 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库水路交通控制全国重点实验室—水域无人系统平台自主航行及协同控制研究进展
发布时间:2026-06-06来源:智能新能源船舶技术创新产业联盟

水路交通控制全国重点实验室—
水域无人系统平台自主航行及协同控制研究进展
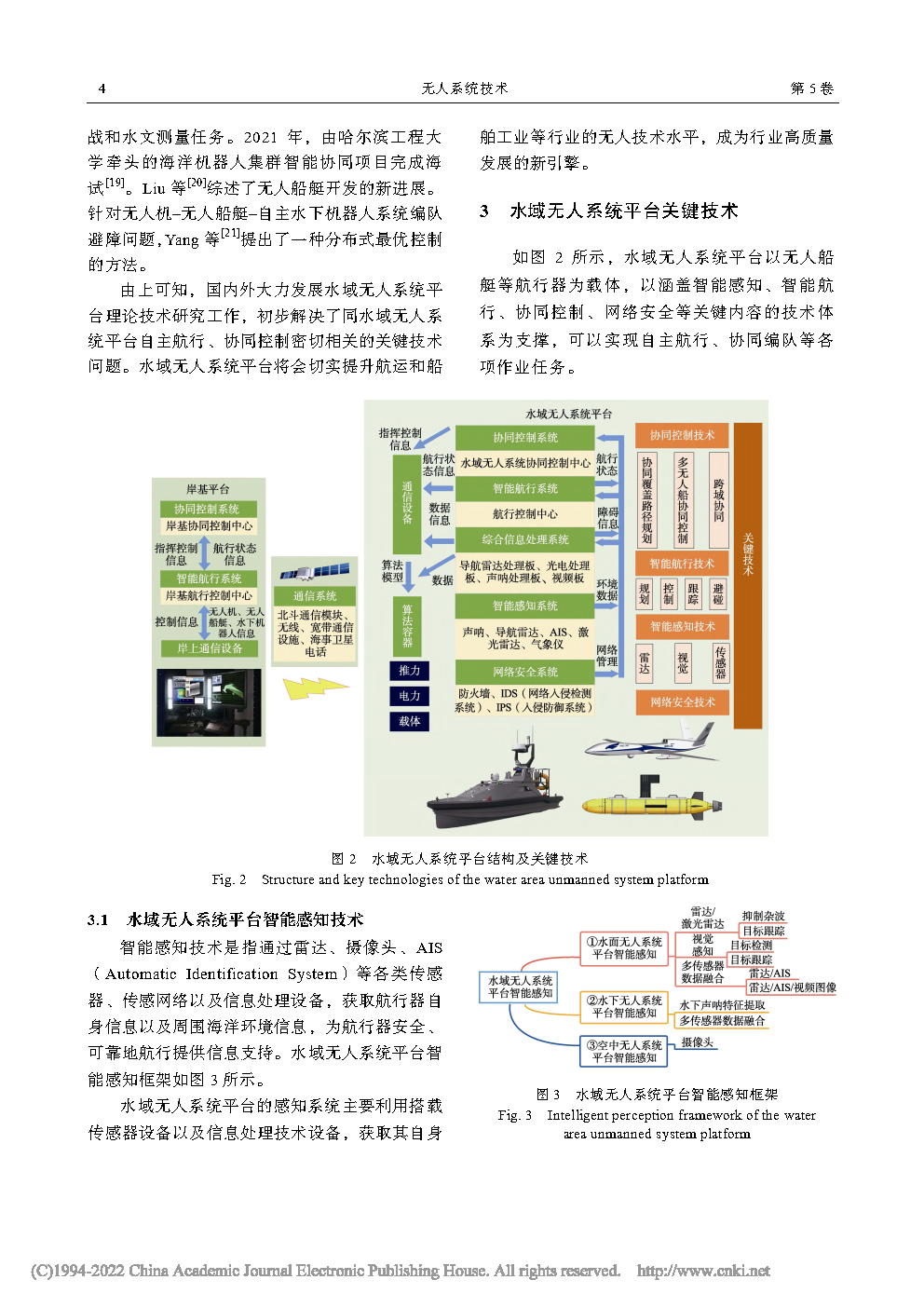
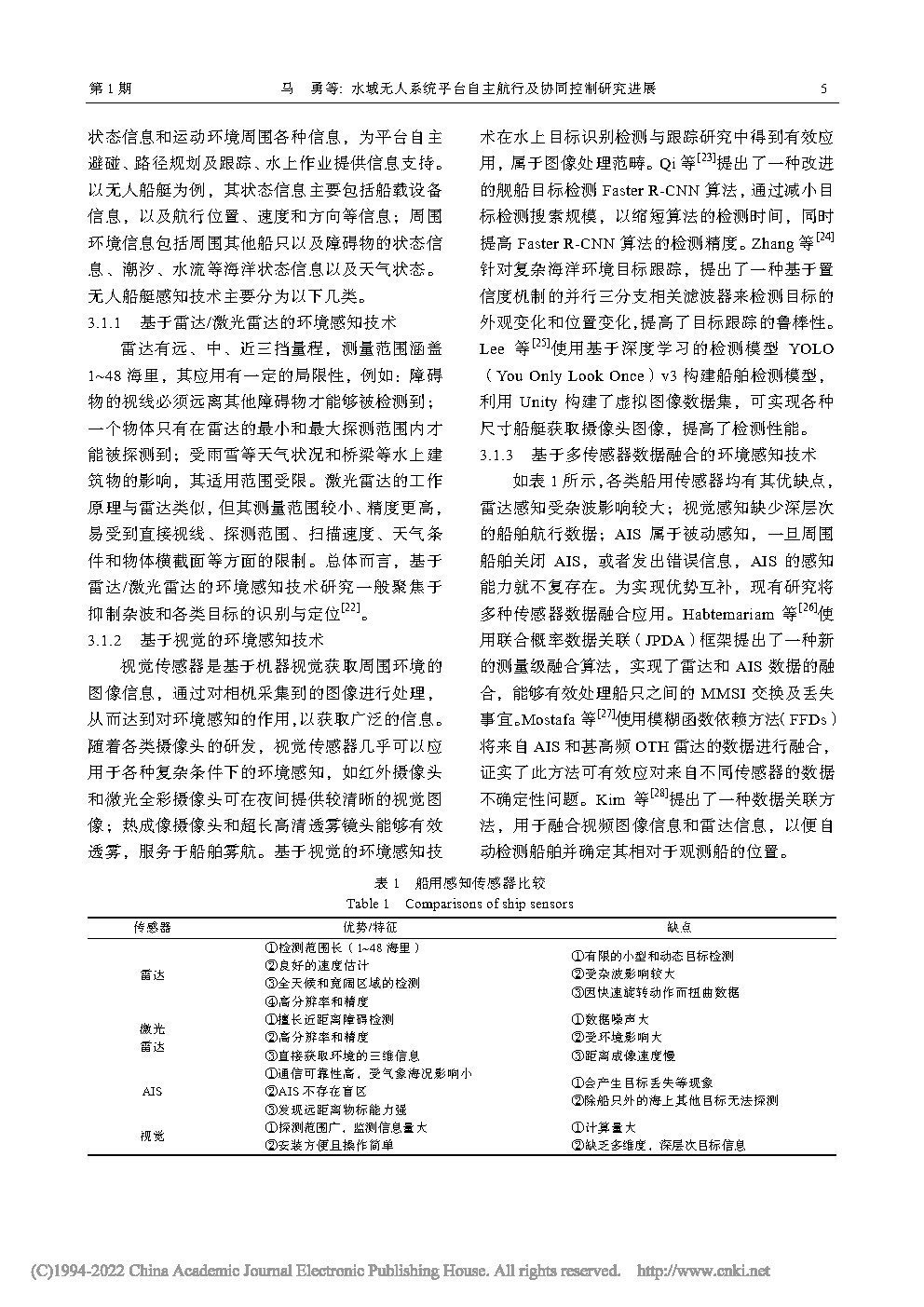
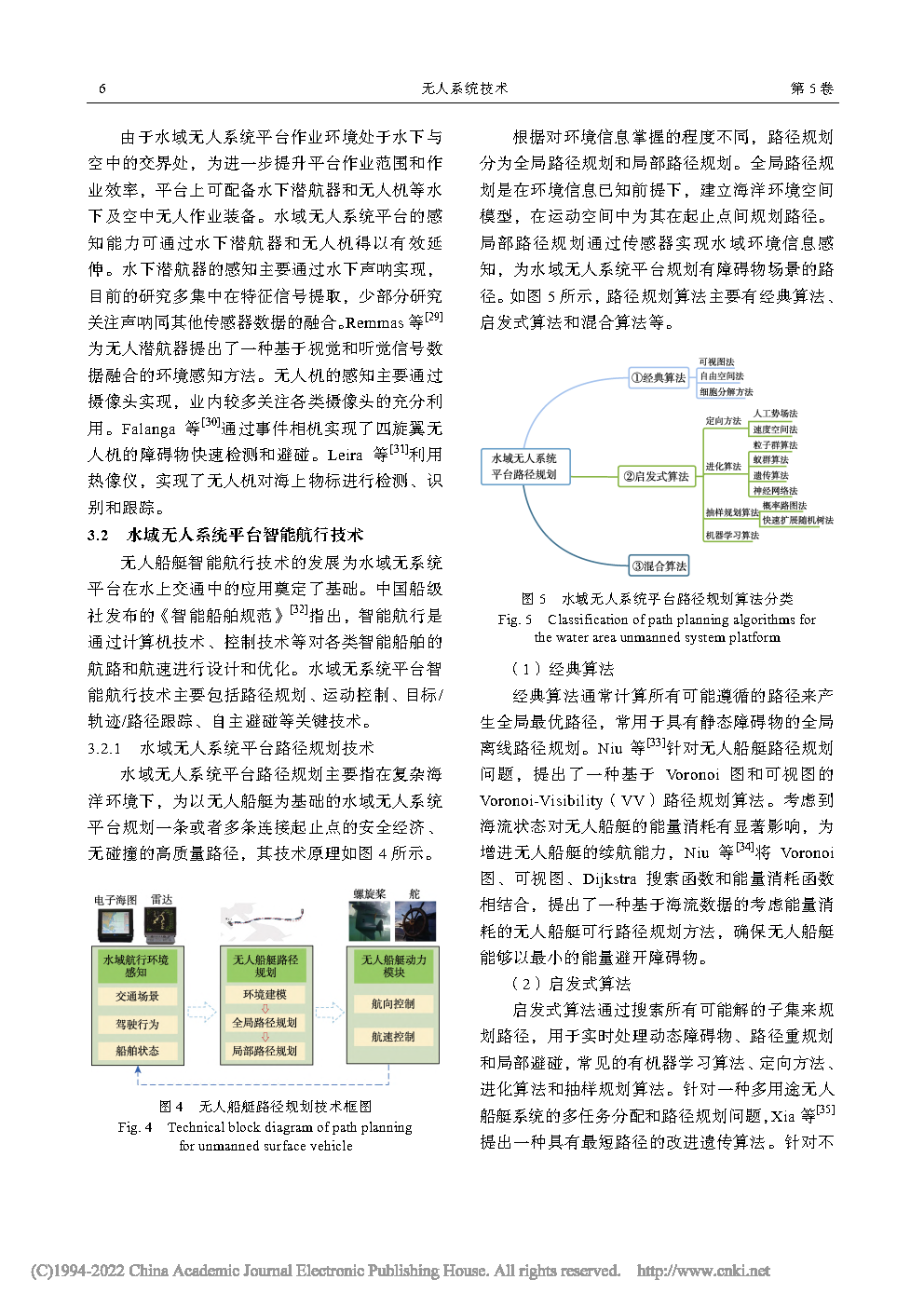
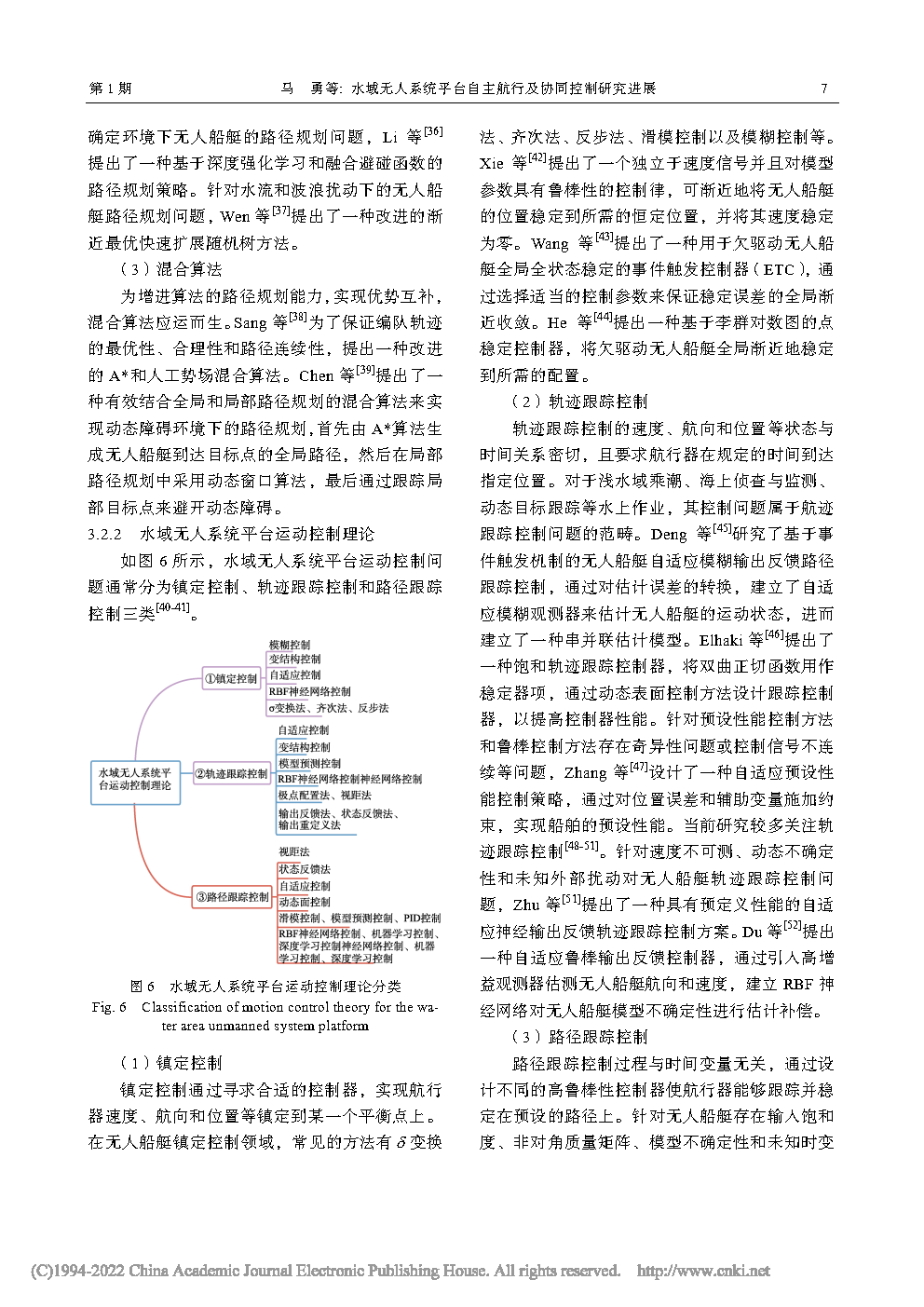
