特斯拉Optimus膝盖仿生设计公开,但确是小鹏用过的技术?
发布时间:2026-04-11来源:人形机器人洞察研究

温馨提示:扫描文末二维码,加入知识星球,免费下载2400+行业报告(包含海外投行报告);商务和研究咨询合作请联系16620948826(同微信)人形机器人的规模化落地始终面临着高昂硬件成本与极限功耗的双重压制。特斯拉最新公开的专利US20260097493A1提出了一种极具实用主义色彩的机器人膝关节总成方案。该方案没有盲目堆砌大扭矩电机,而是巧妙提炼了人类膝关节内部的生物力学结构,用极简的单一直线驱动器实现了极大的运动范围。这种依靠顶层机械设计优化来大幅削减驱动元件数量与系统能耗的思路,高度契合了当前科技产业必须通过降本增效与精细化运营穿越周期的战略诉求。
专利核心发明
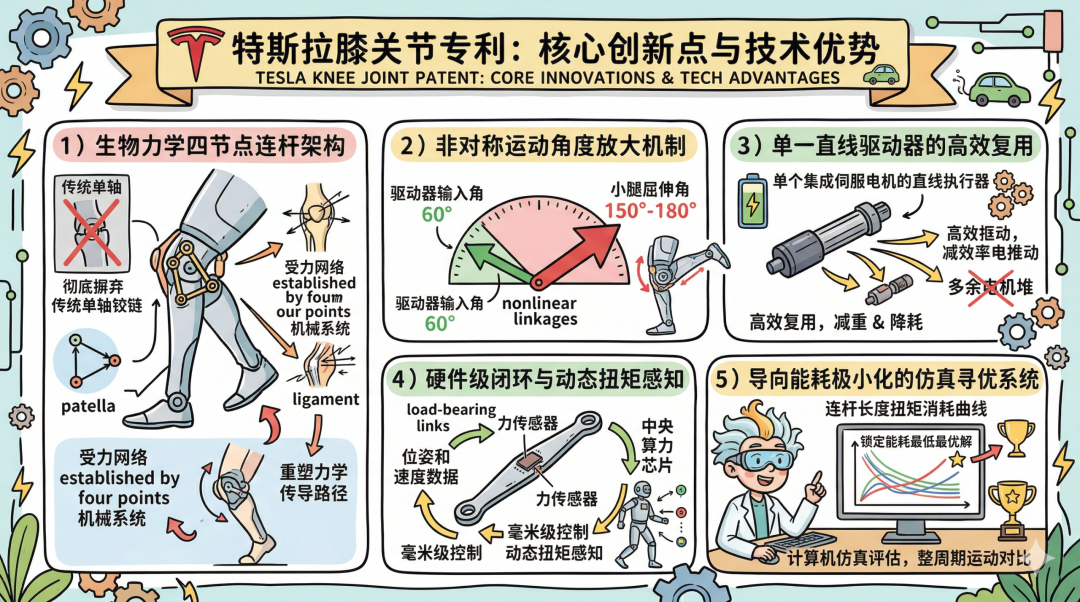
生物力学四节点连杆架构:彻底摒弃传统机器人单轴铰链的粗暴几何设计,通过重构人类膝部髌骨与相关韧带的受力网络建立四点机械系统,重塑了整个关节的力学传导路径 。
