【技术拆解】20主动自由度的腱绳驱动灵巧手
发布时间:2026-04-14来源:人形机器人洞察研究

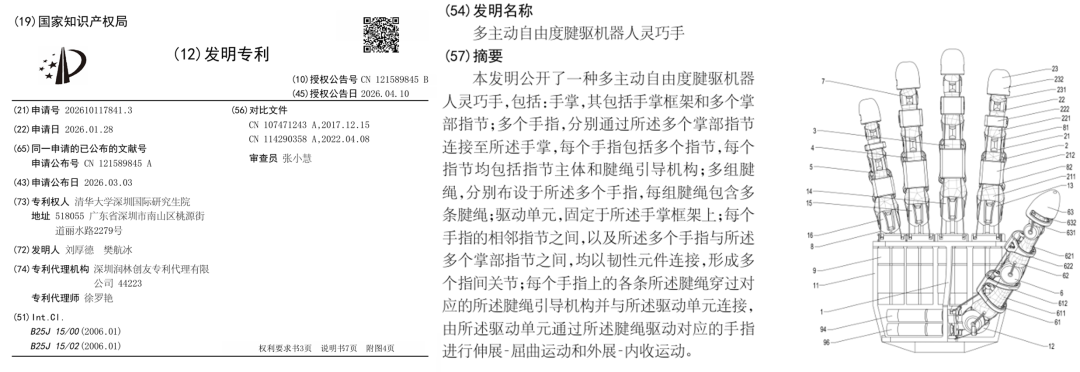
温馨提示:扫描文末二维码,加入知识星球,免费下载2400+行业报告(包含海外投行报告);商务和研究咨询合作请联系16620948826(同微信)在人形机器人向通用化迈进的过程中,末端执行器的设计始终处于矛盾的旋涡中心。传统的刚性连杆驱动虽然控制精准,但在面对非结构化环境的冲击时极易受损,且难以兼顾人手的灵活性与极高空间利用率带来的紧凑性。近期,由清华大学深圳国际研究生院团队授权的专利CN 121589845 B展示了一种极具前瞻性的平衡方案。该发明摒弃了死板的机械铰链,转而利用韧带连接与多主动自由度腱驱技术,构建出一套具备高灵活性、强柔顺性且物理尺寸贴合人手的刚柔耦合灵巧手系统。核心要点
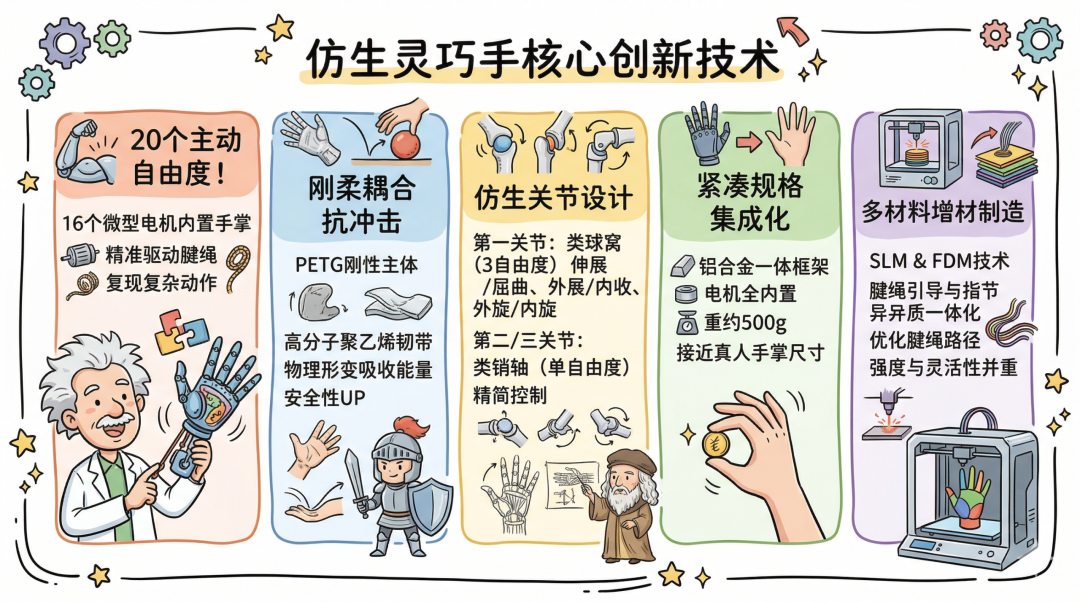
多达20个主动自由度的超高灵活性:通过内置于手掌框架的16个微型电机精准驱动多组腱绳,整手模拟了人手的25个自由度,不仅能完成基础抓取,更具备复现人类复杂操作动作的能力。
刚柔耦合结构的抗冲击韧性:系统将PETG材料的刚性指节主体与高分子聚乙烯、热塑性聚氨酯等柔性韧带及弹性腱绳相结合,这种设计允许手指在受到意外碰撞时通过物理形变吸收能量,显著提升了机器人的环境适应性与安全性。
