 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库基于 AR 阻抗可视化的 Franka Research3 机械臂遥操作设计与应用

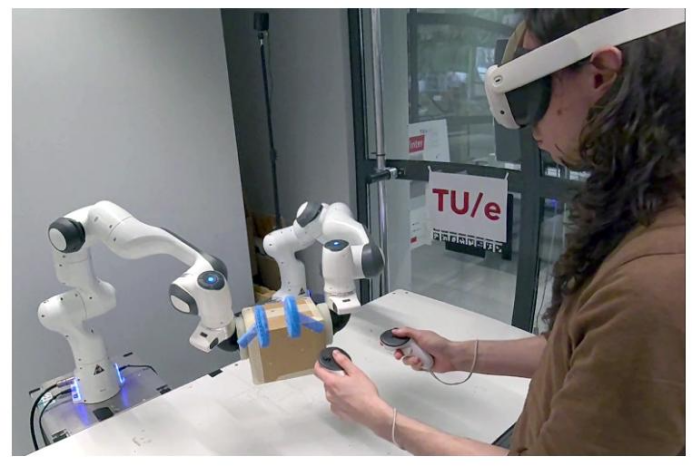
在非结构化、多接触交互场景中,机器人自主操作仍存在稳定性与适应性方面的局限,双臂协同的物体搬运、姿态调整等任务,需人类通过遥操作保障执行效果。低成本VR运动控制器虽具备6自由度跟踪能力,可实现直观的末端执行器运动控制,但缺少力反馈,操作人员难以感知阻抗控制生成的接触力,影响力控关键任务的完成质量。
Franka Research3机械臂具备完善的笛卡尔阻抗控制接口与实时控制能力,适配多接触交互任务需求。本文结合AR可视化技术,将阻抗控制器的虚拟目标位姿与位移偏差直观呈现,构建无需额外力反馈硬件的遥操作方案,并基于双臂操作实验验证其在Franka Research3平台上的应用效果。
BFT为用户提供高效的解决方案
如有产品购买需求请联系:18551727852
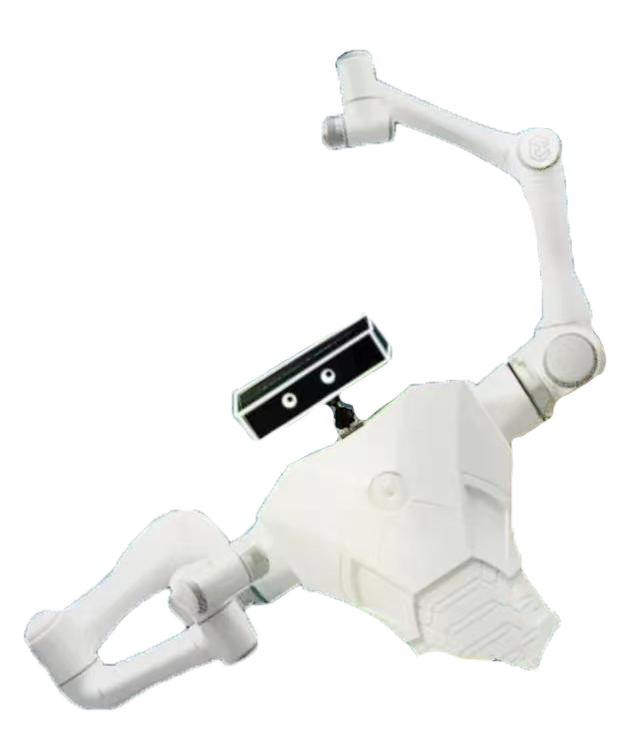
硬件与控制适配性
Franka Research3是面向科研与精细操作的协作机械臂,支持高精度关节控制与笛卡尔空间实时控制,可稳定运行阻抗控制器,响应速度与跟踪精度满足遥操作要求。其末端执行器可灵活更换,搭配定制硅胶末端,能提升与物体接触时的稳定性,适配箱体夹持、抬升等多接触任务。
该机械臂支持ROS生态,可与Unity、VR头显等设备完成数据交互,实现目标位姿、速度信息的实时传输,为AR可视化与遥操作指令映射提供硬件支撑。
阻抗控制原理
Franka Research3的阻抗控制通过模拟虚拟弹簧 - 阻尼系统,建立机器人末端实际位姿与目标位姿的动力学关系。操作人员通过VR控制器设定目标位姿,目标与末端的偏差生成对应力觉,使机械臂在接触物体时输出可控的接触力,公式如下:
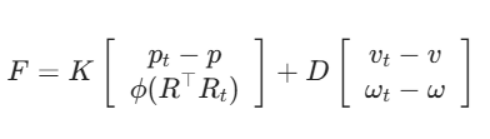
