五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库PNAS:这种软体机器人会“遇水变形”,游泳速度暴涨780%,还能滚动、爬坡、拉重物

驱动它前进的核心“人工肌肉”,能拉起约为自身重量 80 倍的重物。
它能地面上滚动前进,一进入水里,就自动展开“鳍”,切换成划水推进模式。它不需要复杂的传感器和多驱动器控制,而是直接利用环境刺激完成被动适应。
更厉害的是,鳍展开后,它的游泳速度可提升 780%。
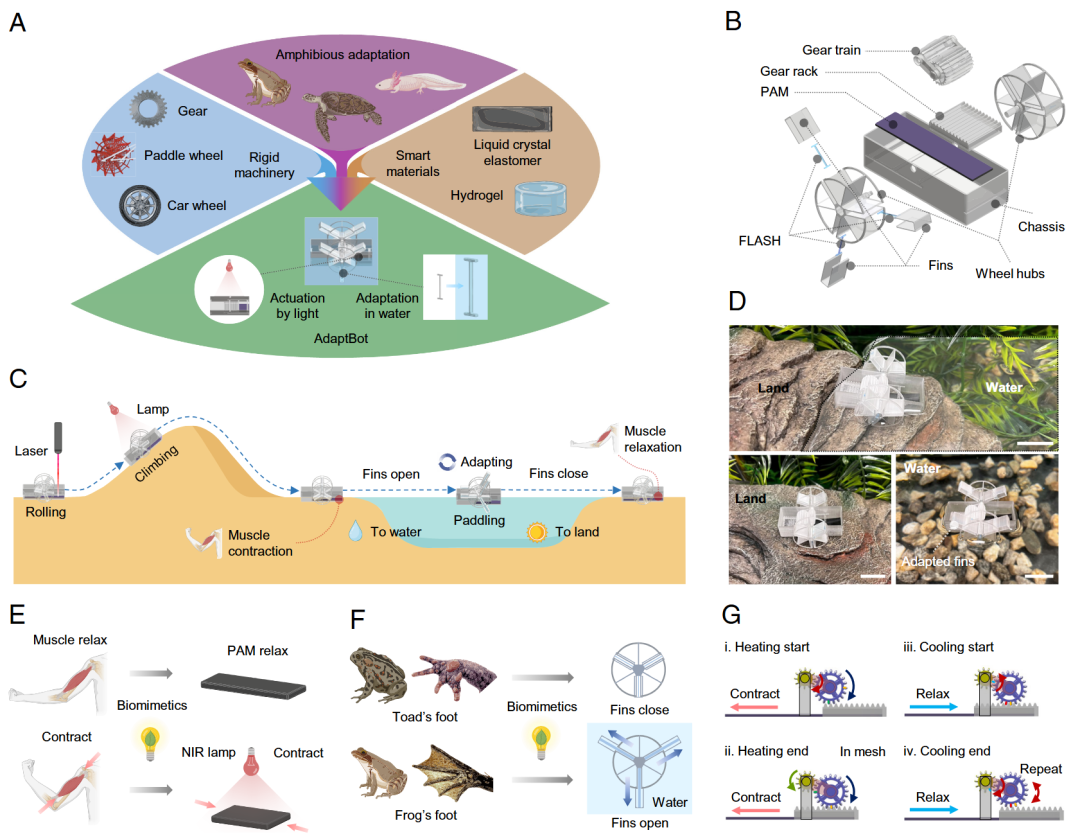
近日,来自 加州理工学院 的研究团队开发出一种两栖软体机器人 AdaptBot。它结合光驱动人工肌肉、快速大膨胀水凝胶和棘轮传动结构,在陆地、水中以及交界环境中实现多模态运动。这项研究发表在最新一期 PNAS 上。
01.
机器人为什么很难像动物一样“见环境就变形”?
