五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库当机器人跑完马拉松,这项技术的竞赛才刚刚开始

4月19日,北京,2026人形机器人半程马拉松鸣枪。
21.0975公里的赛道上,300多位人形机器人选手迈开双腿,像真正的运动员一样向前奔跑。赛道两侧,观众举起手机,无人机低空掠过,转播设备紧紧跟随,这是一场属于机器人的竞技盛宴,全世界的目光都在聚焦于此。
不少人注意到,赛道边还有一位“机器人摄像师”,背着一套专业拍摄设备,灵活地穿梭在赛道侧方,时而加速跟拍领跑选手,时而放慢脚步捕捉掉队选手的细节。它的运镜流畅、构图精准,甚至在选手之间的缝隙中找到了几个堪称教科书级的动态特写镜头。

(当虹科技“机器人摄像师”拍摄的比赛画面)
现场观众有人忍不住问:这位“机器人摄像师”的操作员在哪?
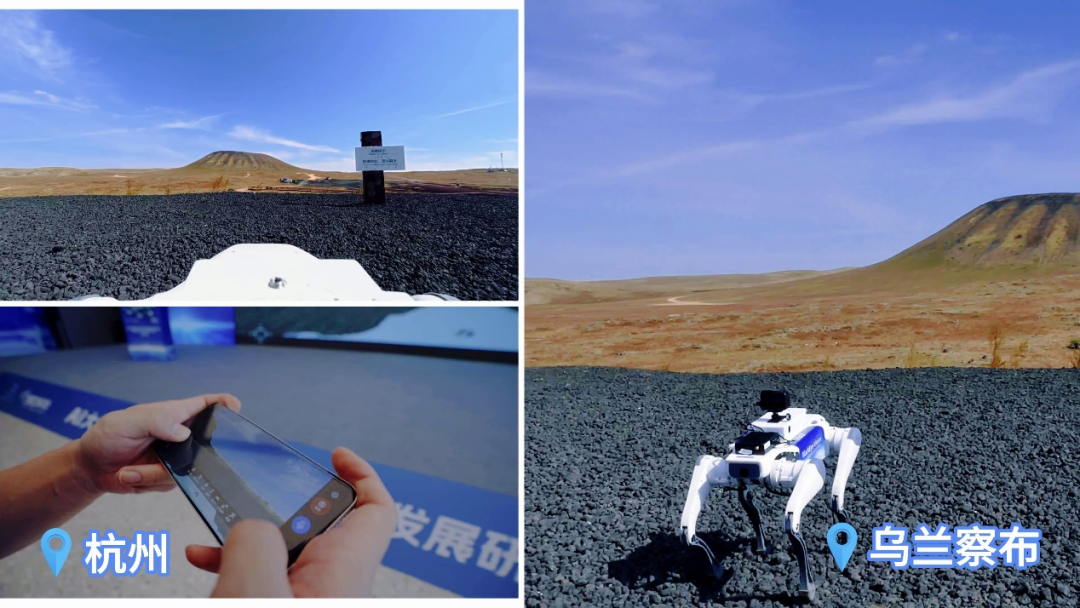
答案是:杭州。一家咖啡厅里。
操控这台四足机器人的工程师,桌前放着一杯美式,眼前的手机上实时显示着1200公里外北京赛场的画面。他滑动屏幕,千里之外的“机器人摄像师”就在赛道上改变跟拍路线,镜头也缓缓转向。整个过程延迟极小,就像他本人站在赛场边上一样。
令人意外的是,这场看似不可能实现的产品验证,竟由一家不生产机器人本体的公司当虹科技完成。
他们目前正在探索与验证的东西,远不止“机器人摄像师”拍摄机器人跑马拉松这么简单。
01.
