 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库国防科大造了个纸片机器人,登上Nature子刊

机器人前瞻(公众号:robot_pro)
作者|葛文婷
编辑|漠影
机器人前瞻3月24日报道,近日,国防科技大学团队在
Nature
子刊
Microsystems & Nanoengineering
上发表了一项关于
PLioBot
微型机器人的研究成果。
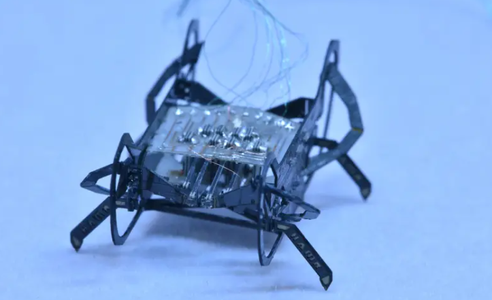
这款新型平行腿昆虫级折纸机器人PLioBot,
体量仅1.2克
(
约等于一枚回形针的重量)。它采用
集成折纸机制
,将所有致动器与结构融为一体,可通过改进的层压工艺轻松制造,无需繁琐组装。
它
能钻进极窄的缝隙
,攀爬
12°
的斜坡,扛起
1.4克
的额外负载;在隧道、L形弯道、沙地草地石头路面等
复杂地形中灵活穿行
;
甚至能在鱼缸底部“潜水”
,
在水面上游泳
这些能力让它
有望在灾害救援中探寻被困人员位置,或深入封闭环境执行勘探任务。
此外,它能以
每秒60次
的频率达到
最大44.6厘米/秒
的速度,并可以在运动中丝滑调整姿态,包括向前、向后和旋转等,这
相当于一秒冲出近18倍身长的距离
。
对行业而言,PLioBot展示的
集成折纸机制与增强层压工艺
,为昆虫级微型机器人的设计和无组装制造提供了一条新思路。

论文链接:
一、PLioBot首创驱动+结构一体化折纸设计,为厘米级昆虫机器人量产开辟新路径
厘米级、轻量化的微型机器人,可大规模部署、低成本使用,在灾后搜救、工业检测、密闭空间探查等场景极具价值。但传统微型机器人普遍存在组装复杂、结构与驱动分离、环境适应性弱等问题,难以真正落地。
而PLioBot 的出现,正是为了解决这些痛点,它具备
三大核心特征
:
驱动与结构一体化,具备无需组装、可复制性强的全集成折纸结构;
速度快、转向灵、越障稳的运动能力;
拥有适应草地、斜坡、沙石、水下等多个应用场景的高环境适应性和全地形适应能力。

PLioBot所表现出的创新性,也为微型机器人行业的
制造工艺
、
结构设计
、
建模优化
三方面提供了新思路:
01、对微型机器人的制造工艺来说
PLioBot
长宽为2.5cm,高2.7cm
, 由
机器人本体
、
4 个组合压电致动器
、
4 组平行腿机
构
组成。
它的四条平行腿就像昆虫的高效步足,依靠压电材料快速振动驱动,实现稳定爬行与灵活转向。
为了适应水陆不同环境,团队还为它设计了两种 “鞋子”,分别为抓地更强,适合陆地、斜坡、粗糙路面的
半球形脚垫
和适合水面游泳、水底潜行的
鳍状脚蹼
。
这使得PLioBot机器人不管是在干燥的陆地上还是潮湿的水下,都能完成勘探任务。