移动机器人已经越来越多地被用于物流、家庭服务、生态监测和极端环境探索等场景。问题在于,现实世界的环境往往并不单一。陆地、水域、湿地、坡面,甚至它们之间的过渡区域,对机器人的结构和运动方式提出了完全不同的要求。
但现在的大多数机器人,本质上仍然依赖固定形态。它们通常只能在某一类环境中表现良好,一旦进入另一种介质,效率就会迅速下降。虽然仿生学早就告诉我们,自然界中的两栖动物会通过脚蹼、肢体和推进表面的变化来适应水陆切换,但把这种能力真正转化到机器人上并不容易。
更关键的是,现有大多数“可适应机器人”依赖的是主动机制,也就是依靠传感器、控制系统和额外驱动器来改变形状。这种方案虽然强大,但系统复杂、能耗高、硬件负担重。相比之下,能直接借助环境刺激完成形态变化的被动适应机器人仍然很少。
AdaptBot 想解决的,正是这个问题。
02.
一台会“自己切换模式”的两栖软体机器人
AdaptBot 的核心思路很直接:不是让机器人“感知后再决定如何变形”,而是让环境本身直接驱动它的形态变化。
整个系统由三部分组成:
第一部分,光驱动人工肌肉 PAM
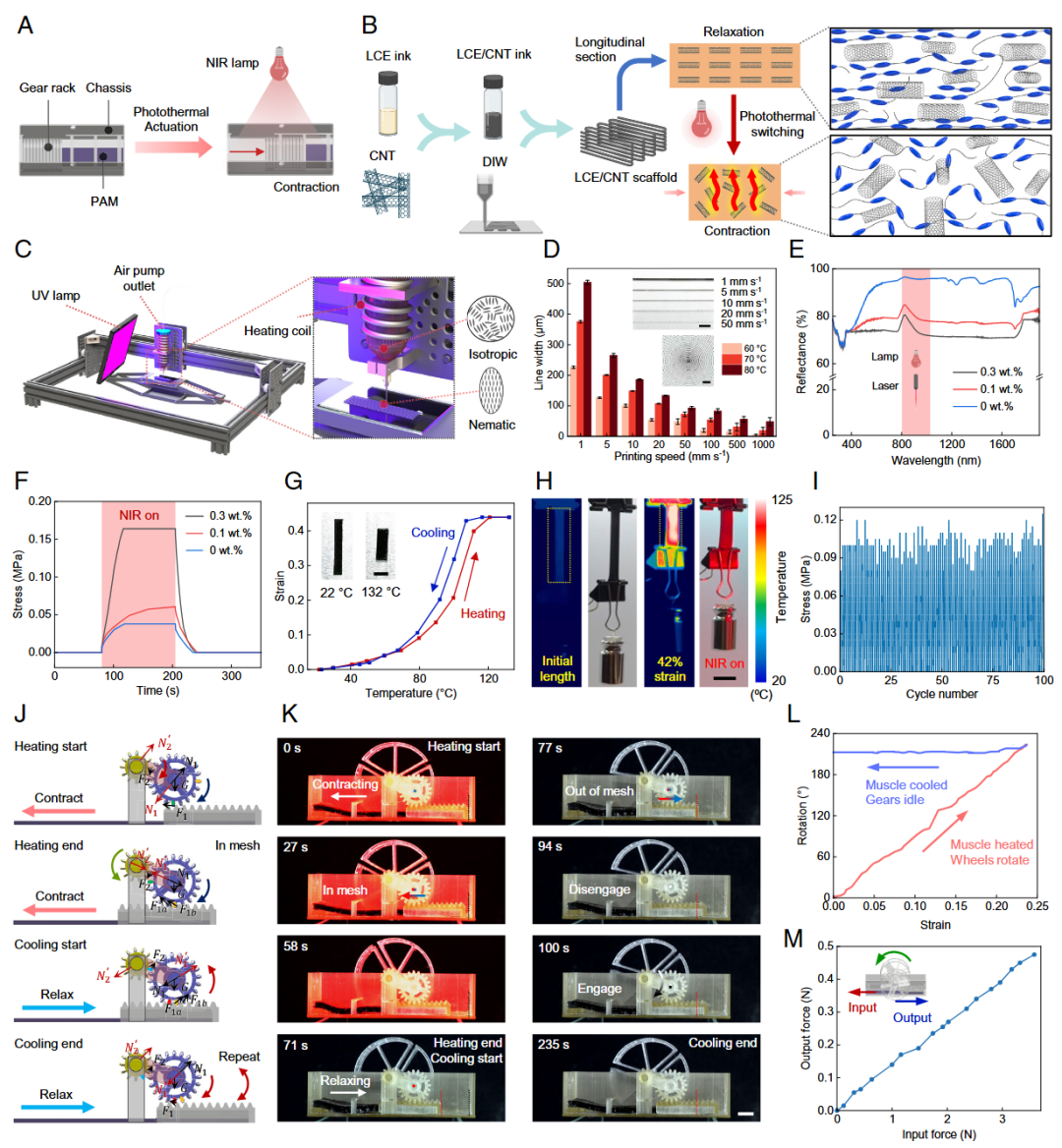
研究团队使用液晶弹性体与碳纳米管复合材料,3D 打印出一种光热人工肌肉。它在近红外光照下会收缩,冷却后又恢复原状,从而为机器人提供往复驱动力。实验中,该人工肌肉最大应变可达 44%,驱动应力达到 0.16 MPa,并在 100 个循环 中保持稳定输出。
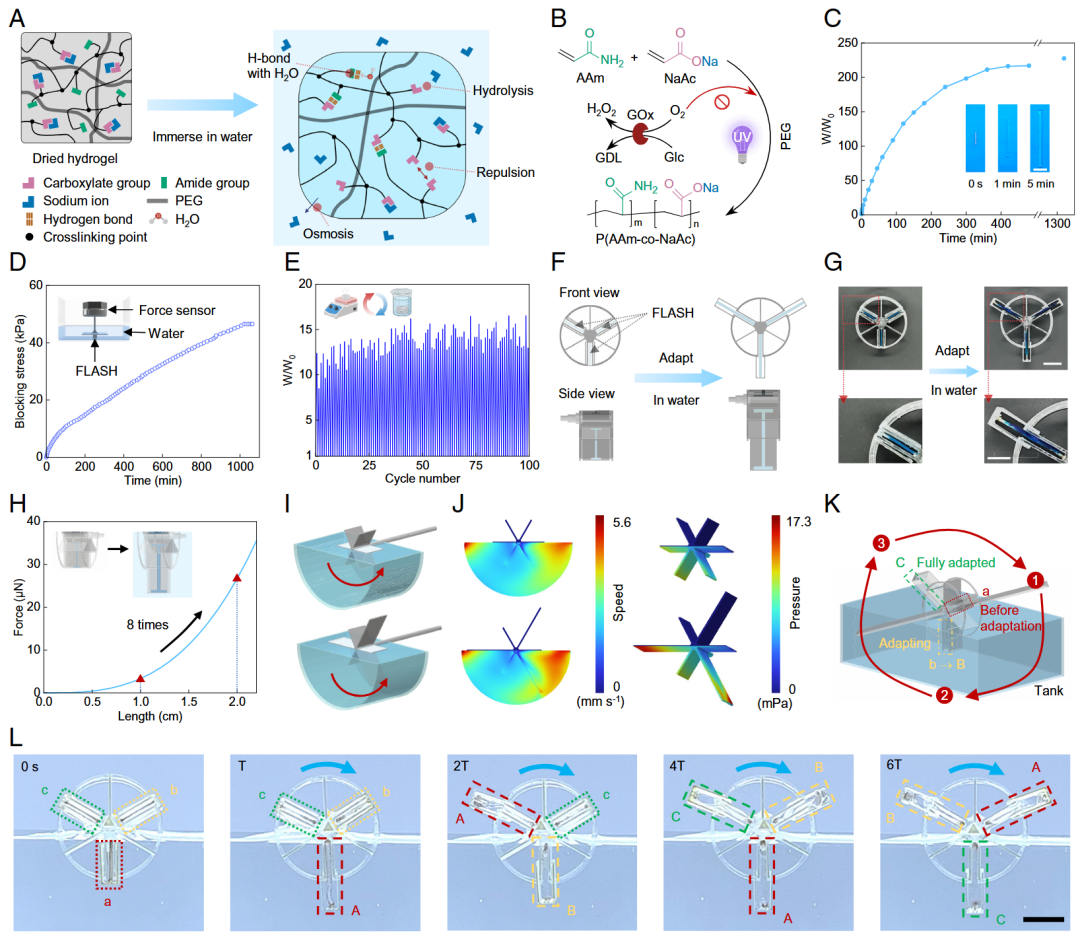
第二部分,快速大膨胀水凝胶 FLASH
这是 AdaptBot 实现“遇水变形”的关键。FLASH 在接触水后迅速膨胀,1 分钟内长度就能翻倍,最终膨胀比约 227。它被安装在轮毂和鳍之间,一旦入水,水凝胶膨胀就会把鳍向外推出;离开水后,随着失水收缩,鳍又逐渐收回。
第三部分,棘轮传动系统
人工肌肉本质上只会“拉一下、松一下”,但机器人需要持续前进。为此,研究团队设计了一套齿轮与齿条组成的棘轮机构,把 PAM 的往复运动转化为轮子的单向转动,实现“收缩时前进、放松时不后退”的推进效果。
