 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库智能新能源船舶技术创新案例①丨运输船舶区域智能航行控制装备

智能新能源船舶技术创新案例①
运输船舶区域智能航行控制装备
为系统总结最新成果、凝聚产业协同合力,智能新能源船舶技术创新产业联盟持续发起全国性创新案例的深度征集。本次汇编严格遴选了覆盖绿色动力、核心装备、智能驾驶、船岸协同、安全保障等前沿领域的代表性案例。本次活动得到高校、行业科研院所、船舶制造企业、航运公司等单位的积极响应,经过严格评审,最终遴选出10项具有代表性的优秀案例。这些案例集中展现了我国智能新能源船舶从单点攻关迈向全链条融合、从示范验证迈向规模化落地的壮阔进程,为全球水运装备绿色智能转型提供了极具技术先进性与经济社会效益的中国方案。
案例内容
运输船舶区域智能航行控制装备
完成单位:大连海事大学、上海船舶运输科学研究所有限公司、大连博鳐船舶科技有限公司
完成人:张国庆、李纪强、章文俊、姜金辉、董胜利、李博、尹勇、白阳、张显库、关巍
聚焦智能船舶领域国际科学前沿与国家交通强国战略需求,系统化了船舶智能航行控制相关理论探索与装备产品开发工作。本研究成果内容包括:
(1)面向渔区、狭水道、进出港航道等复杂水域环境,解析了多静止、多移动、混合障碍目标与本船运动的交互耦合作用机理,构建了基于COLREGS约束的船舶避障安全域优化模型,在国际上首次提出了不确定水域环境下船舶自主航行避障制导方法,攻克了未知多目标约束下船舶智能制导的工程难题;
(2)围绕大型船舶存在执行伺服约束、欠驱动特性等问题,揭示了主机推进与舵机伺服系统的多端口耦合触发机理,突破了自适应神经网络处理模型不确定及外界环境干扰的作用特点,原创性地设计了考虑执行器配置约束的船舶鲁棒事件触发控制方法,解决了传统控制存在输入能量冗余损耗的行业关注问题;
(3)针对工业环境下可靠装备运行问题,提出了基于总线通信、双主机备份机制的智能航行系统分布式容错技术,自主研发船舶船载端智能航行控制装备(见图1),实现了大洋自主航行、繁忙水域动态避障、非漂移航迹等多模式航行功能,成功应用于包含“新红专”轮在内的20余艘大型商船,成果具有安全、高效、控制性能优良的特点。
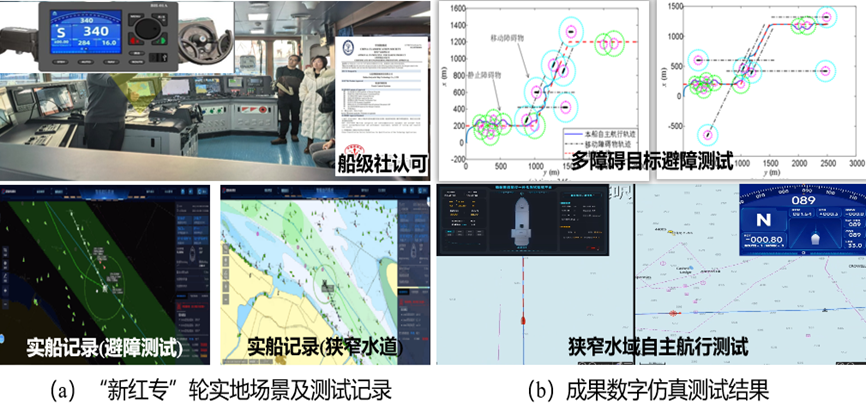
图1 船舶智能航行控制装备建设内容
该成果获得中国船级社船用产品认可,在上海船研所、中船大船产业、大连海大智龙等企业开展推广应用,取得直接经济效益9.96亿元。孵化高科技企业“大连博鳐船舶科技有限公司”,已获两轮轮融资3000万元。授权发明专利46项,其中1项日本授权,1项欧盟国家授权;发布交通运输行业标准2项;发表高水平SCI论文103篇,含IEEE汇刊论文18篇;出版学术专著4部;获教育部自然科学二等奖1项、国家一级学会科技进步一等奖4项。以中国工程院柴天佑院士为主任的专家组评价:项目成果总体达到国际先进水平,船舶区域智能航行控制技术达到国际领先水平。