此外,该团队还设计了
一体化折纸 + 层压工艺
,让结构和驱动一次成型。
这种制造工艺可大幅降低制造难度,有效解决传统微型机器人需要大量手工组装,效率低、一致性差等痛点,为昆虫级机器人量产开辟新路。
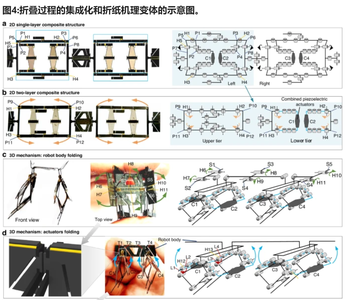
02、对结构设计来说
普通机器人像拼模型,要把驱动(电机)、机身、腿这些零件一个个造出来,再手工组装起来。
而PLioBot换了个思路。它
把机器人的机身、腿、驱动、铰链等所有部件都打包进一套集成折纸结构的薄片图纸里
,使用者
可以像折千纸鹤一样,沿着预设折痕折叠
,
便能让一个二维薄片
直接折成完整的三维可动机器人
,全程不用额外拼接。
折叠之后,驱动本身就成了结构,结构本身也自带驱动,它们不再需要分开造、分开装。
这种设计不仅省去了复杂的手工组装,让零件数量大幅减少,还能让装配误差几乎为零,稳定性更高。其柔性铰链部位经过专门优化,既柔软可折,又坚固耐用,可保证机器人反复运动也不易损坏,在微小的尺寸下还能跑得很快、很灵活。
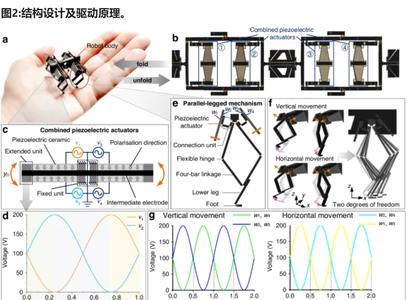
▲PLioBot的结构设计及驱动原理
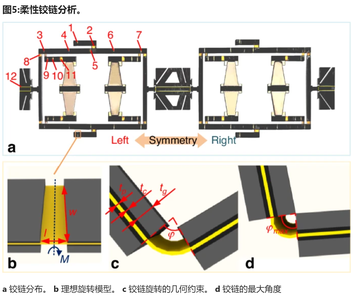
▲PLioBot的柔性铰链
03、在建模与优化层面
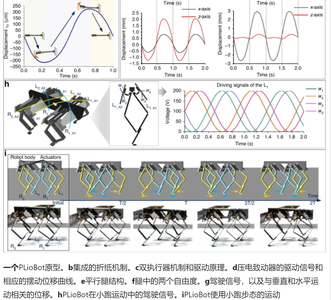
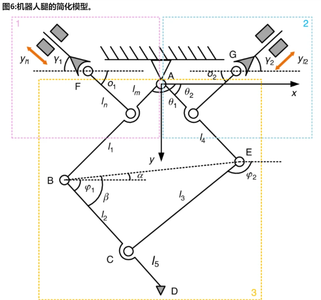
团队对平行腿机构做了精细的运动学分析,像给机器人做步态体检一样,模拟每一次抬腿、迈步、落地的姿态,找到最省力、最稳定、最快的运动模式。
通过不断优化腿长、角度、铰链位置、驱动频率,让 PLioBot 在小体积、轻重量的前提下,实现速度、负载、越障能力三者兼顾,最终达到
每秒 44 厘米
的顶尖水平。

二、PLioBot由多种关键材料构成
PLioBot 由
玻璃纤维
、
碳纤维预浸料
、
聚酰亚胺(PI)膜
、
压电陶瓷
四种
关键材料共同构成。
这些材料各司其职。例如,玻璃纤维用于增强机械结构的刚性;碳纤维预浸料作为粘合材料,增强机器人链条的刚度等。
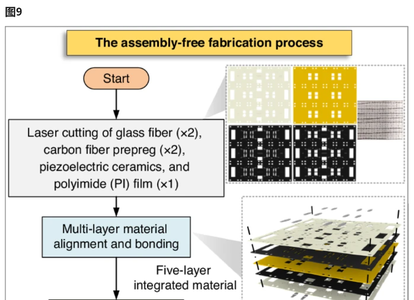
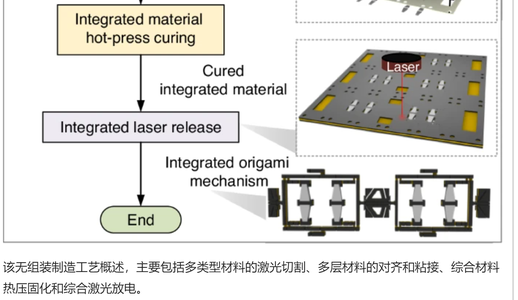
无装配的制造工艺过程可以分为三个不同的步骤:
多材料激光加工
、
集成层压和固化
,以及
集成激光释放
。
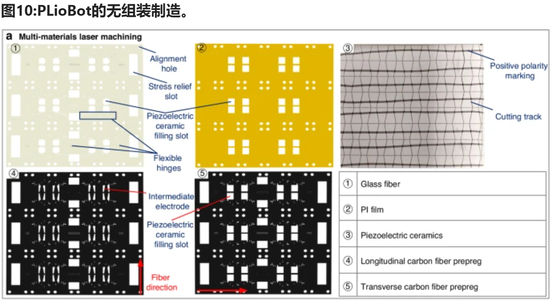
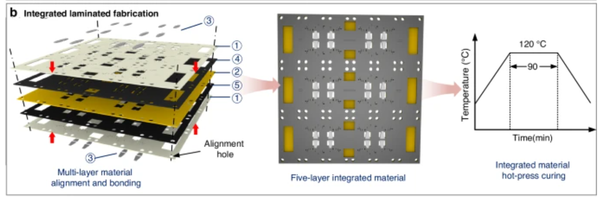
