五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库《Science Robotics》重磅!毫瓦级超声波,让手掌大飞行机器人“穿越”浓雾、黑暗及复杂障碍环境

如果一架无人机在完全黑暗、浓雾弥漫的废墟中起飞,它该如何感知世界?主流方案摄像头和激光雷达通常会在这里集体失效。前者依赖光线,后者在雾中散射严重,完全看不到透明玻璃或薄塑料膜。
但在《Science Robotics》最新发表的论文中,美国伍斯特理工学院(Worcester Polytechnic Institute)的研究团队给出了一个反直觉的答案:用超声波。
他们展示了一款名为“Saranga”的感知系统,放弃了对摄像头和激光雷达的依赖,改用毫瓦级超声波传感器套件。把它搭载在微型自主四旋翼飞行器上,能够让手掌大小的飞行机器人在浓雾、黑暗、积雪以及存在薄而透明障碍物的复杂环境中自主导航。
01.
为什么偏偏是超声波
提起超声波,你可能会想到医院里的B超,或者倒车雷达。但在高速飞行的空中机器人上,超声波几乎被公认为难堪大用,它探测距离短、分辨率低,更要命的是,机器人的螺旋桨本身就是个巨大的噪声源,足以让任何微弱的回声信号淹没在噪音里。
然而,研究团队注意到了自然界中的一个现象。体重仅2克的熊蜂蝙蝠,在黑暗、多尘的洞穴中,仅凭超声波回声定位,就能探测到8毫米大小的物体,飞行得比许多带眼睛的动物还要稳。
这给研究者带来了一个启发。超声波并非不行,而是之前没能像蝙蝠那样,把它的潜力发挥到极致。问题的核心,在于如何从极低的信噪比中“听”清障碍物。
02.
如何让机器人“听”清世界
Saranga系统的解决方案,是一套“物理降噪+深度学习听声”的组合拳。
首先,研究团队在螺旋桨和传感器之间,巧妙地增加了一个物理屏蔽结构。这个小小的改动,直接阻挡了大量螺旋桨产生的超声波频段噪声,让回波信号不再被完全淹没,有效探测范围从1米直接提升到了2米。
但这还不够。在复杂环境中,微弱的回声依然会被各种干扰所掩盖。于是,研究团队引入了一个名为 Saranga的深度学习神经网络。这个网络的作用,就像给无人机装上了一副智能助听器。