这三部分组合在一起,让 AdaptBot 拥有了一个非常有意思的能力:
在陆地上,它像轮式机器人一样滚动;进入水中后,它不需要额外控制,鳍会自己展开,切换成划水推进。
03.
遇水展开“鳍”,推进力直接变 8 倍
为什么这个设计有效?
答案在于推进表面积。
研究中,作者给出了一个非常清晰的分析:当鳍展开后,叶片的有效长度大约翻倍,而推进力与长度的三次方相关,因此单个叶片的推进力理论上可以提升到原来的 8 倍。
数值仿真也证实了这一点。展开后的轮子在水中能推动更大体积的流体,局部流速更高,叶片表面的压强也更大,因此能够产生更强的水动力推进。
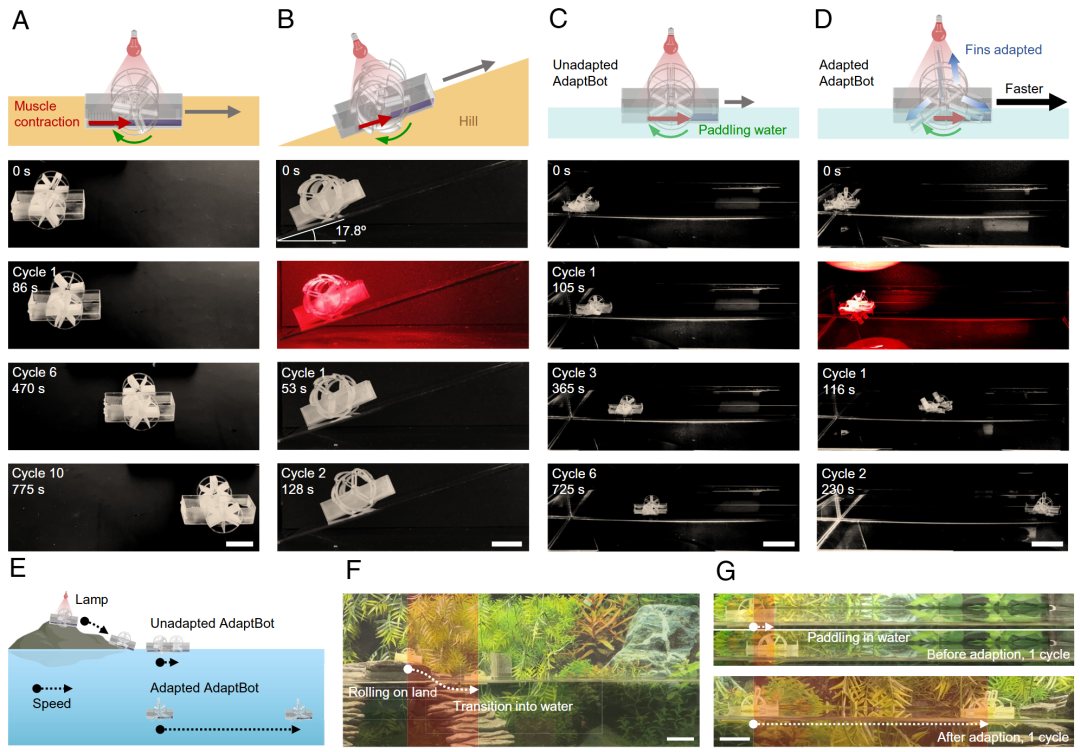
这不只是理论推导。真实实验中,AdaptBot 在鳍未展开时,水中平均速度约为 0.16 mm s⁻¹;鳍被动展开后,平均速度提高到 1.4 mm s⁻¹,提升约 7.8 倍,也就是 780%。
对于一个只用单个驱动器、同时还要兼顾陆地滚动、水中划水、爬坡和拖载能力的两栖软体机器人来说,这个结果很有说服力。
04.