指间关节的仿生运动学设计:第一指间关节采用了类球窝式结构,实现了包含伸展-屈曲、外展-内收及外旋-内旋的三自由度运动;而第二、三指间关节则采用类销轴式结构专注于单一自由度,这种层级化配置在保证灵活性的同时精简了控制复杂度。
高度集成化的紧凑物理规格:驱动电机全部内置于铝合金一体成型的手掌框架内,整手重量控制在500克左右,长度与宽度均接近真人手掌尺寸,成功解决了腱驱机器人普遍存在的体积臃肿问题。
多材料增材制造的一体化成型:利用选择性激光熔化(SLM)与多材料熔融沉积(FDM)技术,实现了复杂腱绳引导机构与指节主体的异质材料一体化制造,在保证结构强度的前提下,极大地优化了内部的腱绳布设路径。
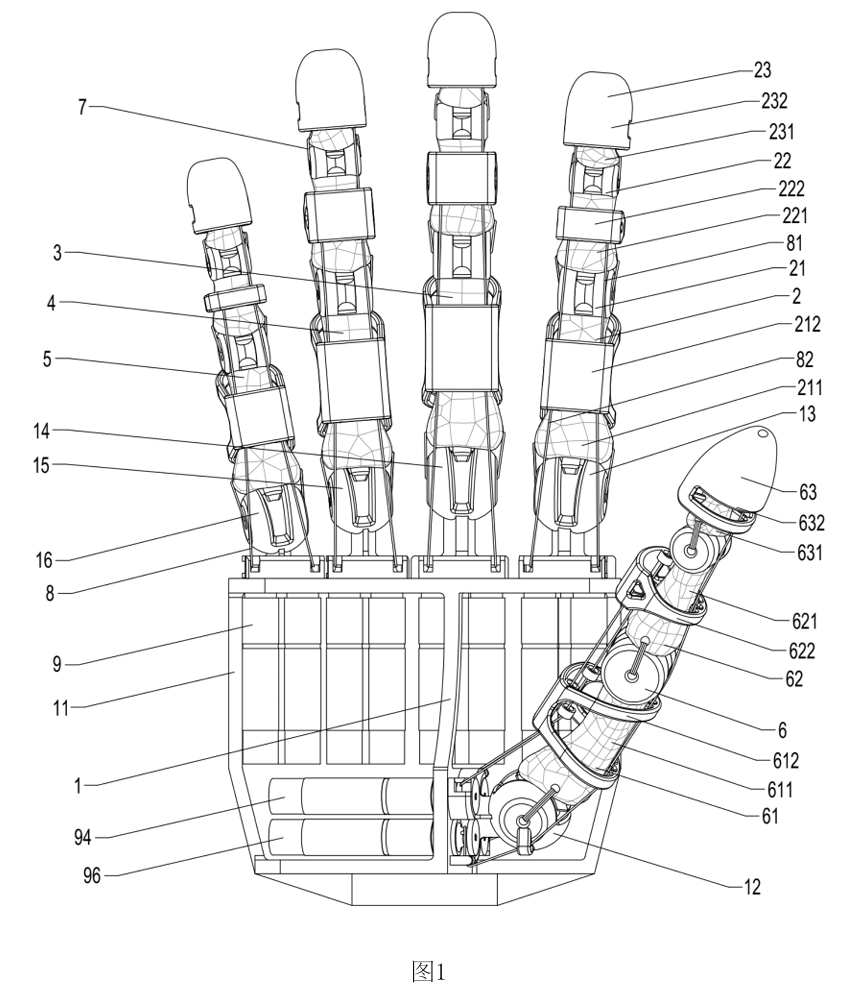
现有技术的局限与突破口。长期以来,机器人灵巧手领域存在着灵活性、柔顺性与紧凑性无法兼顾的“三难困境”。外置电机的腱驱手虽然灵活但系统冗余度极高,通用性差;而内置电机的连杆手虽然结构紧凑,却往往因为刚性过强而缺乏自适应能力。本发明通过将“韧带连接”引入指间关节,利用韧性元件的被动适应特性与腱绳的主动拉力形成配合,从底层物理结构上化解了这一矛盾。图1展示了灵巧手的整体结构主视图。可以观察到手掌框架11与五个手指的分布,拇指6通过第一掌部指节12连接,其余四指分别通过对应的掌部指节13至16连接。图中清晰标注了驱动单元9及其内置的电机94、96,这些电机被紧凑地安置在手掌内部,这是实现高紧凑性的物理基础。将驱动单元9完全锁定在手掌框架11内,实现了“自驱动”的模块化设计:
16电机阵列:拇指分配了4个驱动电机(驱动腱绳84-87),其余四指各分配3个电机 。这些电机通过分布在掌部指节(12-16)上的换向柱进行力矩转接。
空间换能:利用铝合金SLM一体成型技术,手掌框架内部被加工出复杂的支撑结构,用于固定电机。这种设计使得整手重量仅约500克,厚度与宽度均与真人手掌无异,解决了电机外置导致的系统臃肿问题。
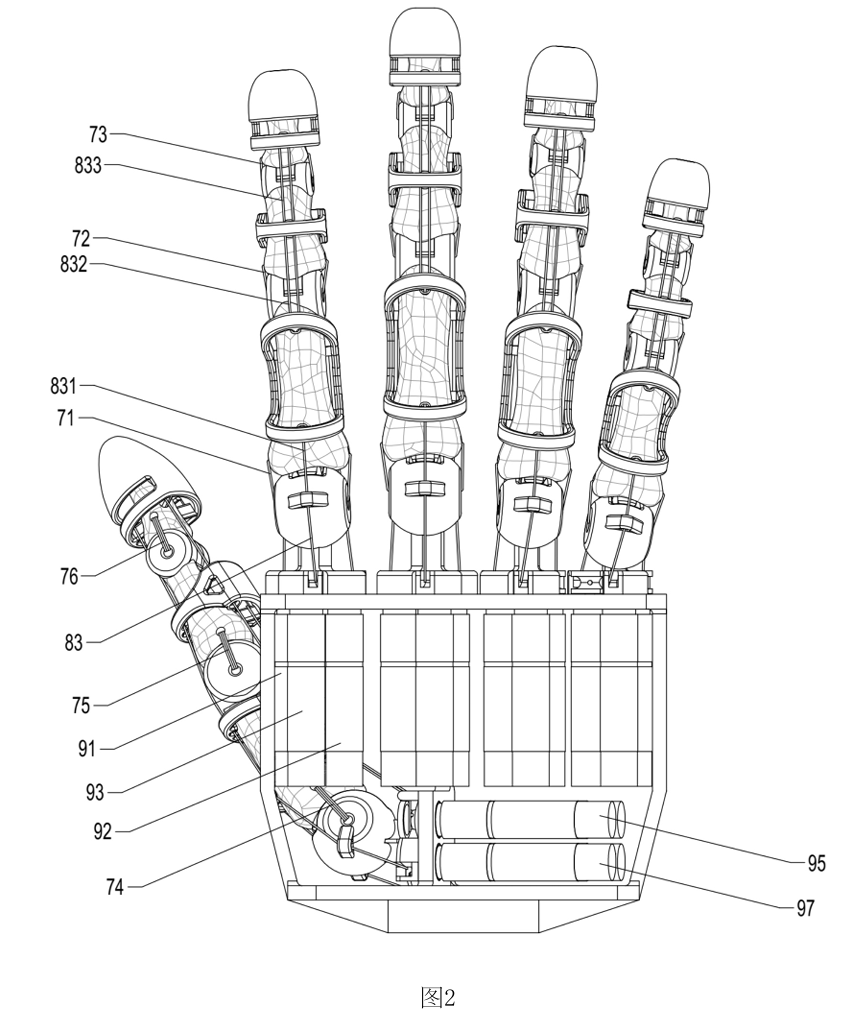
腱绳布设与运动逻辑。专利详细描述了极为复杂的腱绳传动路径。以食指为例,它配置了三条关键腱绳:桡侧指屈腱绳81、尺侧指屈腱绳82以及由非弹性主体与弹性线构成的指伸腱绳83。结合图2的后视图可以发现,指屈腱绳81与82的尾端分别固定在不同指节的连接柱上,这种错位固定策略允许电机通过不同拉力组合来独立控制各个指节的屈曲运动。更具创新性的是指伸腱绳83的设计,其非弹性主体831主要负责第一指间关节的伸展,而位于背侧的第一弹性部分832和第二弹性部分833则利用弹性回弹力实现了第二和第三指间关节的自适应伸展。这种主动驱动与被动回弹相结合的方式,在保证自由度的同时大幅减少了所需的电机数量。为了在有限的手掌空间内布设数十条腱绳,详细规定了导向与换向机制:
差异化固定点:对于食指,桡侧指屈腱绳81尾端固定在第二指节,而尺侧指屈腱绳82尾端则延伸固定至第三指节。这意味着通过控制这两条腱绳的行程差,系统可以精准控制手指的弯曲曲率。
对称反转设计:有趣的是,中指、无名指和小指的固定点与食指完全相反——它们的桡侧指屈腱绳固定在第三指节,尺侧固定在第二指节。这种对称设计是为了平衡手掌内部电机的排布空间,防止腱绳在密集的电机群中发生干涉。
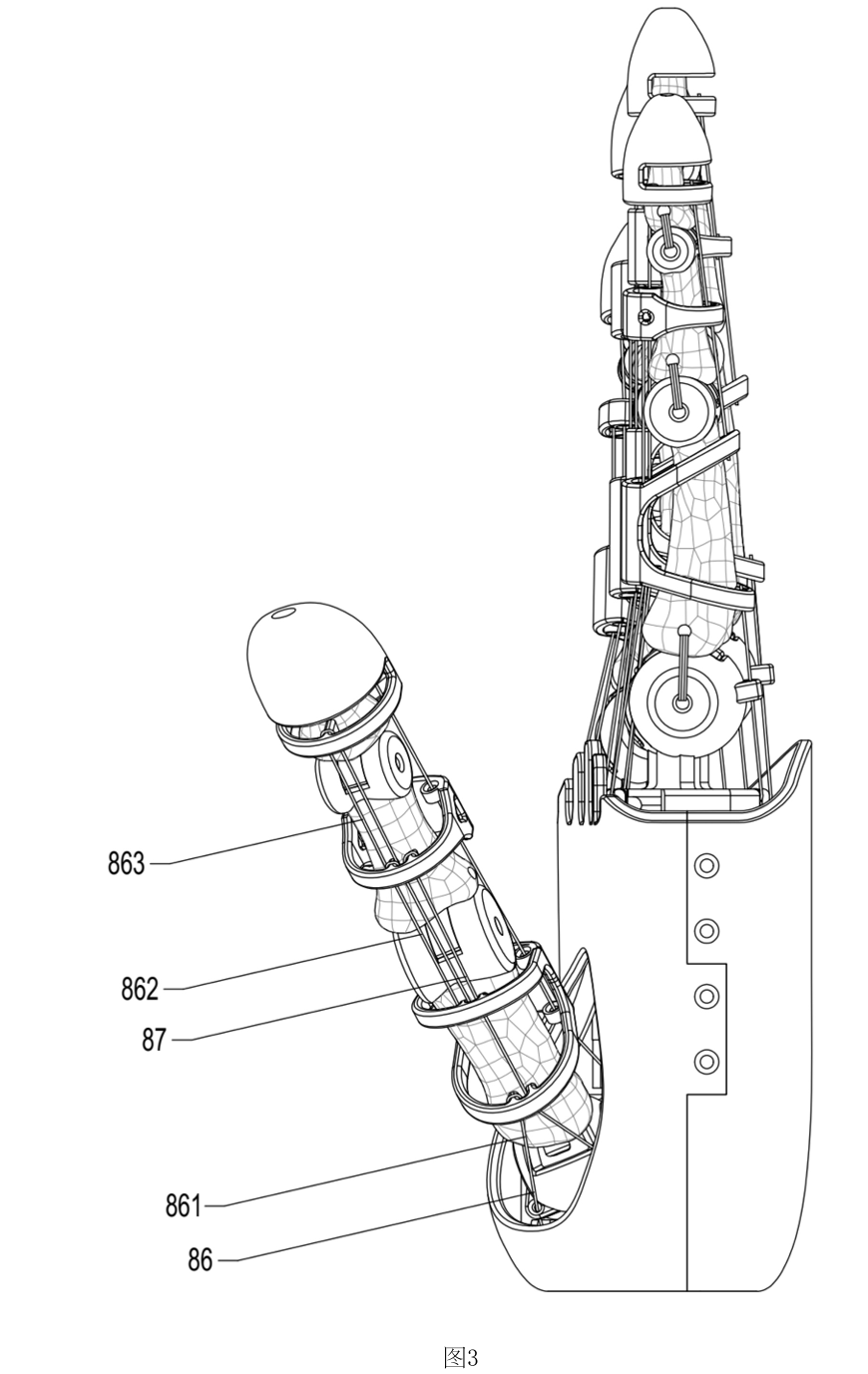
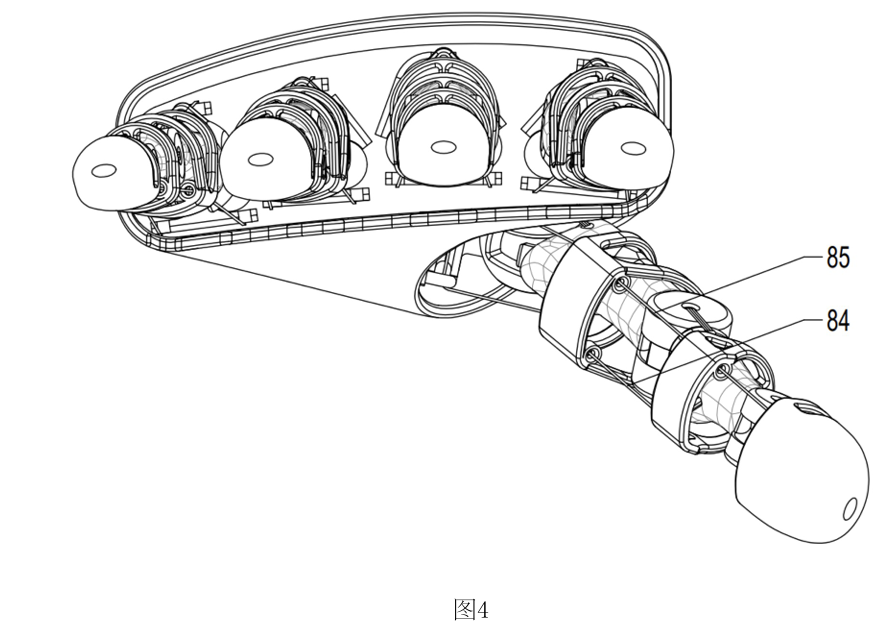
拇指关节的特殊强化。拇指作为手部功能的核心,其腱驱设计更为复杂。对应于拇指6的腱绳组包含四条:桡侧指屈腱绳84、尺侧指屈腱绳85、桡侧指伸腱绳86以及尺侧指伸腱绳87。从图3侧视图中可以看到,拇指的指间关节同样被多条韧带约束,形成了稳定的类球窝关节。拇指的非弹性主体部分861不仅负责伸展,还兼顾了外展动作的驱动。这种多功能腱绳的设计方案,使得拇指能够通过仅有的四个电机实现包含屈曲、伸展、外展、内收在内的五个自由度,精准模拟人类拇指的对掌等精细动作。制造工艺与集成效率。该发明对空间效率的追求延伸到了制造层面。手掌部分采用铝合金材料,确保了整体的刚性支撑与散热性能。图4俯视图直观呈现了指节主体与腱绳引导机构的一体化设计效果。腱绳引导机构采用柔性的TPU材料,通过多材料FDM技术直接打印在PETG指节主体上。指节主体采用PETG以保证承载刚性,而腱绳引导机构(如导向孔、换向柱)则采用具有自润滑和柔韧特性的TPU材料。
