马斯克摊牌了:你们看到的专利技术,行不通,Optimus V3已弃用!!!
发布时间:2026-04-21来源:人形机器人洞察研究

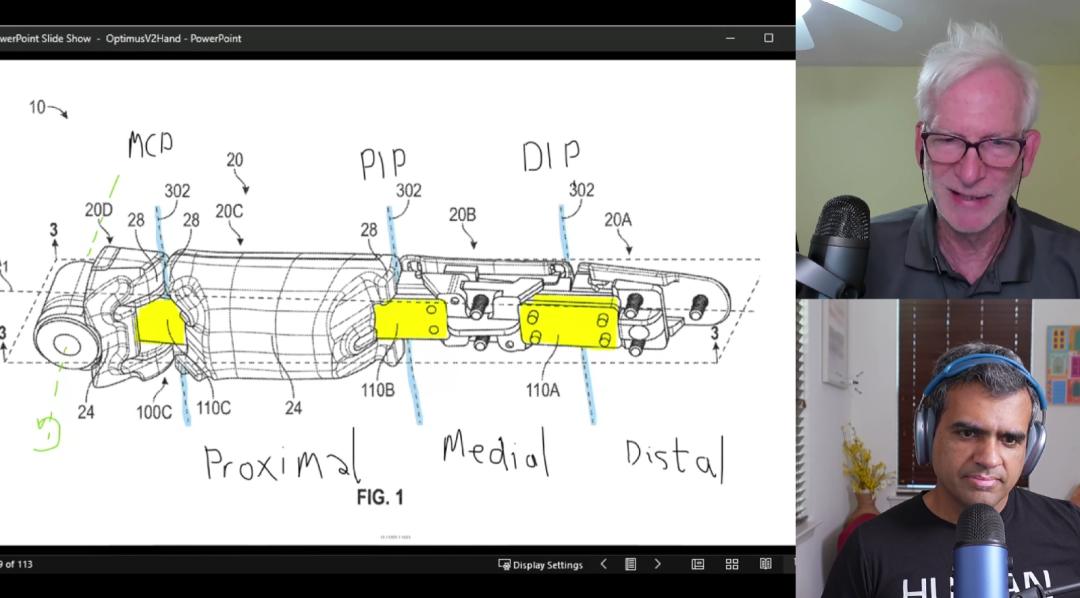
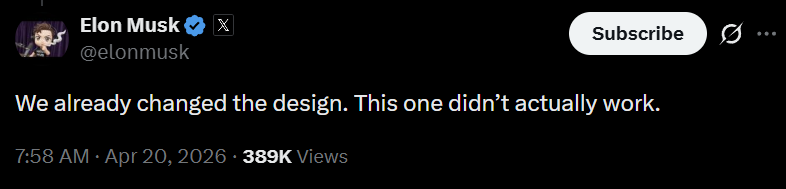
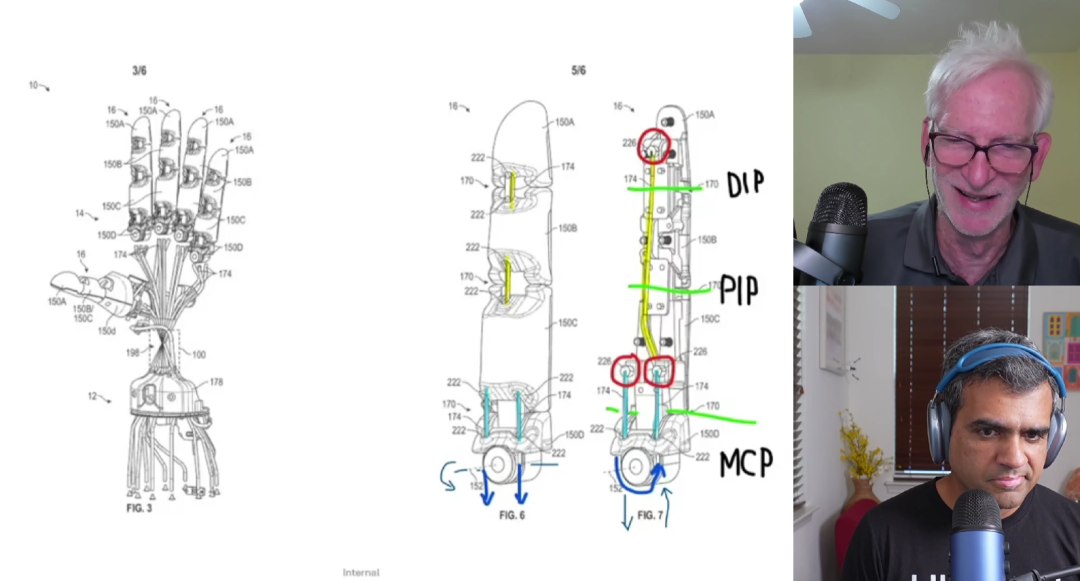
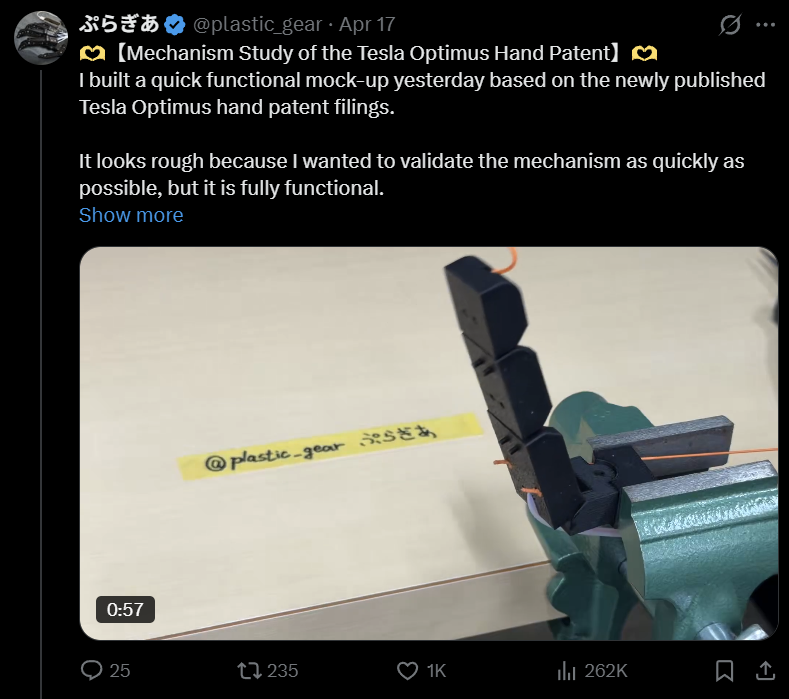
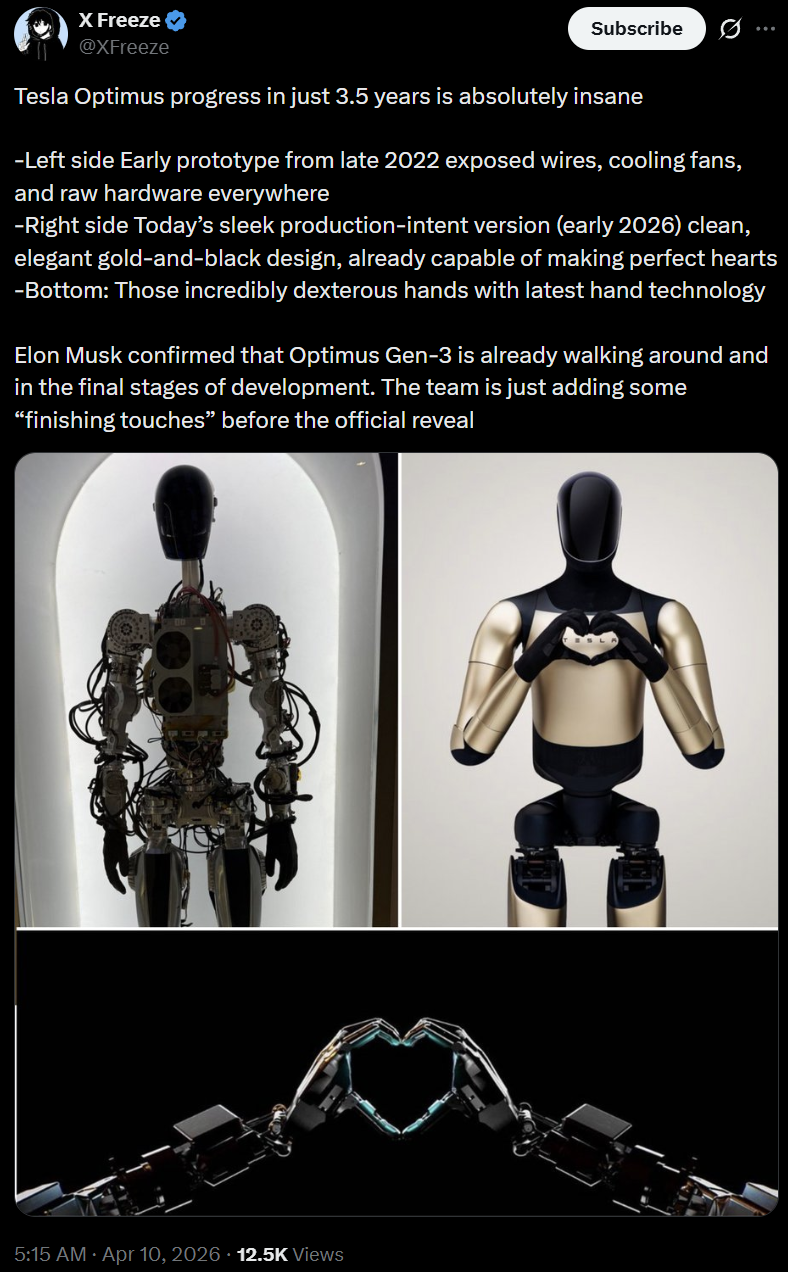
温馨提示:扫描文末二维码,加入知识星球,免费下载2700+行业报告(包含海外投行报告);商务和研究咨询合作请联系16620948826(同微信)2026年4月16日,Tesla在世界知识产权组织(WIPO)一次性公布了五项Optimus手臂与手部相关专利,这些专利详细描述了无销钉(pinless)指关节、滚动接触(rolling contact)机制、复合柔性构件(composite flexible member)以及缆线中性面路由等创新设计,迅速引发全球机器人爱好者和工程师的热议。科技博主seti_park和机器人专家Scott Walter专利的进行了解读,然而,就在解读视频发布数小时后,Elon Musk亲自回复表示:“We already changed the design. This one didn’t actually work.”(我们已经更改了设计,这个方案实际上没用)。专利尚未“凉透”,内部测试已宣告其淘汰,从早期Gen 1/Gen 2的传统销钉关节,到Gen 3的滚动接触柔性设计,再到Musk亲口确认的“已弃用”方案。Musk长期强调“手部是机器人最难的部分”。