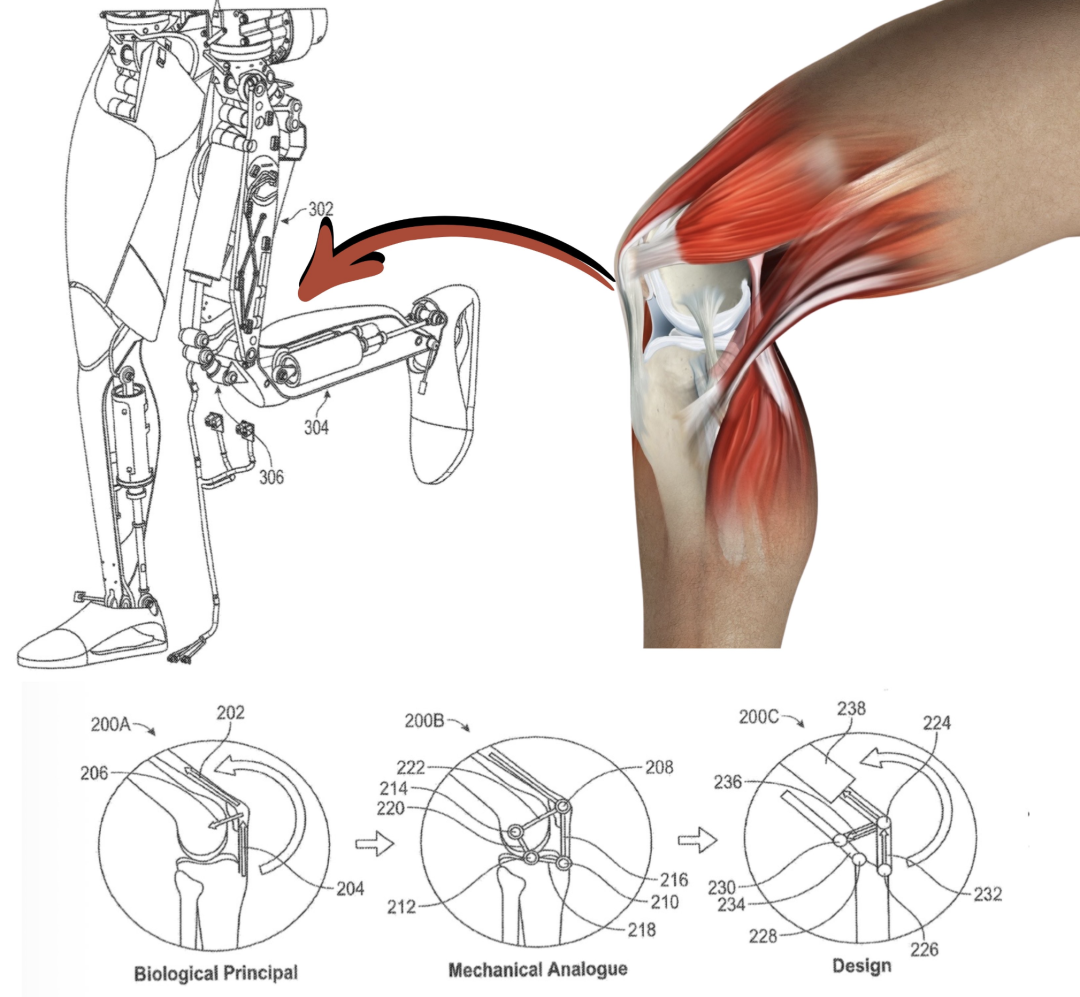
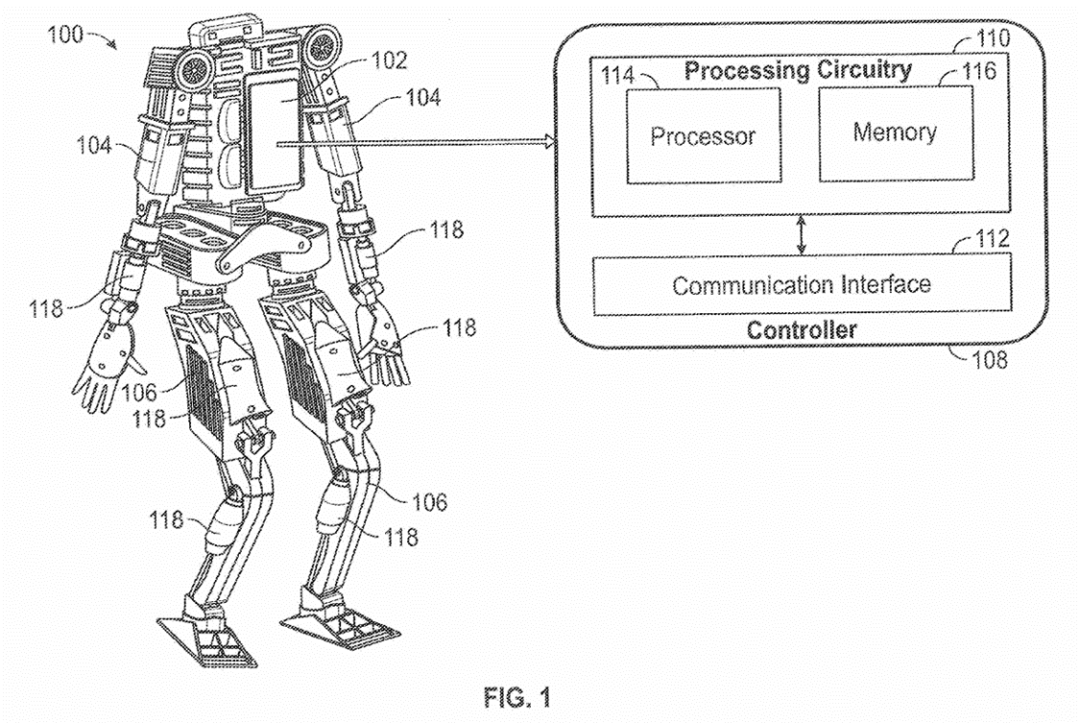
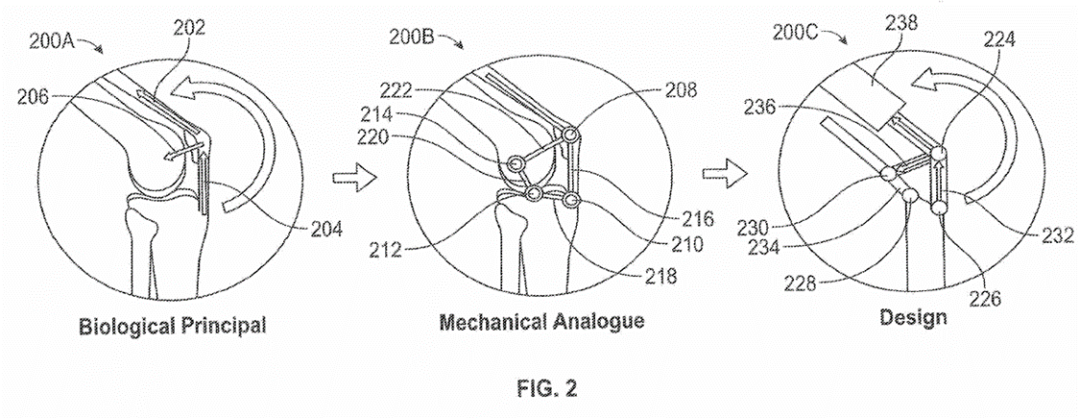
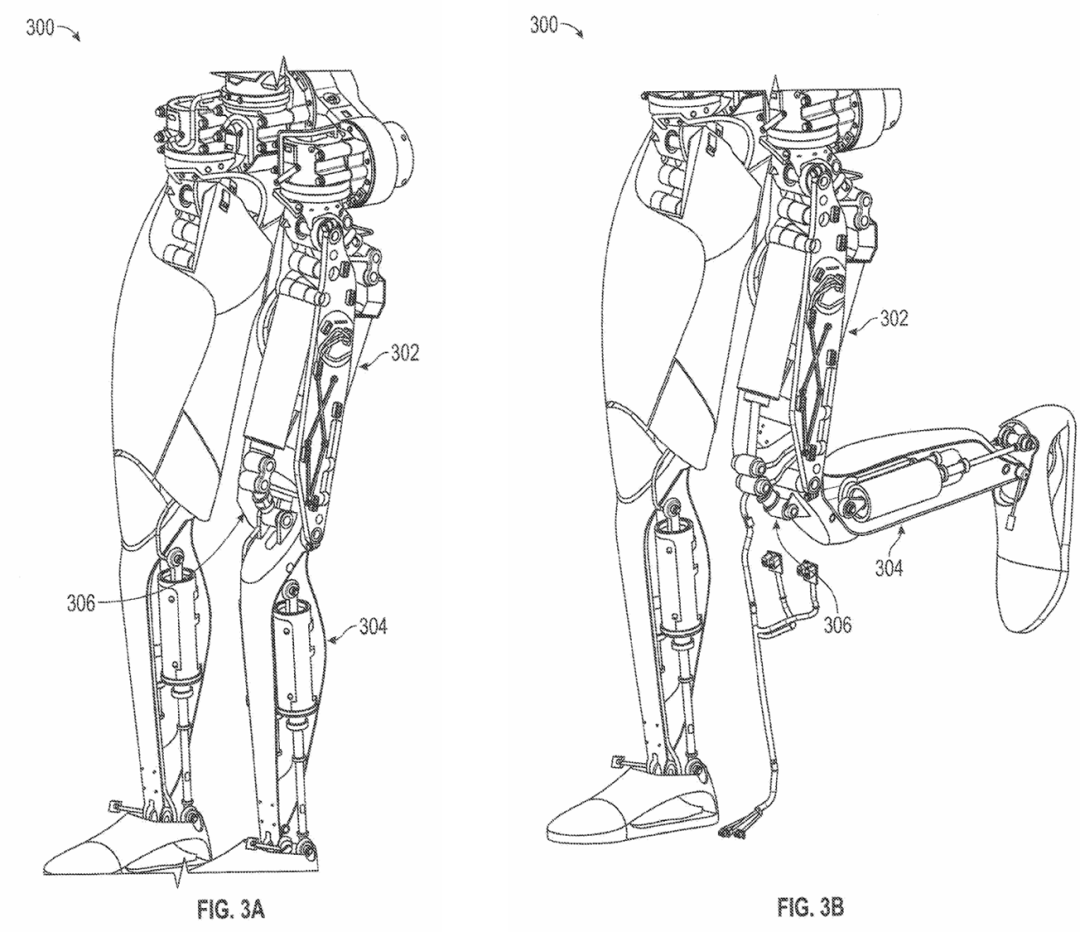
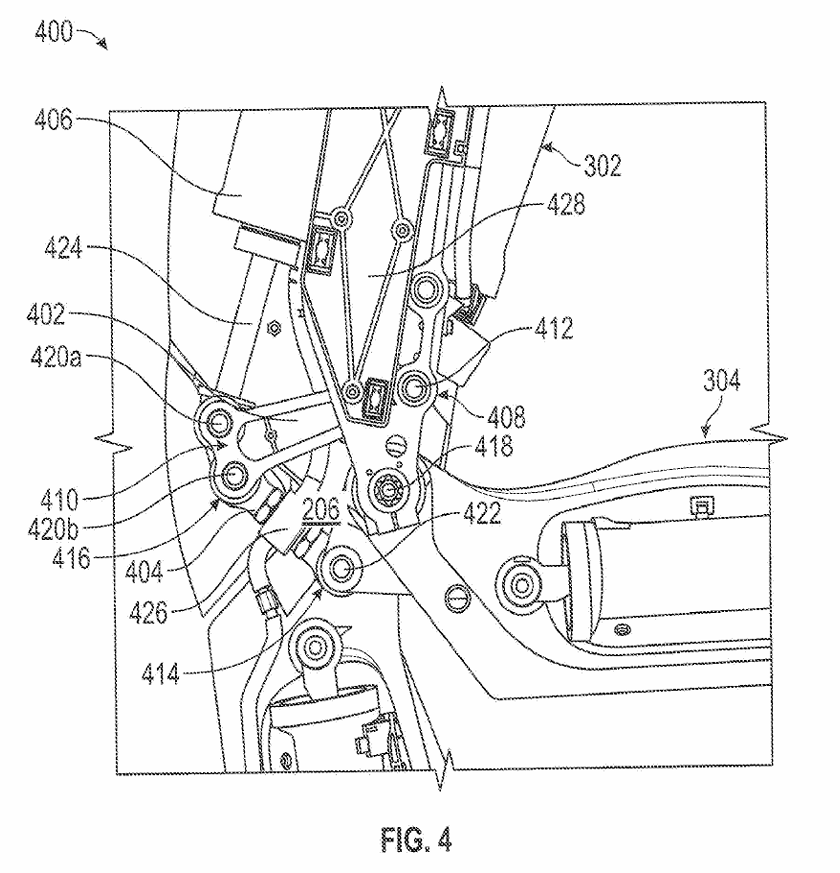
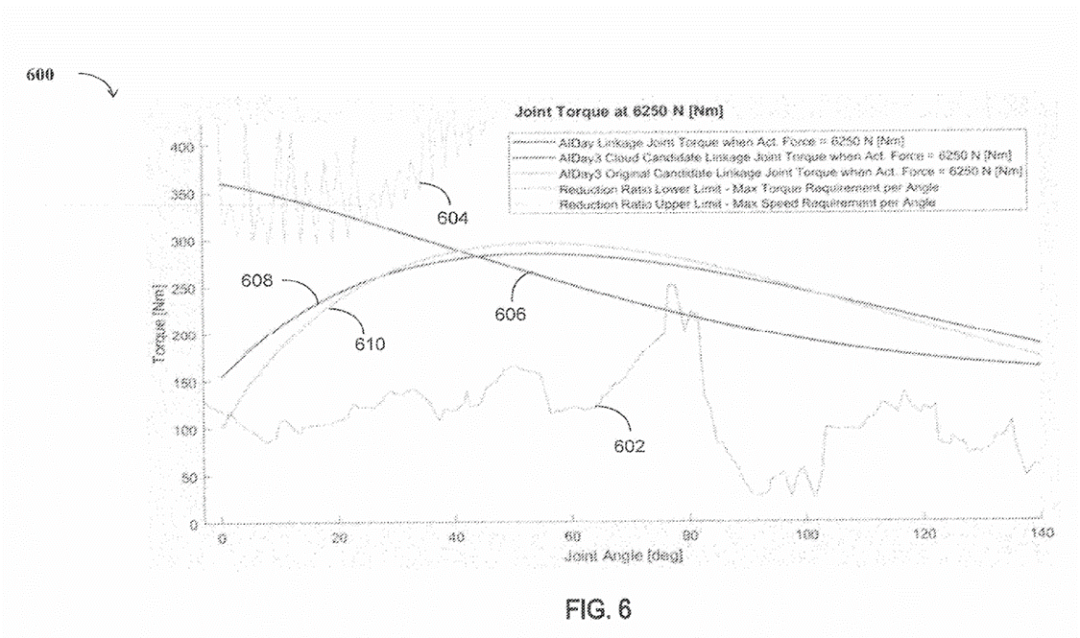
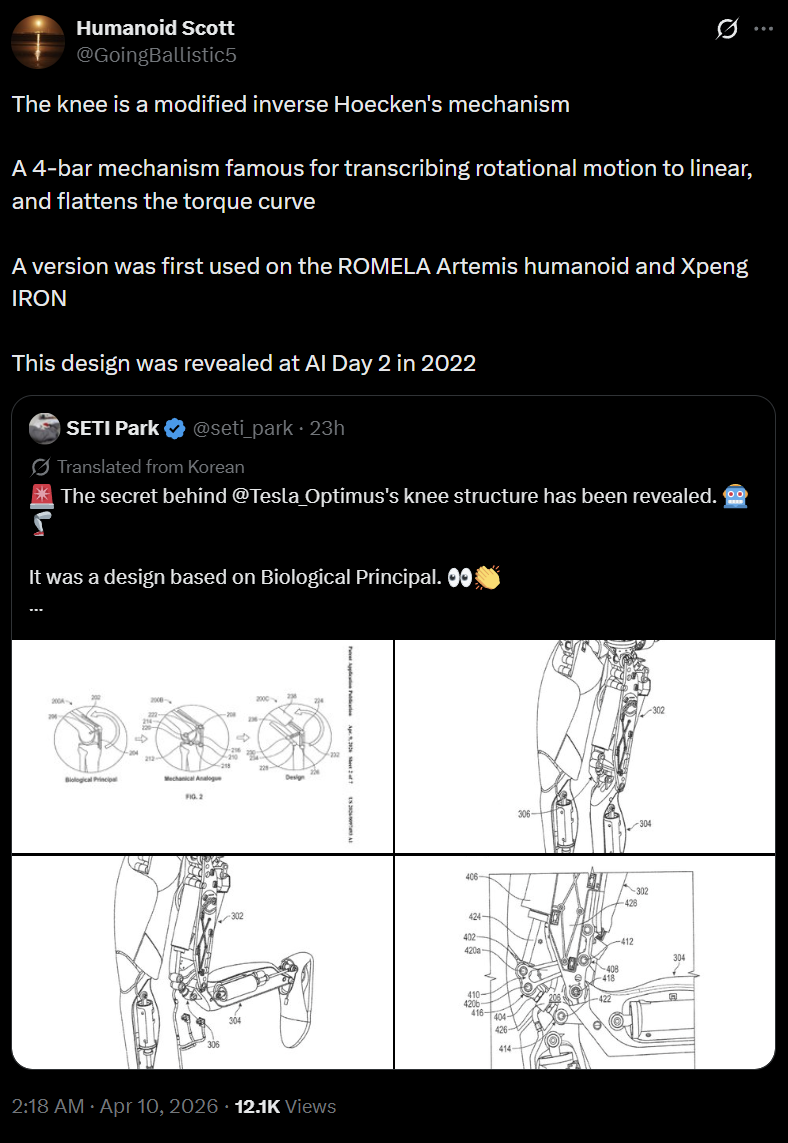
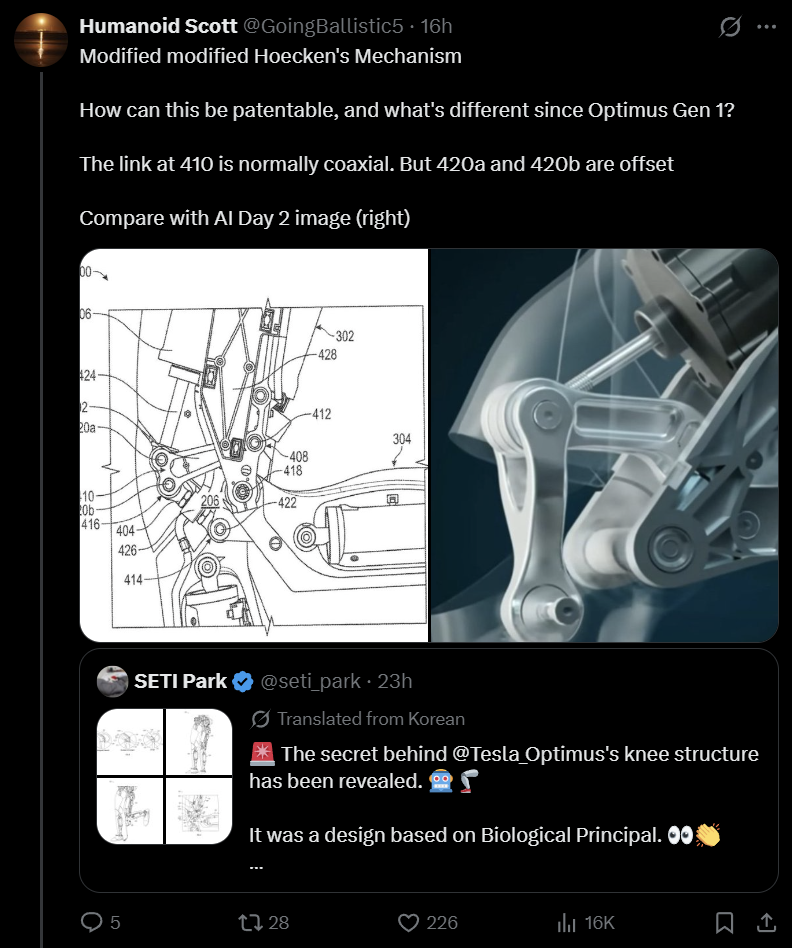
非对称运动角度放大机制:利用非线性的几何连杆映射,驱动器端区区60度的微小旋转输出,能够被瞬间放大为机器人小腿端高达150度乃至接近180度的大范围屈伸动作 。单一直线驱动器的高效复用:整套复杂的下肢多轴运动仅依靠单个集成伺服电机的直线执行器即可完成,从根本上消除了多余电机的重量负担与额外静态功耗 。