其中K为刚度矩阵、D为阻尼矩阵,F为末端执行器的广义力 / 力矩。该控制方式无需复杂力传感器,即可实现运动与力的协同调节。
可视化核心要素
针对Franka Research3遥操作中目标位姿不可见的问题,AR可视化模块叠加两类关键信息:
目标圆盘:以蓝色半透明圆盘标识末端 6 自由度目标位姿,直观反映目标姿态与位置,降低操作人员理解成本;
偏差连线:蓝色线条连接末端与目标圆盘,长度对应位置偏差,间接反映虚拟接触力大小,帮助操作人员感知力控状态。
可视化元素叠加于 VR 视频透视画面,不遮挡真实作业环境,兼顾环境感知与控制状态反馈。
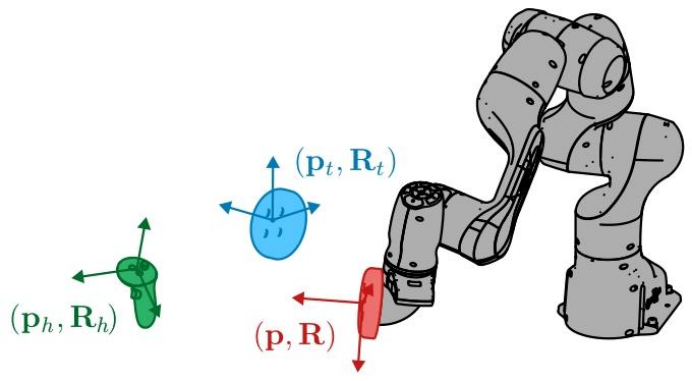
图 2 机械臂(灰色)、末端执行器当前位姿(红色)、目标位姿(蓝色)以及手持式VR控制器(绿色)的示意图,图中包含各自对应的坐标系。目标位姿属于数字虚拟对象,无法通过肉眼直接观察。
系统集成与映射逻辑
系统以Franka Research3双臂为执行终端,搭配Meta Quest 3 头显与控制器,通过Unity 搭建AR可视化环境,ROS节点运行改进版笛卡尔阻抗控制器:
握持离合器按键时,VR 控制器位姿与速度直接映射为阻抗目标位姿与速度,提升操作响应性;
松开按键后目标位姿锁定,便于操作人员调整手部姿态,避免误操作影响机械臂;
控制器降低平移刚度,减少接触冲击,适配箱体搬运等柔性交互任务。
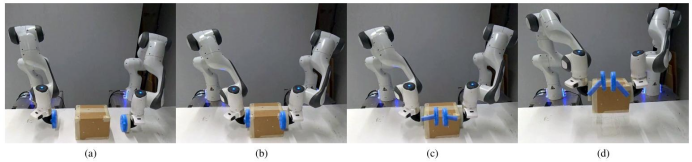
图3. 阻抗控制可视化设计的核心示意图,从操作人员第一视角呈现双臂遥操作抬升物体的全过程,用来直观说明 AR 视觉反馈如何解决力控不可见的问题。
实验设置
以Franka Research3双臂为平台,设置滑动与抬升两类箱体搬运任务,17名受试者分别在有/ 无 AR可视化条件下完成操作,记录任务完成时间,配合NASA-TLX与 SUS量表评估主观体验。
抬升任务需稳定夹持避免掉落,对力控精度要求较高;滑动任务仅需平面移动,力控需求较低,可对比验证可视化在不同力敏场景的效果。