本成果聚焦中国船级社《智能船舶规范(2025)》针对智能船舶智能航行功能研发需求,结合研究团队相关技术研发积累,针对大型船舶的复杂操纵特性进行机理分析,充分考虑实际航行水域环境下基于航路点设计计划航线、多类障碍目标安全性特征等航行任务层需求,以及执行装置约束、定常风/脉动风、波浪、海流等船海交互层工程环境需求,注重对制导—控制体系架构的实际工程应用方法论的研究。通过机理分析、理论推导、实验验证相结合的研究方法,对动态避障/路径跟踪任务下船舶智能航行制导与控制技术进行深入研究,并研发高性能船载端智能航行控制装备。该成果构建了船舶智能航行“理论技术→装备研发”全过程系统解决方案,推动了船舶智能航行控制技术突破,夯实了我国在智能船舶装备领域的领先根基。本成果具体实施技术路线如图2所示,并为实现此方案制定如下实施步骤:
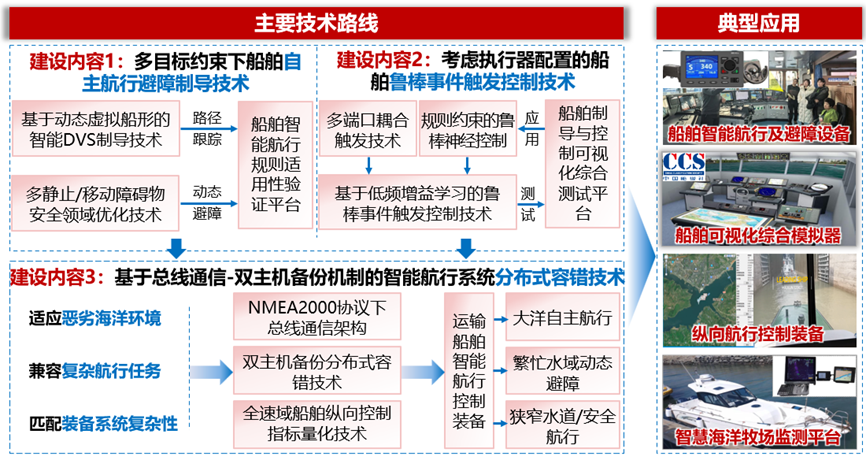
图2 船舶智能航行控制装备研发主要技术路线
(1)基于研究团队已具备实船航行数据,分析符合COLREGS操纵建议的避障操纵机理,建立多障碍目标环境下优化避障制导机制;
(2)建立碰撞风险评判、避障目标选择模型,在已有研究成果“船舶DVS制导算法”框架下,研究面向动态避障/路径跟踪任务的智能DVS制导策略;
(3)针对大型船舶存在速度状态测量不确定问题,设计具有有限时间收敛性能的扩张状态观测器,并根据运动学转换关系重构速度状态估计;
(4)分析模型结构/参数不确定、执行器增益不确定、外界环境干扰与船舶动力学模型、执行伺服系统、运动学模型相互耦合作用机理,设计考虑控制工程需求的路径跟踪鲁棒事件触发控制器;
(5)利用研究团队现有仿真平台基础,搭建船舶制导与控制可视化综合测试平台;
(6)对步骤(2)、(3)、(4)中的理论设计结果,系统开展局部/全局任务仿真测试,完善面向动态避障/路径跟踪任务的船舶智能航行制导与控制系统设计方案;
(7)基于制导与控制一体化设计框架,构建集合主操、副操、中央计算、指令控制等模块的分布式系统设计方案,研发船载端智能航行控制装备原理样机,完成相关软/硬件系统联调及测试验证;
(8)开展成果安装、调试、推广应用工作。
随着物联网、大数据、人工智能等新兴技术的快速发展,船舶智能化、自主化已成为当今船舶制造与航运领域发展的必然趋势,与此同时,船舶控制、船舶营运等相关领域也迎来了新一轮的挑战。然而,船舶海上航行同时面临大惯性耦合运动、航行任务复杂、水域环境多变、恶劣海况干扰、结构化/参数化模型不确定等问题,使其控制系统设计具有极度的挑战性与重大的科学意义。传统的船舶自主航行控制方案具有以下局限性:(1)船舶智能航行系统设计仅考虑单一跟踪功能,忽略了在复杂任务场景下的多模式航行需求;(2)针对具有混合障碍目标特征的未知不确定水域环境态势,未形成满足COLREGS约束的船舶自主航行制导机制;(3)现有的路径跟踪控制方案缺乏针对性的系统能耗优化设计,演绎过程繁杂,难以工程推广。为此,本成果聚焦船舶智能航行控制装备研发存在“避障难”、“控制难”、“长效难”,重点解决3类问题:在国际规则约束下,如何实现船舶自主航行安全性;在复杂海况环境下,如何保障全速域控制精准性;在工业运行条件下,如何保证装备运行长效可靠性。具体解决方案如下:
(1)在国际规则约束下,如何实现船舶自主航行安全性
针对智能船舶研发实践中高精度控制应用场景“计划航线由驾驶员设置航路点确定”,依据实船航行数据挖掘运输船舶操纵与控制规律,率先解析“动态虚拟船形”制导机理,提出了适用于欠驱动水面船舶操纵特征的自主航行制导技术,有效解决伺服系统中主机推进装置、舵机伺服系统存在幅值/速率约束、执行滞后等限制,具有制导精度高、绿色、节能等特点。进一步挖掘了现实航行水域多静止/移动障碍物、混合障碍物与本船运动交互耦合机理,发现了运输船舶避障操纵的本质特征和规律。通过引入对船舶实时航行态势的优化等级配置方案,结合数学演绎方法,提出了基于安全领域优化的运输船舶智能航行优化避障制导技术(原理见图3),会遇局面完备性由80%提升至95%以上,填补了国际上应用型优化避障制导的技术空白,有效支撑了“新红专”轮在狭窄水道、近岸繁忙水域自主避碰航行,显著加快了多场景智能航行装备国产化研发进程。
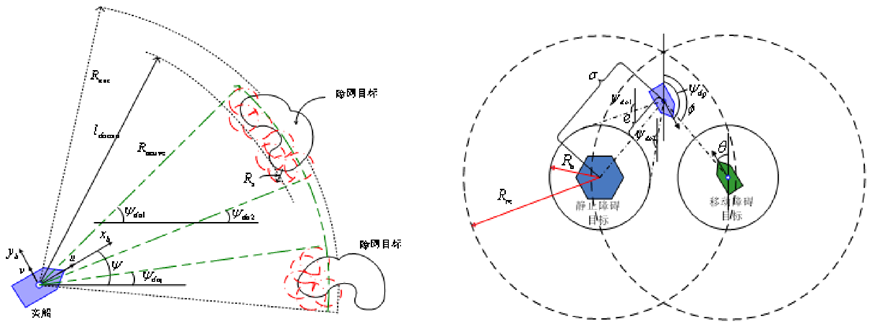
(a)静止目标避障原理 (b)混合目标环境下优化等级配置方案
图3 船舶智能航行避障制导基本原理
(2)在复杂海况环境下,如何保障全速域控制精准性
基于运输船舶运动存在大惯性、非线性、不确定及外界环境干扰等影响因素特征,重点突破鲁棒神经阻尼、多端口事件触发、预设性能控制等关键技术,建立了全速域控制关键性分级体系,包括瞬态调控、稳态静差、干扰抑制、耦合触发性能等;通过有效融合理论设计与经验触发机制,将控制精度提升至10m级,自动转向稳定度提升11.4%。工程应用中,实船测试存在周期长、费用高昂、风险巨大、样本稀缺等特点,是制约我国智能船用装备研发的主要瓶颈。为此,本成果攻克了场景远程感知与混合现实模拟、多源信息融合与传输、船载端设备远程遥控等关键技术,研制了船舶智能航行制导与控制可视化综合测试平台(见图4),拓展了船舶智能航行测试验证新手段,获得中国船级社、挪威船级社最高等级认证,支撑交通运输部交通强国试点任务“无人驾驶货物运输船舶技术研究”顺利通过验收。
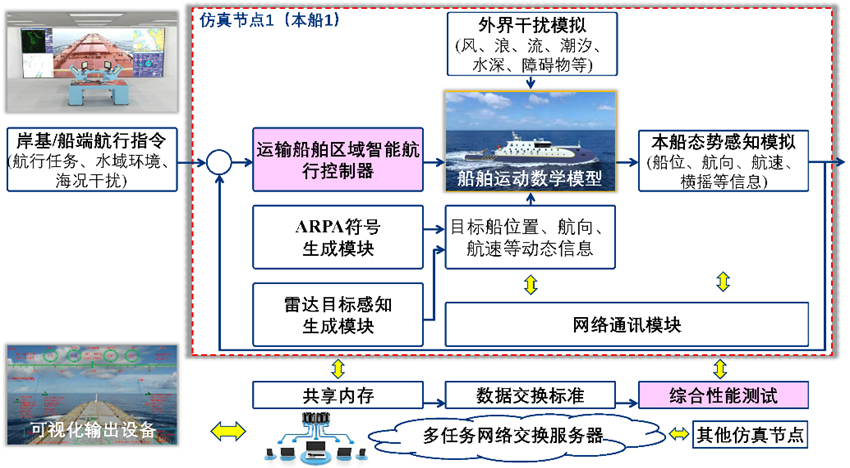
图4 船舶智能航行制导与控制可视化综合测试平台架构
(3)在工业运行条件下,如何保证装备运行长效可靠性
基于制导与控制一体化设计框架,构建了集合主操、副操、中央计算、指令控制等模块的分布式系统设计方案,采用CAN总线通信和NMEA2000标准协议,保证通信节点的确定性收发和对船桥航海仪器接口的兼容性;利用双主机备份技术,发明了智能航行系统分布式容错技术,也是目前保障智能航行装备可靠性的最佳方案。