硬件级闭环与动态扭矩感知:在核心承力连杆中直接内嵌力传感器,配合机器人的瞬时位姿和速度数据,使中央算力能够对执行器的毫米级位移进行高频实时控制 。导向能耗极小化的仿真寻优系统:物理样机定型前引入多维度的计算机仿真评估,在整周期运动轨迹内对比各种连杆长度参数的扭矩消耗曲线,从而锁定能耗最低的最优解。图1:整体机器人平台示意图,不仅标出双腿、双臂和上身,还把控制器、处理器、存储器和通信接口一起画了出来。真正的工程创新往往源自对自然的精确解构与参数化重建。特斯拉首先勾勒了这款人形机器人的宏观控制逻辑。整个计算中枢集成在机器人的躯干内部,包含负责统筹规划的处理电路与通信接口。这种大脑居中结合末端执行器分布式响应的拓扑架构,为膝关节复杂的高频动力学运算提供了坚实的算力底座。不是孤立地谈一个机械膝盖,而是把膝关节视为整机控制体系中的一个可计算、可通信、可执行的子系统。图2:左侧的Biological Principal图,画的是人体膝关节的侧视结构,并用箭头表达膝部主要力的传递方向。中间的Mechanical Analogue把这种生物受力关系压缩成四个点和四条连接关系。