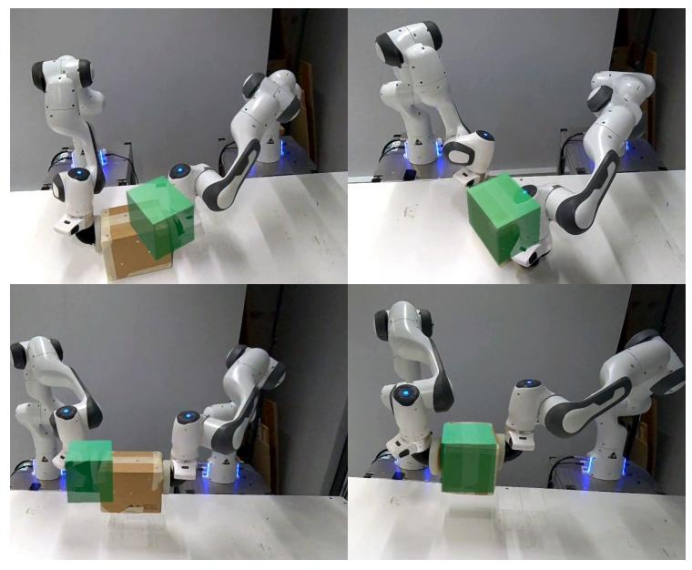
图4. 双臂遥操作两种典型任务的对比示意图
实验结果
1.任务效率:AR 可视化使抬升任务完成时间缩短约 24%,滑动任务无显著变化,说明可视化可有效提升力控关键任务的执行效率;
2.主观体验:两组条件下系统可用性与作业负荷无统计差异,可视化未增加操作负担;
3.定性反馈:受试者借助可视化快速调整末端姿态与接触力,减少目标过冲与物体掉落,部分受试者提出可优化元素尺寸与透明度,降低视觉遮挡。
基于 Franka Research3 的 AR 阻抗可视化遥操作,具备三点实用价值:
降低硬件成本:无需力反馈设备,依托视觉反馈实现力控调节,适配低成本遥操作需求;
提升操作透明度:将虚拟目标位姿显性化,帮助操作人员建立输入 - 运动 - 力的直观关联;
适配多场景:在仓储搬运、精密装配等多接触交互任务中,可快速部署并提升操作效率。
总结
Franka Research3 机械臂的阻抗控制能力与实时通信特性,为AR可视化遥操作提供稳定硬件支撑。将阻抗目标位姿与偏差通过AR实时呈现,可在不增加力反馈硬件的前提下,有效提升双臂多接触遥操作中力控关键任务的执行效率,且未显著提升作业负荷。
该方案为仓储、精密操作等场景的低成本、高直观性遥操作提供可行路径,后续可通过视觉设计优化与控制参数适配,进一步提升系统实用性与推广性。
项目详情:arxiv.org/abs/2603.25418
还想了解更多详情?
搜索我们的官网查看更多内幕
https://www.bft-robot.com/index/
点击下方关注BFT机器人
私信客服免费获取
产品信息&产品手册
编辑:春花
BFT机器人平台提供先进产品与机器人自动化技术,助力企业智能化转型升级,为您的企业生产注入发展新动能。BFT将竭诚为您提供机器人技术咨询与方案设计服务,为您提供最具价格优势的产品!


联系电话

联系电话:
18551727852
微信公众号

联系邮箱:
ming@bft-robot.com
往期精彩回顾








