力控人形机械臂龙头,如何重塑量产法则?
发布时间:2026-04-04来源:人形机器人洞察研究
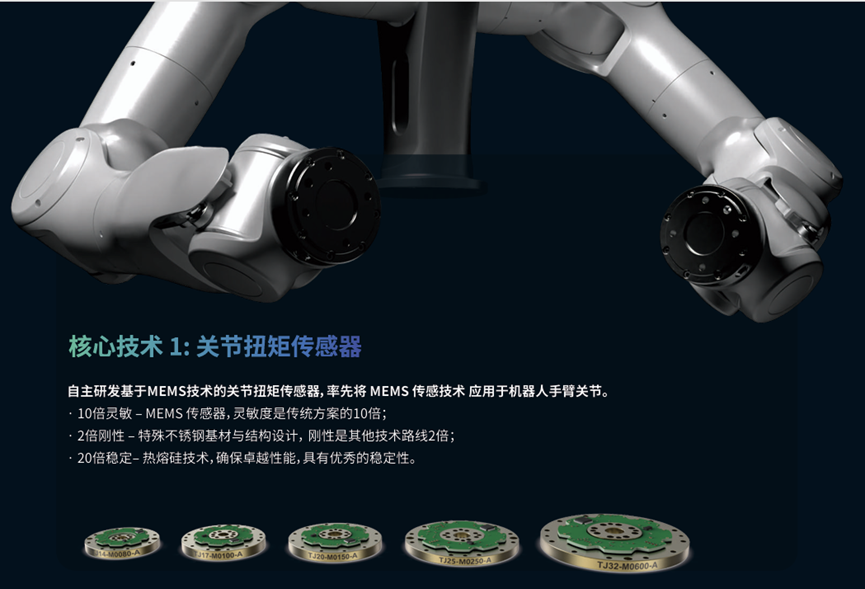
当软件大模型呈指数级爆发,物理世界的执行硬件正悄然成为制约具身智能走向通用化的最大掣肘。前沿算法虽能理解复杂的语义指令,但在接入真实世界的机器人本体时,往往在最基础的力量控制,柔性抓取与精密装配中面临严重的物理失真。硬件本体的系统可靠性、力控柔顺度以及规模化量产能力,已成为决定相关企业生死存亡的试金石。根据第三方机构及市场公开数据,在全球力控人形双臂机器人领域,天机智能凭借旗下Marvin系列产品的强劲表现,2025年在四个月内完成超2,000台的力控人形双臂真实交付,是当年第一家量产交付且出货量最大的品牌。2026年仅开年(截止3月底)的订单量便已突破万台大关。这是一个极具产业穿透力的数据,毫无争议地确立了天机智能在全球市场中的核心地位。在众多具身智能企业依然停留在单台样机调优或是百台级试产的当下,两千多台的真实交付量不仅标志着商业主导地位,更意味着其底层技术已经完成了从实验室走向残酷工业现场的终极验证。从2025年央视报道中Marvin展现的0.1N·m精度的力控弹壳雕刻能力来看,其底层技术已然彻底跨越了生硬的轨迹模仿阶段,迈向了真正意义上的自主柔性控制。配合定位精度精准至头发丝直径0.1mm级别的高速视觉成像系统,其全自动化打磨工作站的运转效率更是达到了人工的十倍。天机智能作为国内工业机器人+具身智能领域的领军企业,长期深耕于高精度力控技术,从一开始就将研发利刃直指机器人物理交互的核心痛点,即对环境的安全感知与高频柔顺控制。Marvin系列能突破重围,其核心技术壁垒在于革命性的全关节MEMS力矩传感器技术。天机智能颠覆了传统的感知硬件范式,是全球第一个量产并将MEMS力矩传感器应用于机器人手臂关节的公司。通过联合国内智能传感器头部企业进行深度技术攻坚,成功开发并规模化量产了基于MEMS硅基应变片与玻璃微熔工艺的力矩传感器。这种先进的底层感知硬件带来了压倒性的性能飞跃。相对于行业普遍使用的传统传感器,该MEMS力矩传感器的灵敏度是传统方案的10倍,抗冲击能力提升4倍,且蠕变低,具备更加优秀的响应特性。更关键的是,它无需频繁校准,能够长期稳定运行,完美契合人形机器人24×7小时不间断工作的严苛需求。这种感知能力的代差,使得机械臂不再是僵硬执行点位指令的金属骨架,而是拥有了类似人类肌肉纤维般的敏锐触觉,能够实时感知每一个关节极微小的扭矩变化。在高柔顺性表现上,Marvin系列展现出了极高的工程造诣。凭借其背靠安川电机的百年品控基因与长盈精密的消费电子级量产能力,天机智能用五大硬核参数诠释了真正的“工业级”力控和精度。关节力控绝对精度≤0.3N·m,这意味着机器人可以精准感知到一颗草莓的硬度
力控平移刚性已达到15,000N/m,远超行业平均水平,确保高负载作业下的高跟踪精度
关节模组扭矩分辨率≤0.01 N·m,在精密装配场景中能够像外科医生般细腻
关节模组力矩环带宽最高达160Hz,位居行业最高水平
在全新的拟人构型和轻量化设计下,依然能做到重复精度±0.03mm与绝对精度1mm的工业级表现。
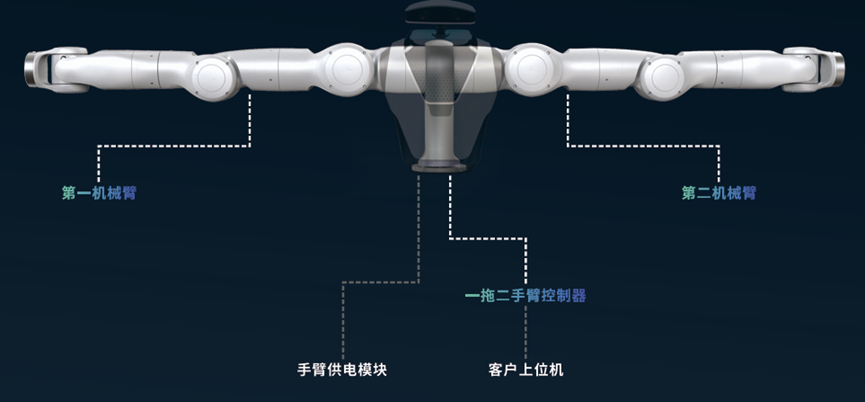