进一步基于Qt Embedded跨平台框架,C++17作为开发语言,利用SQLite DB作为本地数据载体,研发了多进程协同自主的NA01A型船舶船载端智能航行控制装备(工作原理见图1),具有海图解析、感知融合、态势推演、自主避碰、路径跟踪、风险分析等功能,建立了36种典型会遇态势,在大连海大智龙、中船大船产业、海之韵(苏州)等10余家高科技企业,以及“新红专”轮等21艘大型商船上得到应用,累计航行测试520个航次,累计安全航行45万海里以上。三级海况平均横向控制误差小于2.0m,工业强磁干扰下系统可靠性达99%以上。该装备获得中国船级社船用产品认可,突破了国际上对我国运输船舶智能航行控制系统的“卡脖子”技术封锁。
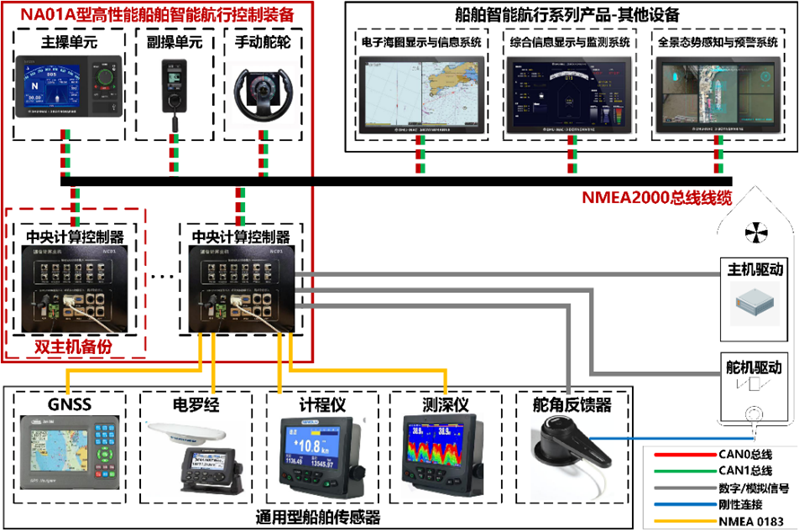
图5 自主研发的船载端智能航行控制装备基础原理
本成果获得中国船级社船用产品认可,与国际同类产品英国SPERRY、日本FURUNO和挪威SIMRAD对比,在功能设置、控制性能、运行性能三方面具有显著优势。在功能设置上,在自主避障决策、分布式容错性能、航行场景适用性等方面优于国际同类产品,具有更加完备的功能和更优秀的适应性;在控制性能上,具有更小的均方偏航角和随机偏航角,零位稳定性更高、平均转舵速度更快,尤其是随机偏航角较国际权威结果低2°;在运行性能上,计算内存显著低于国际同类产品31.5%。功能完备,控制更精准、稳定,既适用于大洋自主航行、繁忙水域动态避障,又可用于狭窄水道等水域安全航行,关键指标显著优于国际一流产品。
2025年2月29日,中科合创(北京)科技成果评价中心对本成果核心技术组织了科技成果评价会,以中国工程院柴天佑院士为主任的专家组一致认为:成果总体达到国际先进水平,其中船舶区域智能航行控制技术处于国际领先水平。
该成果支持了国内首艘结合远程遥控、开阔自主航行与实训等功能的新型船舶“新红专”轮建设,实现实船航路优化和智能避碰功能,支撑了大连海事大学交通强国建设试点任务“无人驾驶货物运输船舶技术研究”项目通过验收。
此外,该成果在造船、航运和海洋工程等领域得到广泛应用,成效显著。中船大连造船厂产业发展有限公司应用船舶智能航行控制系统至18艘新造船舶上,大洋自主航行值班操纵次数降低38%,繁忙水域避障决策时间缩短23%,年节省燃油费用800万元,年均碳排放减少约5000吨。易俐特自动化技术股份有限公司评价,依托该成果技术研发的船舶自适应自动舵操控系统,3级海况下定点控位精度保持1米级,5级海况下能够保持10米级跟踪精度,相关指标优于国际同类产品。浙江佳贝思绿色能源有限公司应用智能制导、鲁棒控制等技术成果研制的新能源船舶自主航行控制系统,推广至20多家企业的智能航行系统,可实现0.5米定位,侧向精度1.0°,30ms级航路规划,三年内新能源船舶业务新增产值约1.6亿元。
本成果的工程示范意义主要体现为以下三方面:
(1)为丰富船舶智能航行基础理论做出贡献。该成果紧密围绕海上智能交通领域国际前沿,突破了船舶自主航行避障制导、船舶智能航行鲁棒事件触发控制、船舶智能航行系统分布式容错技术等关键科技创新,取得了一系列围绕大型船舶智能航行主题的研究成果,为船舶自动化行业提供了新理论、新技术和新方法,极大推动智能船舶领域多学科交叉融合创新与发展。