右侧的Design才是面向机器人关节的设计表达。这里出现了三个真正的机械连接构件和四个连接点,其中两个连接点布置在小腿结构上。由系统宏观切入局部细节,专利详细展示了从人体膝盖生物学模型向纯机械结构的严密演进过程。人体膝关节的稳定依赖于股四头肌、髌骨韧带以及髌骨对股骨产生的多重交互作用力。研发团队精准剥离了复杂的肌肉软组织,将这些受力点直接抽象为一个纯粹的四节点机械系统。这四个节点分别严格对应生物学中的髌骨位置、韧带与胫骨连接点、股骨与胫骨连接点以及髌骨受力点。最终定型的机器人关节设计严丝合缝地复刻了这一受力网络,内部配置了四个连接点与三个负责传导张力的连杆机构。这种跨界映射绝非生搬硬套的外观模仿,而是对生物力学能量利用效率的深度榨取。从工程角度看,此设计可以获得更大的小腿旋转范围、更小的执行器位移需求,以及更紧凑的布置空间。因为一旦运动目标不是由执行器直接硬拉出来,而是由连杆网络放大和重分配出来,执行器就不必沿着最不利的路径承担全部任务。图3A中,上腿部分标为 302,下腿部分标为304,膝关节总成标为 306。专利展示了双腿外观模型,无论是标准的直立状态还是大角度的屈膝姿态,均直接验证了该仿生机构卓越的运动包络范围。线性执行器沿着上腿内部布置,通过连杆把直线位移转换成屈膝动作。这里最重要的不是动作本身,而是动作过程中执行器没有直接占据膝盖转轴位置。图4:第一连杆 402 的第一端 408 连接上腿部分,并绕第一枢轴 412 相对上腿转动。第二连杆 404 的第一端 414 连接下腿部分,而下腿又能绕第二枢轴 418 相对上腿转动。线性执行器 406 与两根连杆的另一端建立机械耦合,当执行器动作时,一方面让第一连杆绕第一枢轴转动,另一方面通过第二连杆把作用传到下腿,使下腿绕第二枢轴运动。专利展示了褪去工业设计外壳后的硬核组件。大腿与小腿之间悬挂着一套高度集成的膝关节总成。整套机构的动力源头是一个紧凑的直线执行器装置,其内置的伺服电机高速驱动传动轴进行线性平移运动 。传动轴直接推拉第一连杆,迫使第一连杆受力后绕着固定在大腿端的主枢轴产生回转。第一连杆的尾端紧接着铰接自带精密力传感器的第二连杆,最终将动能传递至小腿主轴完成屈伸动作。