机器人行业最不愿意面对的真相
本届马拉松赛场,近四成人形机器人在试图提升自主性,减少对近距离遥操的依赖。然而,这正是当下机器人行业最不愿意面对的真相。
企业是为了展示自主性,但真实的场景中,完全自主的机器人其实离我们还很远。
因为现实世界里,一只突然出现的动物、一辆违停的货车、一滩没人清理的积水、一段信号突然中断的盲区,任何一个教科书上没写的意外,都可能让一台自主机器人当场宕机。“理想环境”这四个字,本身就是一个巨大的限定条件。
更关键的问题是:当机器人在核辐射区域、火山口、地震废墟里遇到意外时,你不可能派一个人跑过去重启它。
大家可能还记得,2011年福岛第一核电站事故后,机器人被大量用于高辐射、狭窄、人员难以进入的环境调查与后续退役作业,但第一批机器人到了现场后却犯难了,不是因为辐射影响硬件,而是在极端环境下,通信链路断了,数据传不出来,操作员看不见里面的情况。
我们制造机器人的初衷,是让它代替人去到人不想去、不能去、去了有危险的地方。但现实是,大部分机器人依然离了人就趴窝,部分场景也不放心完全放手。
近期我们在调研中就听到一个很现实的故事。广东一家做清洁机器人的公司,产品已经卖到全国几十个城市。每当新项目交付,都需要派工程师飞到当地,花3-5天时间完成机器人在新环境中的部署调试,建图、标路径、调参数、跑测试。一个熟练的部署工程师,全公司不超过10个。但每个月要交付的项目有几十个。人飞不过来,而且后期出现问题,还要往现场跑。
这就远程遥操价值在2026年被越来越多人看见的原因。它不是一个锦上添花的功能,而是机器人从能用到敢用,从近距离遥操到具身智能之间,那座必须跨过去的桥。
02.
从替身到自主,这座桥如何跨越?
这座桥如何跨过?并不是一跃而过。机器人大讲堂在与多位行业专家交流后发现,这座桥少不了四道“桥拱”支撑,并且每个支撑都指向一个无法绕开的现实需求。
第一道支撑是机器人作为替身,帮助人类去危险或者去不了的地方。福岛核泄漏十五年过去了,前面提到的问题,依然是全球核工业的噩梦。其实,不只是核电站。火山口的气体采样、地震废墟里的生命搜索、深海管道的裂缝检测、高空输电线路的覆冰巡查,所有这些场景都有一个共同特征,人进不去,但信息必须出来。
前面提到的当虹团队,去年完成了一次技术验证,操控一台四足机器人,跨越1700公里,从远端控制室实时操控它走进乌兰察布一座火山的边缘地带,完成了气体数据采集和高清影像回传。这无疑就是人类替身的最佳表现形式。
(跨越1700多公里,当虹科技工作人员“隔空”指挥机器狗探火山)
第二道支撑是分身能力,让一个专家变成十个。前面提到的清洁机器人公司,后来他们接入了远程遥操模块。部署工程师坐在总部,远程接管机器人的传感器和运动控制,在线完成环境建图和路径规划。一个人一天可以处理3-4个城市的部署任务,效率直接翻了好几倍。
“让稀缺的专家资源脱离物理空间的限制,实现一人多机、一人多地的效率跃升。”北京一所重点大学控制学院的教授也和我们说,这对于许多已经实现批量化部署机器人厂商来说尤其关键。如果你的产品每卖到一个新客户,都需要派一个人去驻场,那你的商业模型永远是线性的。只有当你能远程交付、远程运维、远程处理异常时,你的业务才真正可能指数级增长。
第三道支撑是数据。对于关注具身智能赛道的玩家来说,这可能是最性感的部分。目前全球具身智能领域最大的瓶颈是什么?不是算法,不是算力,不是硬件。而是数据。更准确地说,是真实世界中、真实物理交互的操作数据。
大语言模型可以在互联网上找到几乎无限的文本数据来训练。但一台机器人在不规则地形上迈步、在复杂障碍间穿行、在变化光照下识别目标的操作数据,从哪里来?答案是从人类的操控中来。对一些复杂、危险场景来说,超远距离远程遥操在实现替身、分身的同时,还在同步积累数据——操作员在这个时刻看到了什么画面,做出了什么决策,发出了什么指令,机器人的关节如何响应,地形如何变化,任务是否完成。这些数据都能够成为未来具身智能模型的燃料。
最后一道支撑是兜底,远程遥控其实也是自主智能的最后一道安全网。这一层可能是最容易被忽视的,也是最重要的。目前人形机器人与具身智能行业里最主流的机器人部署模式,叫自主化,机器人按预设路线自动行走,自动拍照,自动记录数据,不需要人干预。但每一个做过现场部署的人都知道,不需要人干预只是一个美好的愿望。
03.