他们训练这个网络,让它能从长达0.82秒、包含32个连续测量周期的历史回波序列中,识别出那些被噪声包裹的、真正的障碍物信号。
更绝的是,他们创造了一套合成数据生成流程。先用数学模型模拟出理想的干净回波,再灌入真实采集的螺旋桨噪声,生成海量的带噪训练数据。这样一来,网络在投入实战前,就已经在虚拟世界里见过了各种复杂情况。
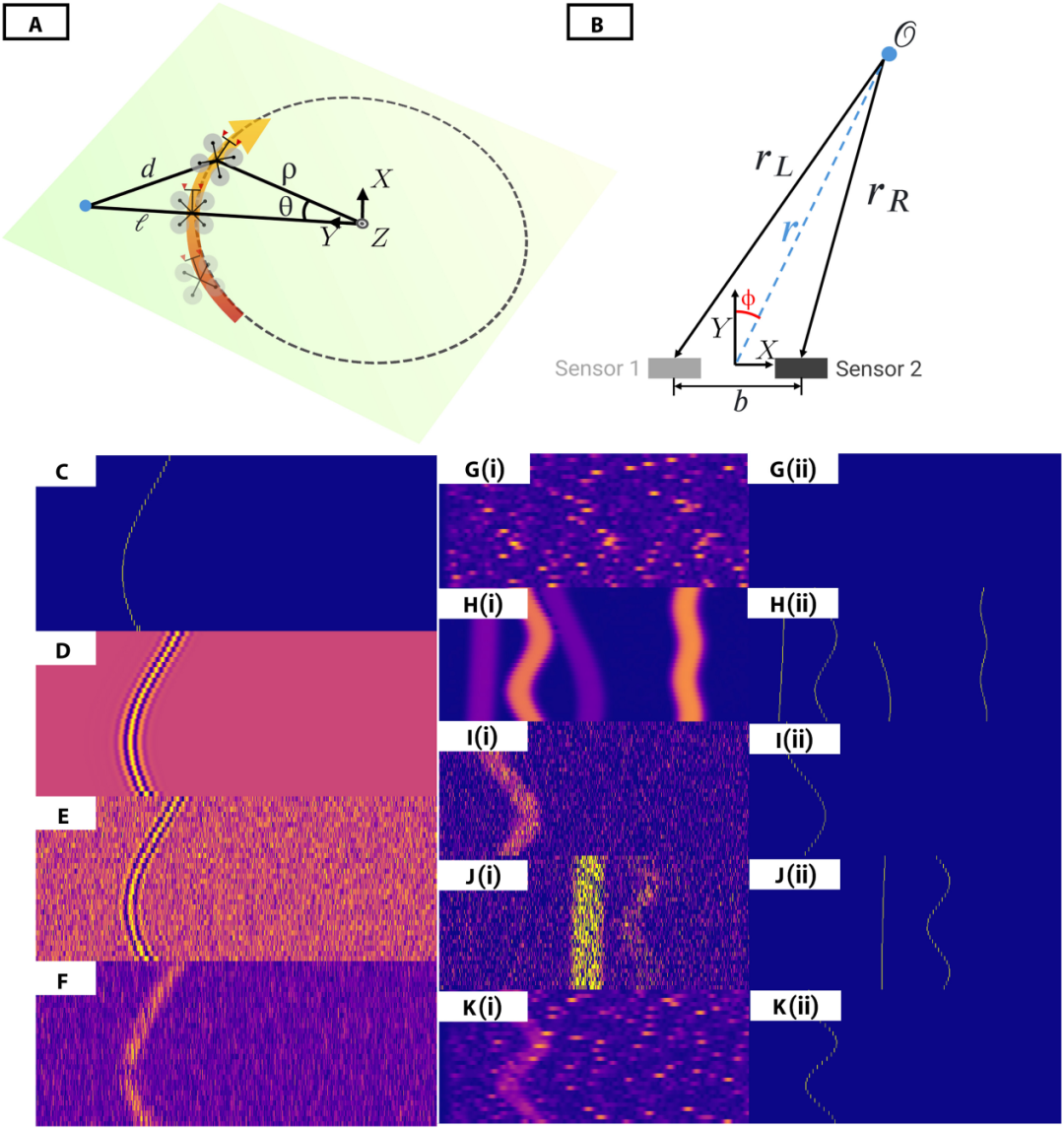
Saranga 网络训练的合成数据生成流程
另外值得注意的是,这个传感系统的功耗只有1.2毫瓦,远低于一个普通LED灯泡。
03.
专克“视觉杀手”的硬核实验
为了验证这套系统的真实能力,研究团队在伍斯特理工学院搭建了室内外多种测试场景。实验平台是一款名为PeARBat160的定制四旋翼飞行器,对角轴距160毫米,总重460克。
它搭载了两个TDK InvenSense ICU30201低功耗超声波传感器,视场角达140°×57°,所有数据处理都在机载的Google Coral Mini开发板上完成。值得一提的是,所有避障操作仅依赖这两个前置超声波传感器和Saranga算法,未使用任何外部定位设施。
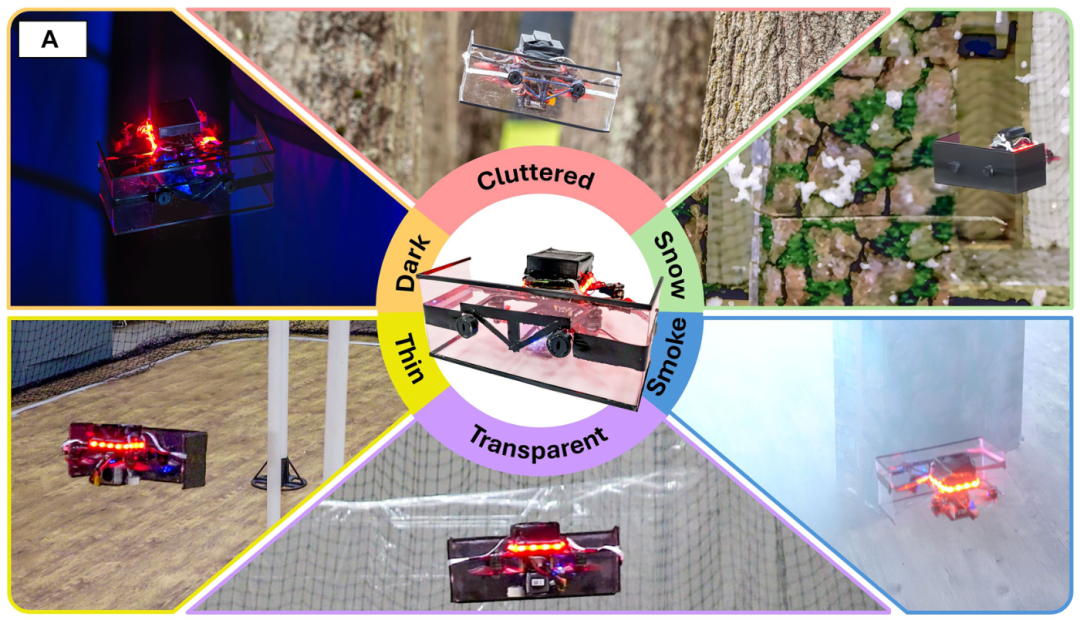
研究团队设计了一系列障碍赛道,包含圆柱、立方体、透明物体、细杆等多种障碍物。每个场景至少进行20次试验,成功标准是完整通过赛道且不发生任何碰撞。为了证明这套系统,所有室内实验都在伍斯特理工学院一个11米×4.5米×3.65米、配有防护网的专业测试场地完成。在六类极端场景中,飞行器的表现令人欣喜。
透明障碍物
当面对厚度仅0.02毫米的透明塑料薄膜时,即便是76-81 GHz的雷达系统也无法探测。搭载传感系统的飞行器在22次试验中,成功率达到77.27%。

薄障碍物
细小的PVC或铝制杆件(直径仅2-6厘米)反射信号极弱。飞行器在21次试验中,系统成功率为80.95%。
人造雪环境
整个飞行区域被造雪机覆盖,障碍物随机分布。飞行器在20次试验中成功15次,成功率75%。
