马斯克Optimus V3又又又延期,问题还是出在灵巧手?
发布时间:2026-04-12来源:人形机器人洞察研究

温馨提示:扫描文末二维码,加入知识星球,免费下载2400+行业报告(包含海外投行报告);商务和研究咨询合作请联系16620948826(同微信)2026年4月,Tesla连续发布2个关于Optimus灵巧手的招聘信息,公开招募“Optimus Hand”硬件子系统负责人(职责涵盖架构设计、原型验证、工业化和量产全流程)和Optimus Hand 系统验证工程师(职责涵盖设计并实施针对机械手的子系统和系统级综合测试。开发创新方法,以确保尖端机械手的可靠性、性能和安全性等)。Tesla Optimus V3原计划于2026年第一季度正式发布,却多次推迟,至今仍未如期亮相。纵观马斯克对于人形机器人的讨论历史,灵巧手(dexterous hand)反复被提及为最大技术瓶颈之一。马斯克多次强调,人形机器人真正的“硬核”难题并非行走或AI感知,而是那双看似简单的“手”——它需要接近人类27-28个自由度(DoF)的复杂性,却必须从零设计全部执行器、电机、齿轮箱和传感器。Optimus项目从2021年首次亮相至今,已历经多次硬件迭代,但手部始终是拖累进度的“最后一道关卡”。2025年10月,Tesla甚至因手部和手臂设计问题暂停量产,测试中手部寿命仅6周;2026年Q1发布计划再度落空,而4月的招聘帖更像是对“手部难题”迟迟未彻底解决的间接证实。Tesla Optimus灵巧手的进化并非一蹴而就,从早期简单夹持器到Gen 3接近人类形态的22 DoF设计,每一次迭代都暴露出手部工程的极端复杂性。2021-2022年:初代基础阶段(Gen 1)。Optimus首次亮相时,手部设计较为基础,主要用于简单抓取,自由度有限,缺乏精细触觉反馈。当时Musk已隐约指出,人形机器人三大核心难题是“真实世界AI、手部工程和规模化制造”,其中手部被视为“最被低估的挑战”。早期原型主要验证移动性和基本任务,手部尚未成为焦点。2023年12月:Gen 2突破——11 DoF与触觉感知。Gen 2原型发布,手部升级至11个自由度,并集成触觉传感器,能完成“握蛋不碎”等精细演示,行走速度提升30%,重量减轻10kg。这标志着Tesla开始从“能动”向“能用”迈进。但马斯克在后续访谈中坦言,手部仍是最大痛点:“人类手部进化出的复杂肌腱网络(大部分肌肉在前臂)极难复制,没有现成供应链。”2024-2025年:迭代受阻,Musk多次公开承认“手部是多数工程难度”。2025年2月,马斯克在X发帖称:“Optimus手部之复杂,让Fabergé蛋都显得简单,它让我对人类手部的精妙有了全新敬畏。” 同年9-10月,问题集中爆发:测试中手部柔性电子皮肤寿命不足6周,机械臂与手部设计存在持久缺陷,导致Tesla暂停量产。马斯克在财报电话会确认,Gen 3最终设计推迟至2026年Q1,并直言:“手部和前臂是整个机器人工程难度的绝大部分,比Cybertruck或Model X都难,接近Starship级别。” 埃隆·马斯克谈Optimus机器人为何如此难以打造(硬件方面):“手部是整个机器人工程难度最大的部分。”人类的手部进化出了惊人的复杂性——约27-28个自由度,复杂的肌腱网络(主要集中在前臂肌肉),以及超凡的灵巧性。目前尚无现成的供应链。特斯拉必须从物理学的基本原理出发,设计每一个执行器、电机、变速箱和电子元件。“比Cybertruck或Model X更难……介于Model X和Starship之间。”Optimus v3最终目标是实现真正达到人类手部性能水平。“手部难题”被严重低估了。
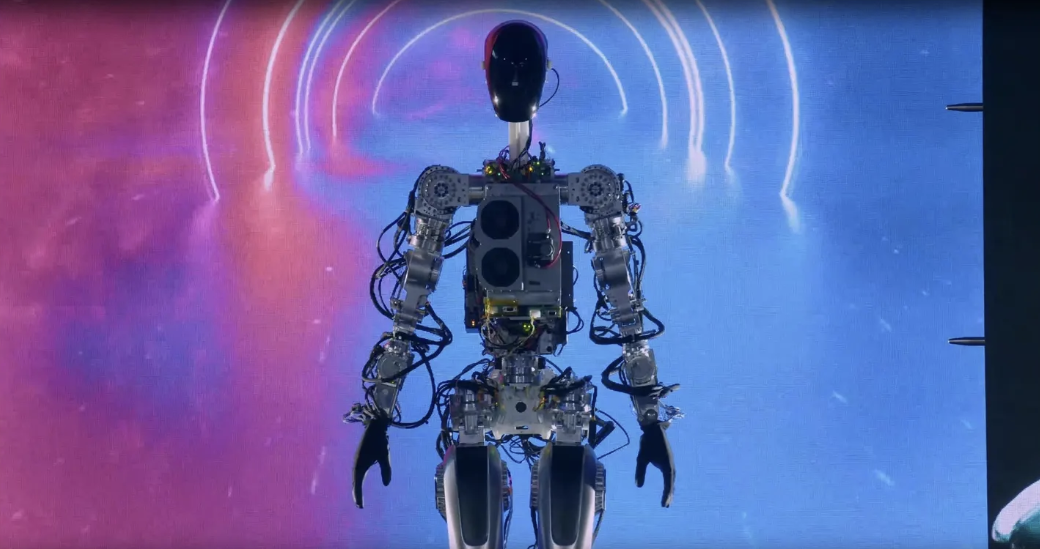