为什么这件事比看起来难十倍?
看到这里,可能有人会觉得:远程遥操不就是视频传输+远程控制吗?视频会议不是都在用吗?无人机没有远程操控不是也在飞吗?
如果你真的这么想,说明你还没走进过现场。用一个最直观的对比来说明远程遥操与普通视频通信之间的鸿沟:你在办公室里开视频会议,画面卡了一秒,你最多皱个眉头。但一台机器人在核电站内部执行精密操作,画面卡了一秒,操作员可能在那一秒内发出了一条错误的运动指令,导致机器人撞上了反应堆容器壁。
再比如无人机操控依赖图传可以飞很远,这是因为无人机是在天上飞,缺少遮挡,而机器人我们要放在狭小、复杂的环境里面,图传技术在建筑物遮挡的情况下画面很快就会出现卡顿。
这就是延迟这个参数在不同场景下的分量差异。
那么远程遥操到底难在哪? 其实,远程遥操对通信链路的要求,至少要闯过四道关。每一项,都是一道工业级的硬题目。

(跨越1300公里,身处山西文博会现场的当虹科技工作人员,远程操控机器人直播西湖)
首先是延迟问题。人类神经系统从眼睛接收画面到大脑产生反应,极限是100毫秒左右。也就是说,如果视频传输的延时超过100ms,操作员的反应就会出现时延,他看到的画面已经是过去式,而他基于过去的画面做出的操作,又会在未来的某个时刻才生效。这种时延在日常视频通话中可以忍受,在远程操控精密机器人时可能是致命的。
其次是画质。机器人回传的画面不是给人看个大概的,而是需要提供给操作员做精确决策。变电站巡检要看清表计读数,管道巡检要看清焊缝裂纹,夜间巡逻要在几乎全黑的环境下识别人形。这就要求在极限压缩的前提下,还要做画质增强,例如去抖、去雾、夜视增强、超分辨率重建,这些都非常考验一个公司的技术积淀。
第三道关,是我们要提到的多模态。不同模态的信息作用不一样,比如摄像头最大的优势,是信息丰富,但容易受到光照等环境影响;雷达点云数据则擅长识别障碍物的准确位置,擅长回答“离我多远”“空间结构是什么样”。
目前空间视频、激光雷达、红外与多光谱、单目深度感知等先进技术,更多用于智能网联汽车等领域,尚未在机器人行业内得到广泛应用。我们了解到的案例是,当虹科技已经能对机器人的多模态数据进行处理了,这样操控人员不仅能看到高清影像,还能通过三维空间数据感知地形起伏、障碍物距离,获得接近真实的临场感。
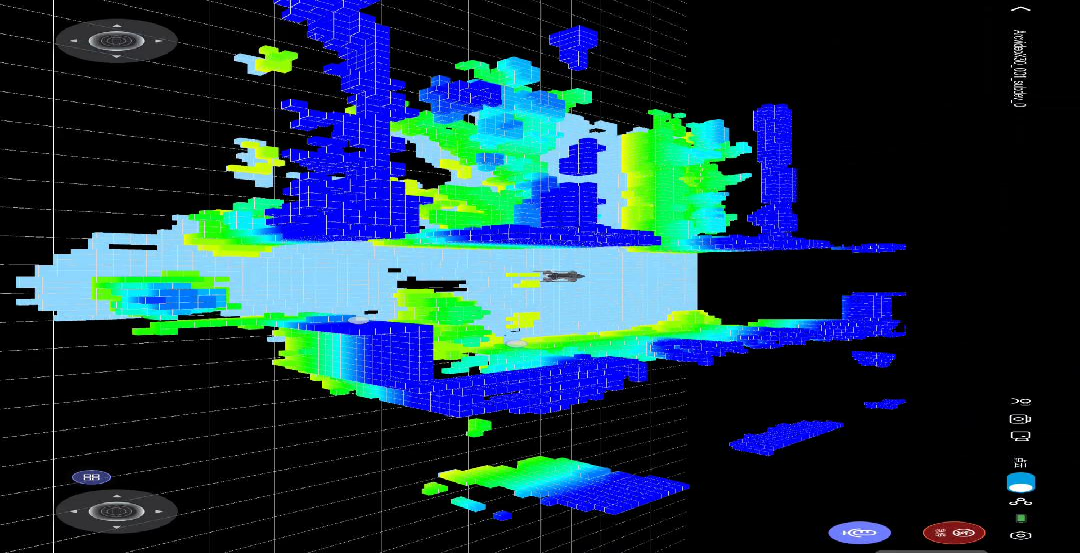
(当虹科技BlackEye Vision融合处理视频、音频、激光雷达、图像、信令、文本等多模态数据)
在解决延迟、画质、多模态的问题后,机器人想要进入更广环境,想要哪里都能用,还有全网适配的问题。因为未来机器人的价值,恰恰体现在信号不好的地方,地下管廊、远洋船舶、沙漠油田、高海拔矿区、火山口。这些场景的实际部署中,可能面临4G、5G、卫星、专网、自组网等不同通信环节。链路必须能识别所有网络制式、适应所有带宽条件、在任何一种网络上都跑得起来。甚至在短暂断网后,还要能自动恢复连接、补传关键数据。这些都对技术实现提出了近乎苛刻的要求。
这四道关,任何一道单拿出来都够一家公司啃几年。全部做到工业级可用,需要的不是灵感,是积累。
04.