(2)为推进海上交通创新人才培养做出贡献。依托该成果,项目组注重创新型人才培养,先后指导本科生、研究生参加交通运输工程学科相关的科技创新类竞赛,获得国家级竞赛奖励7项(全国大学生交通运输科技大赛二等奖4项、中国研究生能源装备创新设计大赛二等奖1项、中国国际“互联网+”大学生创新创业大赛银奖1项、入选第12届全国大学生创新创业年会1项)、省部级竞赛奖励1项(第14届“挑战杯”辽宁省大学生课外学术科技作品竞赛)。相关成果受到国内外专家广泛好评,提高了相关成果的知名度,提升了新时代海上交通创新型人才培养水平。
(3)为我国船艇装备绿色发展做出贡献。船舶智能航行控制技术是实现智能船舶自主航行任务的核心技术之一,其应用具有丰富的工程背景,如:远洋船舶自主航行、军用舰船精确跟踪、工程作业无人船定点巡航等。相关装备如何打破国际上发达国家对其核心技术的垄断壁垒,是目前相关行业普遍关注的问题。从本项目成果广泛应用于海军装备、海洋工程、海洋牧场服务等企业的情况表明,该项目成果为推进我国船艇装备绿色发展做出了应有贡献。
成果先后获得重要媒体的关注和评价,中国交通报对高性能船舶智能航行控制装备创新成果进行了专题报道,评价其推动我国绿色船舶智能航行装备发展。完成人中,尹勇教授作为我国首艘全球领先智能研究与实训两用船的技术攻关代表,先后受邀参加央视网与福州市人民政府联合主办的全国重点海洋高校科研成果展示及推介会,及中华全国总工会与中央广播电视总台共同举办的2024年“中国梦·劳动美”专题节目。
案例内容
核心技术装备名称
NAV800A型船舶智能航行控制系统
核心技术装备参数
1.配备10路NMEA0183通信接口,可接入航向源两路、位置源两路、导航仪一路、计程仪一路、测深仪一路、风速风向仪一路等设备;
2.可同时处理周围目标数目不低于20个,并识别目标的类别、方位、距离、速度等信息;
3.具备实时异构传感器数据融合处理能力,可对航海雷达、AIS、激光雷达、微光摄像头等设备识别的目标信息进行配准、关联与融合;
4.防护等级达IP66;
5.满足IEC60945标准规定的环境条件、电磁兼容及特殊试验项目要求。
核心技术装备的特点、创新点及技术先进性
1.模块化通用架构与功能扩展机制:结合智能船舶软件生态需求,进行硬件模块化功能解耦设计,搭建跨操作系统软件平台,研发标准化算法接口与SDK。
2.设备基于国产航运动态控制芯片与工业级主板的硬件平台,支持无人船、散货船等多船型通用。
3.研究核心算法模块化集成方法,支持设备在线刷写不同控制算法,实现航迹控制算法实船验证。
4.设计核心元器件100%国产化、契合船用标准的工业级主板,通过中国船级社硬件可靠性认证。
5.硬件接口层集成RS485、CAN等船用通信接口,通过智能协议网关解析NMEA0183、IEC61162-450等协议,无缝接入环境感知、姿态监控等设备。
智能新能源船舶技术创新产业联盟秘书处
编辑整理