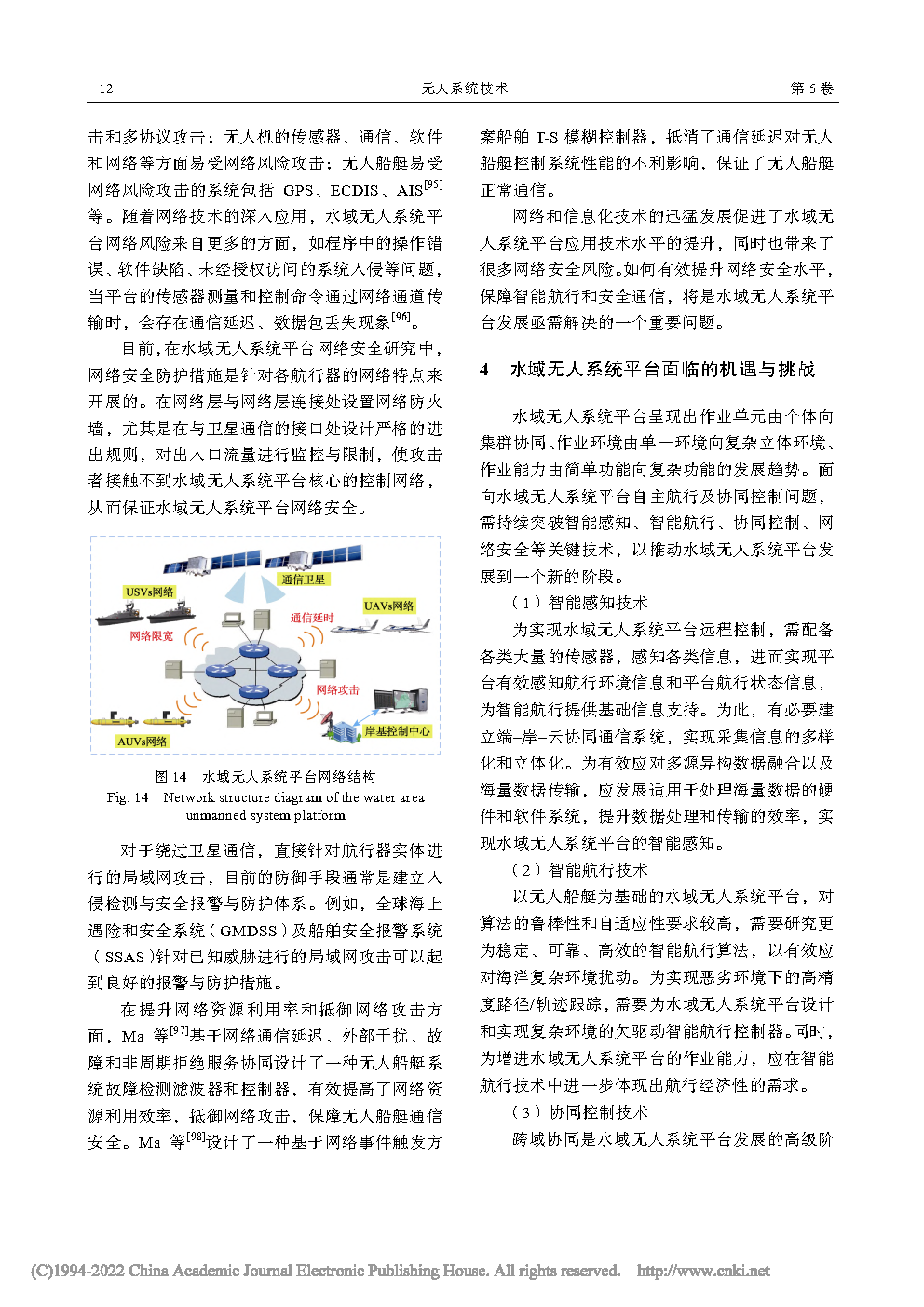
摘要:水域无人系统平台是指可通过远程遥控、无人驾驶、自主航行等方式达成任务的一类平台,涵盖无人船艇及其所配备的无人机、自主水下机器人等。自主航行及协同控制理论技术水平是水域无人系统平台的核心所在,已成为船舶与海洋工程及水上交通等领域的热点研究方向。为掌握水域无人系统平台的自主航行及协同控制方面的发展动态和趋势,综述了水域无人系统平台自主航行及协同控制的研究进展。阐述了水域无人系统平台的研究现状,梳理了水域无人系统平台智能感知、智能航行、协同控制、网络安全等航行和作业关键技术,分析了水域无人系统平台面临的机遇与挑战
关键词:水域无人系统平台;智能感知;智能航行;协同控制;网络安全
中图分类号:U664.82
文献标志码:A
DOI:10.19942/j.issn.2096–5915.2022.1.001
智能新能源船舶技术创新产业联盟秘书处
编辑整理

转载说明:本文系转载内容,版权归原作者及原出处所有。转载目的在于传递更多行业信息,文章观点仅代表原作者本人,与本平台立场无关。若涉及作品版权问题,请原作者或相关权利人及时与本平台联系,我们将在第一时间核实后移除相关内容。