这套传动链最精妙的底层逻辑在于极其夸张的非对称运动放大能力。直线执行器仅需输出极短的物理位移推动第一连杆转动60度,小腿就能顺势在其从动枢轴上狂飙出150度的巨大扇面轨迹。该设计在极其局促的机体内部空间中硬生生砸出了惊人的机械行程。任何顶尖的机械硬件都需要极度聪明的算法神经相匹配。专利详述了指挥这套关节的底层控制流向。处理电路必须基于当前的行走或跳跃任务实时决策小腿的绝对目标姿态角度。通过内置的高维映射数据矩阵,系统将瞬时反馈角度、运动角速度与目标节点扭矩进行多模态融合计算,极为严苛地输出直线执行器当下所需的精确位移量指令。伺服电机接收到指令后立即分毫不差地执行推拉动作。除此之外,专利揭示了该研发团队在设计图纸阶段所展现的仿真设计。图中呈现了系统为寻找最优连杆解所运行的大量计算机仿真曲线。通过将不同连杆长度候选方案的关节扭矩消耗曲线与速度需求曲线同时投射在坐标轴上进行地毯式交叉比对,工程师能够非常量化地判定出哪一组物理参数在机器人的完整运动周期内消耗的电能最少。图中显示了几个候选设计的关节扭矩与关节角度的关系,其中执行器力固定为 6250 牛顿。