马斯克此时表示,这个机器人有手了。马斯克在多个访谈中反复强调三大瓶颈:1) 手部灵巧性;2) 真实世界AI;3) 高量产能力。他指出,其他公司演示机器人鲜有真正具备人类全部自由度的优秀手部,而Optimus已实现,但“从物理第一原理设计所有执行器、电机、齿轮和传感器”耗时极长。埃隆·马斯克揭示了人形机器人面临的三大挑战以及特斯拉如何解决这些挑战。人形机器人真正面临的难题只有三个:现实世界的智能;手部结构;规模化生产“我还没见过哪个演示机器人的手部结构能像人手一样灵活自如。但Optimus做到了。”为了达到人类水平的灵巧度,特斯拉必须从物理学的基本原理出发,设计定制的执行器、电机、齿轮、电力电子设备、控制器和传感器。目前还没有现成的供应链可以满足这些需求。“从机电角度来看,手部结构的难度超过了其他所有部件的总和。人手的结构非常复杂。”这就是为什么Optimus能够达到完全不同的水平。特斯拉正在从零开始解决这些最棘手的问题。
2026年:Gen 3手部接近人类形态,却仍未彻底“过关”。2026年2月,Gen 3手部细节曝光:手指22 DoF(较Gen 2翻倍),前臂与手部共约50个执行器,比例和结构更接近人类。马斯克称“这可能是目前最先进的手部”,中国团队3月也发布人类形态手部预告图,暗示灵巧性已接近“超级英雄外套下的真人”。有业内人士表示,如果这张图片反映的是新一代擎天柱的手部设计,则可能表明特斯拉正在继续改进其人形机器人最关键的部件之一。与此同时,特斯拉发布了新视频,最令人印象深刻的部分是下一代Optimus V3机械手。特斯拉工程师指出,他们正在逐步接近人类的外形和功能,这正是人形机器人的“圣杯”。该公司设计的Optimus Gen 3每只手拥有22个自由度。一位工程师表示,随着他们迈向量产,“它看起来甚至不像个机器人。它看起来就像一个穿着超级英雄战衣的人。这将是一项革命性的发明。”然而,4月6日的招聘信息显示,手部子系统的架构、验证与量产仍需专人牵头。这直接印证了V3发布多次延期:原定Q1 2026亮相的“最终亮相”尚未完成,可能手部耐用性、热管理和精密控制仍需优化。马斯克认为:手部不是“配件”,而是“整个机器人最难的部分”。人类手部约27-28 DoF,肌腱主要位于前臂,通过复杂缆线系统实现精细力控、触觉和多功能(从握锤到绣花)。机器人需同时满足强度、精度、耐用性和低功耗,却无任何成熟供应链。Tesla必须从零发明执行器、传感器和控制系统,这比车辆或火箭的单一部件复杂得多。 其他公司演示往往依赖远程操作或简化任务,而Optimus追求“通用目的”——必须在真实世界独立完成任意家务或工厂操作。手部问题还牵动AI:视觉+触觉反馈的实时控制、力反馈补偿不确定性,这些都需要硬件与软件深度融合。马斯克总结:“手部从机电角度比其他一切加起来都难。” 正因如此,Optimus V3的多次延期,可能并非AI或腿部问题,而是手部“最后一公里”的反复打磨。招聘帖的出现,进一步说明量产前的手部工业化仍是尚未完成的重要一环。从Gen 1到Gen 3,Optimus灵巧手的进化见证了Tesla在机器人领域的硬核投入,但也反复证明:人形机器人的成败,最终落在那双手上。马斯克的Optimus V3能否在2026年下半年真正量产,仍需观察手部耐用性和供应链成熟度。若手部瓶颈彻底突破,Optimus将从“演示机器人”跃升为改变人类劳动格局的通用劳动力。正如马斯克所言,解决手部问题后,“它将成为有史以来最大的产品”。免责声明
1、我们整理和转载此文出于传播更多资讯之目的,不代表本号观点,亦不构成任何投资观点,由此做出的投资决策与本人本文无关!2、本文所用的视频、图片、文字如涉及作品版权问题,请第一时间联系小编:16620948826(同微信),我们将立即删除,无任何商业用途!
# 扫描上方二维码,添加小编微信 #
# 申请请备注公司+姓名+职位
转载说明:本文系转载内容,版权归原作者及原出处所有。转载目的在于传递更多行业信息,文章观点仅代表原作者本人,与本平台立场无关。若涉及作品版权问题,请原作者或相关权利人及时与本平台联系,我们将在第一时间核实后移除相关内容。
 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库