浓雾环境
两台雾机制造的浓雾使摄像头能见度低于0.75米。20次试验中飞行器成功18次,成功率90%。
光线昏暗环境
在仅0.2 lux的极暗环境下(相当于无月光的夜晚),三个半透明游戏隧道随机摆放。飞行器20次试验全部成功,成功率100%。

杂乱场景
为模拟真实世界的复杂性,团队构建了一个由六个不同形状、材质的障碍物组成的密集赛道。任何直线飞行都会导致碰撞。飞行器在23次试验中成功16次,成功率69.57%。
3D避障
这是对系统能力的终极考验。在一个包含水平、垂直和倾斜障碍物的复杂三维空间中,叠加弱光、浓雾和雪三种恶劣条件,Saranga仍完成了16次成功飞行(共22次试验),成功率72.7%。
户外测试则搬到了室外森林环境中,面对的是形状不规则、反射信号更弱的真实树木,以及风力等不可控因素。在三种不同树木密度的森林中,系统分别取得了90.9%、77.3%和85.7%的成功率。



此外,研究团队还将Saranga与另一种超声波避障方案BatDeck进行了直接对比。在相同的复杂室内环境中,BatDeck在17次试验中仅成功通过1次,而Saranga在相同条件下成功完成了13次。
从速度测试来看,当目标前进速度从1米/秒提升到2米/秒时,成功率从100%降至72.73%。这符合预期,也说明系统仍有优化空间。
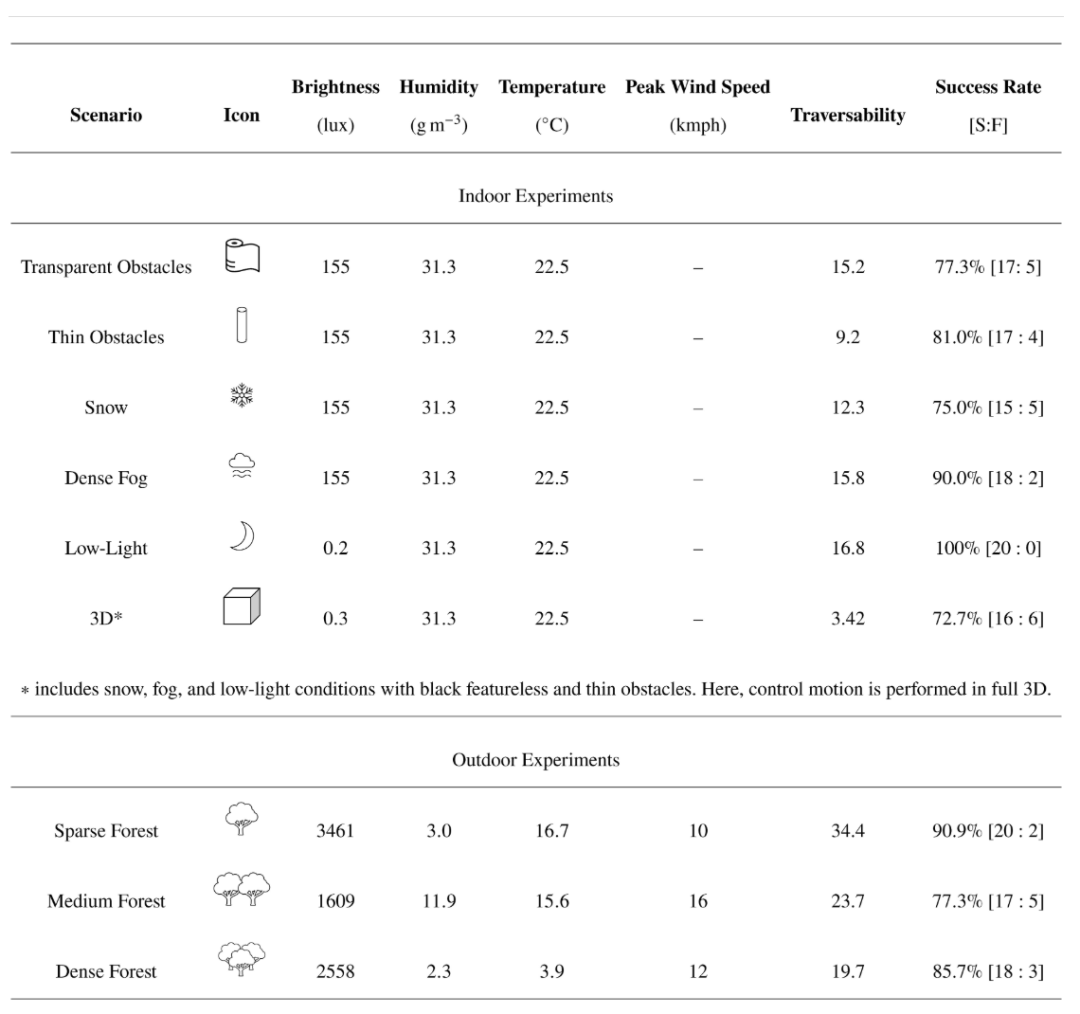
在各种具有挑战性的场景(包括不同的障碍物和环境条件)下的导航性能
04.
重新审视感知范式
Saranga的成功,不仅仅在于它让一款巴掌大小的空中机器人在恶劣环境下重获“视觉”。它更像一个信号,提醒整个机器人领域需要重新审视那些被“主流”技术遗忘的传感器。
当前自主系统的感知方案,从无人机到自动驾驶,往往默认选择摄像头和激光雷达,遇到问题时再想办法修补。但Saranga提供了一种不同的思路。选择传感器,首先应考虑它在目标环境下的物理信号可靠性,而不是技术潮流。把旧传感器和新的计算技术,如深度学习、时间序列模型结合起来,或许就可以重焕生机。