不只是会游,它还能滚、爬、拖,还能在湿地和沙地上走
论文展示的不是一个只能在实验水槽里“会动一下”的机器人,而是一台真正具有多模态运动能力的平台。
实验中,AdaptBot 可以:
在平地上滚动前进
在 17.8° 坡面上实现爬坡
在水中通过划水推进
拖动达到自身体重 6 倍 的负载
在湿地、潮湿地面和沙地等复杂地形上运动

其中一个很有意思的细节是,研究团队还通过更换不同轮子模块来增强机器人对不同地形的适应能力。例如,为了在松散地表上获得更强抓地力,他们采用了类似工业车辆 paddle tire 的高牵引轮胎纹路,使机器人在沙地、湿地等环境中的滚动表现更稳定。
也就是说,AdaptBot 的环境适应性并不只来自“遇水自动展开鳍”这一种被动机制,还来自于其模块化机械设计。
一方面,它依靠环境触发自身形态变化;另一方面,它又可以通过更换部件进一步适配不同地形。
05.
这项工作的意义,不只是做出一个会游会爬的小机器人
这篇工作的真正价值,在于它给出了一种新的机器人设计思路:
让环境本身参与驱动机器人的结构变化。
过去,机器人为了适应环境,往往需要更多传感器、更多驱动器、更复杂的控制算法。而 AdaptBot 所展示的是另一条路线:通过材料与机构的协同设计,让“见环境就变形”这件事本身成为机器人的能力。
作者在文中指出,这种被动适应策略尤其适合资源受限、环境复杂、跨介质过渡频繁的场景,例如生态监测、复杂地形巡检,甚至极端环境探索。虽然目前系统在速度、热管理和更高动态扰动环境下仍有提升空间,但它已经展示出一种很有潜力的方向:
未来的机器人,也许不需要时时刻刻“算”怎么适应,而是可以通过材料和结构,天然地“顺着环境去适应”。
论文链接:
https://www.pnas.org/doi/full/10.1073/pnas.2532988123
END



工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 阿童木机器人 | 极智嘉 | 海康机器人
服务与特种机器人企业
亿嘉和 | 晶品特装 | 七腾机器人 | 史河机器人 | 普渡机器人 | 施罗德机器人 | 库犸科技MAMMOTION
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技 | 智身科技 | PNDbotics | 卓益得机器人 | 鹿明机器人 | 擎朗智能| 伽利略GALILEO | 天机智能 | 卧安机器人
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 戴盟机器人| 视比特机器人| 星海图 | 月泉仿生 | 零次方机器人 | 中科深谷 | 智平方 | 大咖机器人 | 灏存科技| 具识智能 | Xynova曦诺未来 | 非夕科技 |未来动力 | 博登智能 | 千诀科技 | 灵生科技 | 集萃智造 | 欣佰特科技 | 晨昏线科技 | Dexmal 原力灵机 | 优理奇
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 水木东方|康诺思腾 | 迪视医疗
上游产业链企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 鑫精诚传感器 | 蓝点触控 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 因克斯 | 巨蟹智能驱动 | 凌云光 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代 | HIT华威科 | 星汇传感 | 凌迪科技 | 泉智博| CubeMars