其轻量化一体化关节模组配合阻抗控制动态跟踪算法,机器人能够像人类一样探索未知世界,在人机交互场景中表现出极其自然的顺应性,大幅减少对外部环境的冲击力并提升安全边界。为了追求极致的拟人化运动,Marvin的腕部创新性地采用了七自由度仿人十字交叉轴设计。这种设计完美复刻了人体腕关节的生物力学结构,彻底避免了传统设计的自由度退化问题。其更小的回转半径使得抓取姿态的调节对关节空间位置影响极小,显著提升了远程遥操作时的场景适应性与自然度。在易集成性方面,天机智能Marvin系列采用了同负载级别中最轻的力控模组设计,支持模块化快速搭建,极大提升了工业部署效率。在系统架构上,天机智能推出了一拖二控制器方案,仅需一台小体积控制器即可同时平稳驱动两条手臂。整机大中空的线缆内置设计,不仅能快速搭载双目相机,更有效避免了外部线束与环境物体的干涉摩擦。这种底层感知与新型的融合,直接转化为应用场景中的降维打击。以3C精密装配环节为例,柔性排线插拔、屏幕贴合、极小间隙的非标件组装等复杂工序,对接触力的公差要求苛刻到克级,传统工业机器人极易因累积误差造成物料损坏或良率崩塌。Marvin凭借极高的力控精度、毫秒级的碰撞检测响应以及阻抗控制带来的柔性调整能力,完美填补了这一自动化空白,有效避免了操作对象的物理损坏。在具身智能开发赛道,天机智能提供二次开发接口,将手臂的一些复杂功能进行接口化,开发者无需再为硬件的底层动力学抖动耗费精力。通过全系开放的Fusion运动控制接口,位置、力、刚度等小脑控制参数被全部开放为标准API,系统能够自动将高级指令转换为电机的力矩控制参数,使开发者能将前沿的视觉大模型与底层的控制算法无缝融合,大幅缩短从虚拟仿真到真实物理世界迁移的研发周期。极致轻量化与重载突破:M6 Lite与M20重塑应用矩阵
面对日趋复杂的具身智能落地需求,天机智能于2026年正式推出了Marvin M6 Lite与Marvin M20两款全新产品,以极为优秀的物理参数拉开了行业技术代差。在人形机器人的应用场景中,轻量化直接决定了设备的移动能耗、续航时间与综合安全性。Marvin M6 Lite整机自重仅为8公斤,却能承担5公斤的额定负载,负重比达62%,在力控臂中是绝对的行业领先水平。相较于市面上部分自重通常是负载2-3倍(负重比33%-50%)的竞品,M6-Lite彻底甩掉了沉重的能耗包袱。这一突破依托于深度一体化关节设计与极限的材料优化,减速器、电机与传感器被高度微缩至单一模组内,裁减了大量冗余结构件。极致的轻量化让人形机器人的物理躯体更趋近于人类环境的合理存在,为其大规模普及提供了硬件基础。除此之外,经典的Marvin M6型号也进一步衍生了800mm和900mm臂长的机型,以满足更多高要求场景的部署需求。针对高强度搬运与重型装配场景,Marvin M20则构建了工业级力控的新标杆。自重30公斤,单臂额定负载跃升至20公斤,双臂协作最大负载更高达50公斤。同时,M20还衍生了16公斤额定负载、1400mm臂长的机型。这款设备不仅打破了力控机械臂难以承载重物的偏见,更直面了双臂协同控制的终极技术壁垒。双臂协同绝非两只单臂的物理拼凑,其核心挑战在于两只手臂必须在毫秒级别保持严格的时间同步,并在极度复杂的实时运动学解算下进行空间规避与任务级协调。依托一块主板控制双臂的独家架构与内置双臂协调控制算法,天机智能的算法自主接管了繁杂的底层同步与防碰撞机制。客户不再需要从零编写庞杂的代码,直接调用双手协调抓取等高级指令便能完成部署。为了赋能AI大模型的数据训练,天机还全新推出了Marvin Pro固定式高精度双臂遥操数采平台。该平台标配头部3个相机与腕部2个相机,搭载Nvidia Jetson Orin AGX 64G算力,并支持ROS2以及KernelMind-Apex VR遥操系统,让模型的高效训练与高质量数据采集变得越来越简单。天机智能以真实的交付数据与极限感知精度,为整个具身智能产业打造了最稀缺的工业级小脑与高性能肢体。凭借完整的力控产品矩阵,天机智能正持续定义人形双臂机器人跨越模拟与现实鸿沟的标准。
转载说明:本文系转载内容,版权归原作者及原出处所有。转载目的在于传递更多行业信息,文章观点仅代表原作者本人,与本平台立场无关。若涉及作品版权问题,请原作者或相关权利人及时与本平台联系,我们将在第一时间核实后移除相关内容。
 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库