正如论文所言,与其为罕见的极端情况堆砌更重、更耗电的传感器,不如增加一个低功耗的传感模式,用最小的成本换取系统整体鲁棒性的巨大提升。
论文链接:https://www.science.org/doi/10.1126/scirobotics.adz9609
END


工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 阿童木机器人 | 极智嘉 | 海康机器人
服务与特种机器人企业
亿嘉和 | 晶品特装 | 七腾机器人 | 史河机器人 | 普渡机器人 | 施罗德机器人 | 库犸科技MAMMOTION
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技 | 智身科技 | PNDbotics | 卓益得机器人 | 鹿明机器人 | 擎朗智能| 伽利略GALILEO
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 戴盟机器人| 视比特机器人| 星海图 | 月泉仿生 | 零次方机器人 | 中科深谷 | 智平方 | 大咖机器人 | 灏存科技| 具识智能 | Xynova曦诺未来 | 非夕科技 |未来动力 | 博登智能 | 千诀科技 | 灵生科技 | 集萃智造 | 欣佰特科技 | 晨昏线科技 | Dexmal 原力灵机 | 优理奇
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 水木东方|康诺思腾 | 迪视医疗
上游产业链企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 鑫精诚传感器 | 蓝点触控 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 因克斯 | 巨蟹智能驱动 | 凌云光 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代 | HIT华威科 | 星汇传感 | 凌迪科技 | 泉智博