Scott从最基础的关节原理切入:传统机器人手指多采用“销钉铰链”(pin joint),如同门铰链,旋转轴固定、摩擦小、稳定,但存在磨损、缆线绕行困难、无法完美模拟人体滚动-滑动运动等问题。他用生活比喻解释——门铰链打开后不会自动回位,而人类手指弯曲后可自然回弹。 随后,Scott聚焦专利核心创新:无销钉的“滚动接触指关节”。他逐帧放大专利等图纸,指出指骨(phalanges)之间不再有钢销,而是通过复合柔性构件(composite flexible member)连接。该构件呈“三明治”结构:外层为高弹性橡胶/弹性体(elastomer,如硝基橡胶、硅胶或氯丁橡胶,Shore 60A硬度),中间层为高强度各向异性材料(anisotropic material),可能是Vectran液晶聚合物织物(NASA火星着陆气囊材料)或Nitinol镍钛合金(心脏支架材料)。中间层提供“各向异性刚度”——在弯曲方向(旋转)柔软,在其他五自由度(平移、扭转)上极度刚硬,从而同时实现连接、弯曲约束和被动回位弹簧功能。 Scott特别强调“滚动接触”表面:两段指骨相接触的曲面在弯曲时相互滚动,旋转轴随弯曲过程动态移动(类似人体指关节的rolling-sliding motion),而非固定轴。这使得手指运动更平滑、自然,避免了传统销钉的“阶梯式”弧线。同时,柔性构件的中性弯曲面(neutral bending plane)允许传感器缆线直线穿过,几乎零应力,大幅提升寿命。视频还展示了关节覆盖件(covers)如何包裹、滚动接触点如何“研磨”配合,以及弯曲时柔性层如何压缩/拉伸实现被动回位(无需额外回位弹簧)。 Scott总结该设计虽简化工程、减少零件、提升可靠性,但也存在材料疲劳、制造公差等新挑战。