同时通过多材料FDM技术,两种材料在打印过程中直接融合。这种工艺消除了传统机械组装的间隙,使得腱绳在穿过复杂的导向路径时摩擦阻力最小,响应频率更高。
这种一体化成型不仅减少了装配误差,更重要的是,它能在极小的空间内为腱绳开辟出平滑的换向与导向路径,使得整手长度控制在190毫米以内,真正实现了类人尺寸下的高能输出。该专利通过对刚性骨架与柔性驱动系统的深度重构,为未来人形机器人在精细操作与人机协作领域的落地提供了可靠的技术支撑。资料来源:X平台及网络公开资料综合整理(封面图与文章内容无关)免责声明
1、我们整理和转载此文出于传播更多资讯之目的,不代表本号观点,亦不构成任何投资观点,由此做出的投资决策与本人本文无关!2、本文所用的视频、图片、文字如涉及作品版权问题,请第一时间联系小编:16620948826(同微信),我们将立即删除,无任何商业用途!
# 扫描上方二维码,添加小编微信 #
# 申请请备注公司+姓名+职位
转载说明:本文系转载内容,版权归原作者及原出处所有。转载目的在于传递更多行业信息,文章观点仅代表原作者本人,与本平台立场无关。若涉及作品版权问题,请原作者或相关权利人及时与本平台联系,我们将在第一时间核实后移除相关内容。
 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库