一个不像机器人公司的关键玩家
有意思的是,在远程遥操这个领域,我们发现了开头提到的这个很不寻常的角色——当虹科技。
如果你在机器人领域没听过这个名字,那也很正常。因为这家公司过去三十年干的事情,和机器人关系并不大。1994年,这家公司开始做视频编码。那时候中国还在用模拟电视,数字电视都还是个概念。此后的三十年里,他们给央视做了8K超高清编码系统,给卫星运营商做了卫星视频压缩传输。他们的核心技术一直在一条线上:怎么把又多又重的视频数据,在又窄又不稳定的通信管道里,又快又清晰地传过去。
视频压缩、低延时传输、弱网适配、画质增强,这些当虹科技在做的关键词串起来看,恰恰和前面列出的远程遥操的四道技术难题有着高度重合。这不是巧合,更像是技术演化的必然路径。
我和同事在调研后感叹,当虹做远程遥操,不是跨界,而是降维。他们用三十年积累的视频编码能力,把远程遥操的端到端延时压到了80毫秒,比人类神经反应极限更快,这意味着操作员看到的画面和真实场景之间几乎没有时差,操控手感接近就在现场。
他们的视频压缩算法,常规场景下能实现10倍左右的压缩比,保证画质基本不变,在卫星链路等极限带宽场景下,压缩比可以拉到10-100倍。这意味着卫星链路上,其依然能传输可用的高清视频流,这在任何需要远程控制的行业都是相当硬核的能力。
还有多模态融合传输、全网自适应切换、AI画质修复与增强,这些他们所具备的能力也并不是重头研发的,而是在过去三十年的广电、航天、公安项目中反复打磨过的成熟技术模块,现在被重新融合,装进了一个叫BlackEye Vision的超远距离远程遥操系统里。这使得一个做了三十年视频传输的公司,拿出一套从延时到压缩到画质到网络全链条打通的解决方案,突然出现在机器人赛道上,却并不令人意外。
当然,更值得关注的是他们选择的切入领域。“我们不生成机器人‘身体’,但赋予机器人‘灵魂’和‘技能’。”在调研中,当虹产品经理提到的这句话让我们为之一震。原来,当虹不做机器人本体。不做关节电机,不做运动控制算法,不做具身大模型。他们只做一件事:通信链路层和多模态融合。用一个可能不太严谨但很直观的比喻,如果把机器人比作人的身体,具身大模型是大脑,运动控制是小脑和脊髓,那当虹做的就是神经系统,连接大脑和四肢的那根高速通道。没有神经系统,大脑再聪明,四肢再灵活,也只是一堆互不相关的零件。但当虹将它们串了起来。

(跨越1700多公里,当虹科技工作人员“隔空”指挥机器狗探火山)
最终,当虹提供的标准化远程遥操能力模块,可以被任何机器人本体厂商集成。无论是四足机器狗、轮式巡检机器人、人形机器人,接入这个模块就能获得超低延时、超高压缩、多模态融合的远程遥操能力。
对本体厂商来说,这意味着不需要自己重新造一遍通信链路的轮子。面向电力、公安、石油、应急等行业客户,当虹提供端到端的巡检解决方案。不只是给你一个通信模块,而是从机器人选型、任务规划、远程操控、数据回传到报告生成的全链条交付。
对行业客户来说,这意味着不需要自己去做机器人+通信+平台的系统集成。当虹还提供一个多机器人汇聚控制平台。这类似一个操控中台,能同时管理不同品牌、不同类型的多台机器人,统一调度、统一监控、统一数据管理。这个架构让我想到了一个类比:智能家居领域的米家。
在智能家居早期,每个品牌的设备都有自己的App、自己的协议、自己的生态。用户买了五个品牌的设备,手机上要装五个App。后来米家做了一件事:统一协议、统一平台、统一控制,不管你是什么品牌的灯、什么品牌的锁、什么品牌的摄像头,接入米家就能统一管理。
机器人行业今天也面临同样的碎片化问题。一个电力公司可能同时采购了三家厂商的巡检机器人,每家的操控系统互不兼容,数据格式各不相同。当虹想做的,是在通信和控制这一层建立一个统一平台,让不同品牌的机器人都能说同一种语言。