他幽默地表示:“这不是简单门铰链,而是更聪明的‘鞍状关节’(saddle joint)。”整个视频技术性极强,配以实时字幕,适合工程师观看,却也让普通观众直观感受到Tesla在“仿生”上的极致追求。正是在这段视频发布后,Musk的回复直接宣告:这一方案已被内部淘汰。seti_park撰写文章内容称,2025年10月Tesla曾因手部/前臂过热、磨损、握力不足等问题暂停Optimus量产,马斯克在Q3 2025财报电话会上称“手和前臂的机电难度超过机器人其余部分的总和”。传统销钉关节的“暴政”——磨损、缆线疲劳、无法模拟人体滚动运动。Tesla的替代方案是复合柔性构件,三层结构:两层弹性体夹中间高强度层(Vectran或Nitinol,抗拉强度≥895 MPa),通过“各向异性刚度”实现单一旋转自由度,同时提供被动回位和中性面缆线路由。seti_park详细解释了三大优势:1)滚动接触而非固定枢轴,运动轴随弯曲动态迁移,更接近人体;2)弹性体自然提供回位力,无需额外弹簧;3)缆线沿零应变中性面直穿关节,避免反复弯折疲劳。文章还指出该关节是整个手臂专利栈的基础——后续专利的缆线路由、腕部双自由度、25个致动器前臂布局、25自由度整体控制系统,均建立在其之上。最后,seti_park强调:尽管专利仍标注Gen 3,但这正是Tesla在可靠性优化层面的努力,而非架构重置;专利优先权与2024年感恩节演示时间线吻合,证明设计早已成熟。马斯克的核心观点是手部始终是最大难点。早在2025年2月,马斯克就称“Optimus手部精妙到让Fabergé蛋都显得简单,它让你对人类手掌产生全新敬畏”;2025年11月他确认V2手已“精致工程”,V3“更上一层楼”,并多次提及每只手/前臂需25个致动器。2026年3月虽提及Macrohard项目,但手部仍是硬件瓶颈的代名词。 