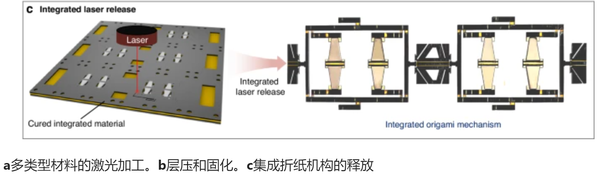
制造过程采用改进层压工艺,把多层材料一次性贴合、成型,再通过折纸变成机器人,真正实现无组装制造。
研究显示,只要电池与电路总重控制在0.8 克以内,它就可以跑得又快又稳。
三、与美国HAMR和CLARI同台比拼,优势明显
目前全球最具代表性的昆虫级机器人,主要是美国的
HAMR
和
CLARI
。
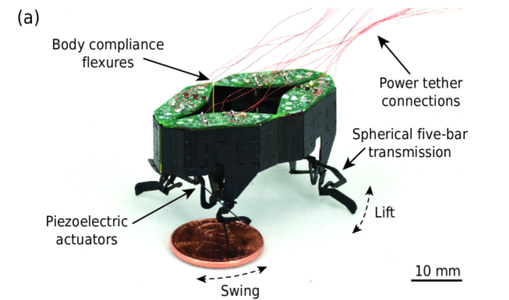
▲哈佛大学团队打造的四足小强机器人HAMR
HAMR
是由哈佛大学团队打造的四足小强机器人。它仿照蟑螂设计,但重量只有蟑螂的十分之一。它重仅约0.3克、长2.25厘米,
最大速度可以达到44.2厘米/秒(10.1 BL/秒)
,步频最高可达到200Hz。
▲微型变形机器人CLARI
CLARI
是美国科罗拉多大学博尔德分校工程师团队打造的微型变形机器人,外形似蜘蛛,当周围环境变得狭窄时,CLARI可以从正方形(34毫米宽)压成细长形(21毫米宽),以便通过狭窄的间隙。
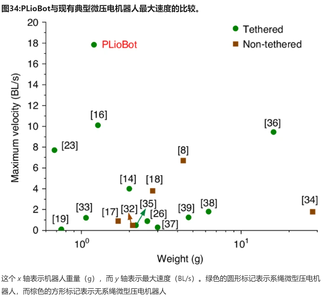
PLioBot 与这些现有的典型压电微机器人相比优势明显,主要体现在
速度
、
环境适应性
和
结构设计
三点:
第一,PLioBot速度更快。
PLioBot实现了更高的最大速度为17.84 BL/s,是HAMR 16 的1.77倍,CLARI 的 20 倍。
第二,PLioBot环境适应性更强。
大多数现有的微压电机器人无法在复杂、非结构化环境中运行。而PLioBot却可以在多种类型的环境中显示出显著的优势,包括但不限于能在沙质环境中移动而不会下沉、能在携带 1.4 g 有效载荷的情况下通过L形弯道等。
第三,PLioBot结构设计和工程经验富有创新性。
PLioBot的集成折纸机构设计和无装配制造过程可以为其他微型机器人的开发提供有价值的结构设计和工程经验。
结语:微型机器人迈入无组装新时代
PLioBot 可以以 1.2 克的极致体重,完成爬坡、越障、潜行、高速奔跑等一系列高难度动作。
它的问世为灾害搜救、密闭空间勘探、工业内窥检测等场景提供了全新解决方案。
国防科大团队表示,PLioBot机器人
验证了一体化折纸 + 层压工艺的可行性
,它的集成折纸机构设计和无装配制造过程,未来可直接复用到更多微型机器人上,推动整个领域快速发展。
然而,由于外部电源的限制,PLiOBot目前的实现还需依赖于有线连接,
这在一定程度上限制了PLiOBot的实际适用性。未来,团队需要把工作重点集中于微尺度高压集成电路的开发及其与机器人的集成上,努力实现机器人的无线自主作业,
让PLioBot真正摆脱线缆束缚,走向真实战场与救援现场。