这让我们突然意识到,一个做了三十年视频技术的老兵,正在用模块+方案+平台的三层架构,在机器人行业里构建一个关于连接的基础设施。
05.
结语与未来
人形机器人马拉松背后,其实让更多人看到一个更本质的问题上。
行业里有一种声音认为,远程遥操是机器人走向具身智能必经之路,但只是一个过渡阶段的产物,等具身智能成熟了,机器人完全自主了,遥操就没用了。
这种观点的逻辑缺陷在于,它假设了一个机器人100%自主的终局。但如果你看看自动驾驶行业的发展就会明白,L5级别的完全自动驾驶,喊了十年了,至今没有任何一家公司敢说不需要人类介入。
机器人也是一样。即使在最乐观的技术预期下,未来十年内,人类远程监督+异常接管仍然会是绝大多数商用机器人的标配运营模式。更重要的是,正如前文所述,远程遥操本身就是具身智能训练数据的核心来源。如果没有大量的人类遥操数据,具身大模型的训练在固定训练场必然存在局限性。
所以远程遥操不会消失。它会从操控工具演化为数据管道,最终成为机器人产业的基础设施。
就像互联网时代的TCP/IP协议,你不会天天想起它的存在,但没有它,整个数字世界就无法运转。
远程遥操之于机器人,也将如此。

(工程师使用手机遥操机器人拍摄马拉松中段)
回到文章开头那个杭州咖啡厅里的工程师。
他那天在北京赛道上操控的只是一台摄像机器狗,完成的只是一次直播跟拍任务。但他所使用的那条通信链路,已经实现了80毫秒延时、千公里级距离、公网环境下的实时操控。这条链路所承载的可能性,远远超出了一场马拉松转播。
核电站、火山口、地震废墟、深海、矿井、太空,所有人类想抵达但无法抵达的地方,都在等待这样一条链路。
机器人跑完了马拉松。但对于远程遥操来说,真正的长跑才刚刚开始。
END

工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 阿童木机器人 | 极智嘉 | 海康机器人
服务与特种机器人企业
亿嘉和 | 晶品特装 | 七腾机器人 | 史河机器人 | 普渡机器人 | 施罗德机器人 | 库犸科技MAMMOTION
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技 | 智身科技 | PNDbotics | 卓益得机器人 | 鹿明机器人 | 擎朗智能| 伽利略GALILEO | 天机智能
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 戴盟机器人| 视比特机器人| 星海图 | 月泉仿生 | 零次方机器人 | 中科深谷 | 智平方 | 大咖机器人 | 灏存科技| 具识智能 | Xynova曦诺未来 | 非夕科技 |未来动力 | 博登智能 | 千诀科技 | 灵生科技 | 集萃智造 | 欣佰特科技 | 晨昏线科技 | Dexmal 原力灵机 | 优理奇
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 水木东方|康诺思腾 | 迪视医疗
上游产业链企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 鑫精诚传感器 | 蓝点触控 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 因克斯 | 巨蟹智能驱动 | 凌云光 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代 | HIT华威科 | 星汇传感 | 凌迪科技 | 泉智博| CubeMars