就在专利公开后,日本工程师plastic_gear仅用一天就用3D打印做出功能性mock-up,验证了滚动接触、弹性回位及缆线减少的优势,并称“专利读起来不像炫技,而是严肃解决量产痛点”。在此之前,更有博主对比2022年早期原型与2026年量产意向版,赞叹“3.5年进步疯狂”。马斯克回复视频时直言“这个方案没用,我们已改设计”,指关节滚动接触设计虽经专利记录,但实际测试未达标,已转为下一代内部方案。这一表态瞬间刷屏,网友调侃“专利还没热乎就过时”,“抄袭者要哭了”。 Optimus手部从Gen 1/2的传统销钉,进化到Gen 3的柔性滚动接触,再到“已弃用”的快速迭代,体现了Tesla“先专利、再测试、边飞边造”的极致速度。马斯克观点始终围绕“仿生+量产”:手部必须像人类一样自然、可靠、易维护,同时致动器前置于前臂以实现纤细外形。未来V3/V4手部或将进一步优化材料疲劳、传感器集成,加速Optimus从演示走向量产。免责声明
1、我们整理、翻译和转载此文出于传播更多资讯之目的,不代表本号观点,亦不构成任何投资观点,由此做出的投资决策与本人本文无关!2、本文所用的视频、图片、文字如涉及作品版权问题,请第一时间联系小编:16620948826(同微信),我们将立即删除,无任何商业用途!
# 扫描上方二维码,添加小编微信 #
# 申请请备注公司+姓名+职位
转载说明:本文系转载内容,版权归原作者及原出处所有。转载目的在于传递更多行业信息,文章观点仅代表原作者本人,与本平台立场无关。若涉及作品版权问题,请原作者或相关权利人及时与本平台联系,我们将在第一时间核实后移除相关内容。
 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库