的公司运营,对于专门运营管理一个或多个ROC的公司(ROM公司),也应当建立ROC安全管理体系,持有ROM符合证明、ROC管理证书,满足主管机关要求。
(八)人员方面
人员方面主要包括配员、培训和值班,明确了无论船上人员还是远程操作人员都以STCW公约规则要求为基础。
配员方面,MASS要持有最低安全配员文件(MSMD),ROC需单独制定配员标准并配备合格人员。
培训方面,船上船员除需满足STCW公约的通用资质外,还需掌握自主系统基础操作、远程协同应急、船舶回退状态处置等MASS专项技能;ROC操作员的资质标准不低于传统船员,并有远程操作的额外培训。
值班方面,要求明确各值班人员的权责边界、交接流程与应急响应机制,避免出现责任真空。
(九)航行功能
对于MASS自主或远程航行功能,明确要求需要配备自主导航系统(ANS)和远程航行系统,具备航线规划、态势感知、避碰避防搁浅、航行监控子功能,确保船舶在自主/远程模式下均能安全航行。系统提供航线规划建议,最终航线的使用、修改需经船长审批确认;系统要始终保持足够的态势感知,在操作边界范围内持续监测、分析必要的环境信息;系统应能遵照避碰规则要求采取避碰、防搁浅、防碰触措施;系统具备航行监控、偏离报警,能够被航行控制位置简单、独立越控。
(十)远程操作功能
远程操作功能应设有ROC、远程控制站以确保远程控制安全,明确操作权限转移要求。ROC位置需满足安全条件,配备安保设施、冗余通信链路、备用电源、合格操作人员及数据存储系统。远程控制站需实现与船舶系统的数据互通和操作兼容,能为远程操作人员提供精准数据保障人员履职。禁止多点同时控制MASS,控制权转移不受故障、系统恢复、应急情况影响,不得出现权限冲突或控制真空。
MASS规则批准通过,是航运业智能化转型的里程碑,标志着自主航行从“试验探索”进入“规范发展”新阶段。尽管目前MASS规则为非强制性的,但IMO已设置了2032年强制化实施的目标,未来几年的经验积累期,将是智能航运格局变化的关键期,需提前布局,适配新规则、拥抱新变革。