两条曲线分别从上方和下方界定了可行区域。这两条曲线源于减速比约束,上方的曲线由关节在每个角度下必须产生的最大扭矩决定,下方的曲线由最大速度决定。在该范围内,三个候选连杆机构产生了三种不同的扭矩曲线,每种曲线对应不同的连杆长度组合。该图展示的是比较本身:多种设计方案,一个可行区域,以及一个功耗最低的方案。另外需要提到的是,该专利明确指出,其目的是使该组件“能够由单个线性致动器驱动,从而在满足扭矩、速度和运动范围要求的同时,最大限度地减少或降低功率消耗,或最大限度地提高或提升效率。”特斯拉公布的Optimus机器人的量产价格为两万至三万美元。如果不大幅降低每个环节的成本,这个价格就无法实现,而人形机器人的关节数量众多。例如,一个膝盖只需要一个驱动器而不是两个,一个小型驱动器而不是大型驱动器,以及一块小型电池而不是大型电池,这些成本节约在百万台机器人的量产中,每台机器人的双腿都需要节省,因此节省的成本相当可观。针对该专利,机器人专家Scott Walter 表示:该膝关节是改良的反向霍肯机构,一种以将旋转运动转换为线性运动并平滑扭矩曲线而闻名的四杆机构。该机构的早期版本曾应用于ROMELA Artemis人形机器人和小鹏IRON机器人。该设计于2022年人工智能日2上发布。同时表示疑问,改进后的霍肯机构。这如何能申请专利?与第一代Optimus相比有何不同?410处的连接通常是同轴的。但420a和420b处的连接是错位的。免责声明
1、我们整理和转载此文出于传播更多资讯之目的,不代表本号观点,亦不构成任何投资观点,由此做出的投资决策与本人本文无关!2、本文所用的视频、图片、文字如涉及作品版权问题,请第一时间联系小编:16620948826(同微信),我们将立即删除,无任何商业用途!
# 扫描上方二维码,添加小编微信 #
# 申请请备注公司+姓名+职位
转载说明:本文系转载内容,版权归原作者及原出处所有。转载目的在于传递更多行业信息,文章观点仅代表原作者本人,与本平台立场无关。若涉及作品版权问题,请原作者或相关权利人及时与本平台联系,我们将在第一时间核实后移除相关内容。
 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库