专家:马斯克曾想造一款完美灵巧手,但失败了?
发布时间:2026-05-02来源:人形机器人洞察研究

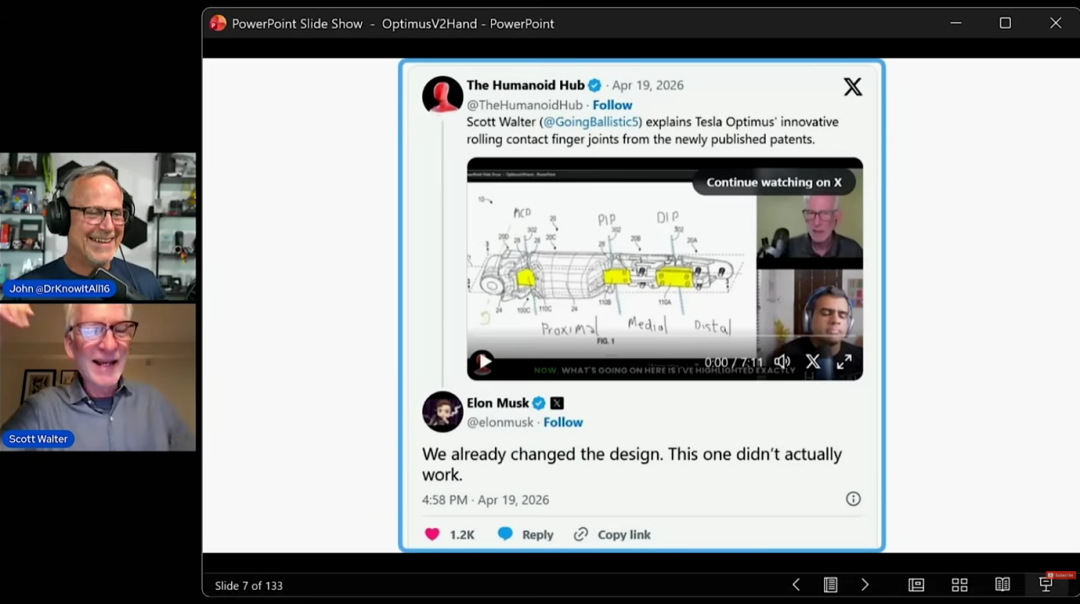
温馨提示:扫描文末二维码,加入知识星球,免费下载2800+行业报告(包含海外投行报告);商务和研究咨询合作请联系16620948826(同微信)。人形机器人的技术演进正在进入深水区,其中最复杂、也最具挑战性的子系统莫过于灵巧手。在追求高精度的本体感知与大规模量产的低成本之间,硬件架构的设计往往需要在极端的物理约束下进行艰难的技术博弈。以下结合机器人专家Scott Wolter针对特斯拉公布的灵巧手相关专利的解读,从底层工程视角,对Optimus灵巧手的核心架构重构、商业化落地风险,以及当前行业内呈现出的不同研发路线进行深度拆解。原视频链接:https://www.youtube.com/watch?v=wPR0-wo-r9I无销关节的材料学创新与挑战。传统的销轴铰链关节虽然稳定性高且能限制单一旋转轴,但在实际应用中容易受到灰尘污染和磨损困扰。新一代的硬件设计转向了无销关节架构,其核心是一种三明治复合材料结构。材料与受力机制:该结构内部采用了一种具有记忆特性的特殊镍合金,外部则包裹特定邵氏硬度的橡胶类柔性材料。
工程优势:这种设计赋予了关节在单一方向上的柔性,同时提供了极高的抗剪切和抗拉伸刚度。更重要的是,它能在卸载应力后,依靠材料本身的机械性能自动弹回初始的平直状态,从而彻底省去了复杂的金属复位弹簧。
肌腱布线与17个驱动器的协同阵列。灵巧手的控制维度取决于其复杂的肌腱布线与微型驱动器阵列。系统共配置了17个微型滚珠丝杠线性驱动器。空间布局:驱动器被精巧地分为两层,底部堆叠了12个驱动器,顶部则安置了5个驱动器。
屈肌与外展肌的耦合:系统采用了两根外展肌(Abductors)进行耦合控制。当同时拉动这两根肌腱时,会产生强大的手指屈曲(Flexion)握力;而单独拉动其中一侧,则实现手指的外展或内收动作。
主动伸展肌的必要性:早期纯靠弹性回位的设计存在致命缺陷,在施加高指尖力时,手指姿态会因缺乏对抗力而发生塌陷。为了维持稳定的物理抓取形态,系统必须引入主动伸展肌,这也是驱动器数量增加的核心原因。
SPU/PSU腕部设计的腕管空间让渡。大量肌腱从前臂延伸至指尖,必须跨越具备高度灵活性的腕部。运动干涉问题:如果直线驱动器在手腕处采用传统的上下垂直堆叠,将彻底阻断肌腱的物理穿行路径。
空间重构:为了解决这一问题,腕部采用了SPU(球面-移动-万向)或PSU结构的连杆设计。这种设计将庞大的腕部驱动器外置移向两侧,从而在手腕中轴线上精准地构建出一个宽敞的“腕管”区域。所有肌腱和鲍登管(Bowden tubes)得以在此汇聚并顺畅穿行,有效避免了多轴运动带来的拉扯与摩擦。
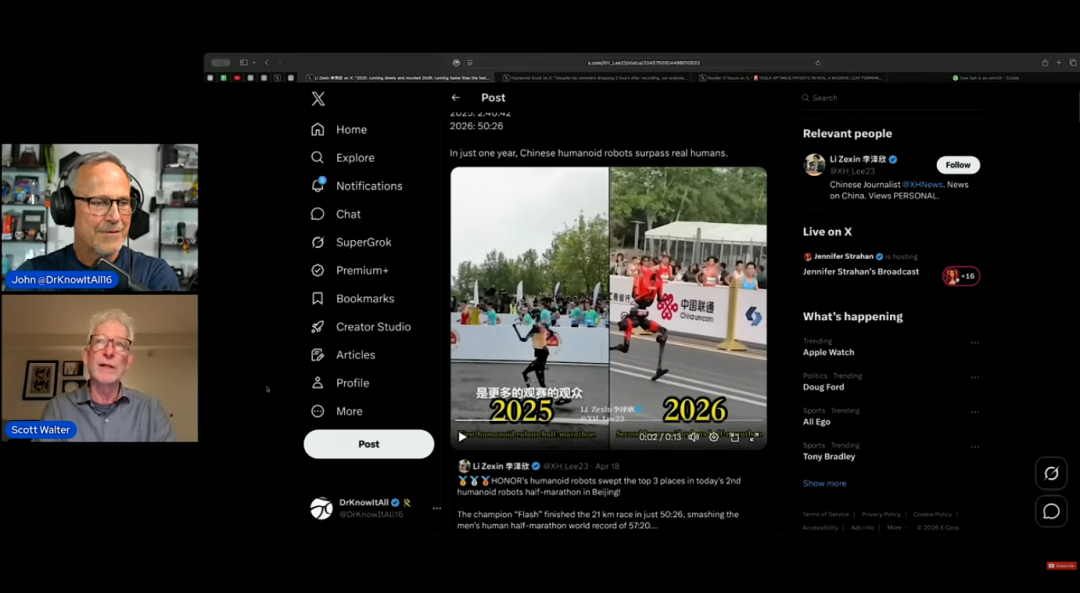
尽管前沿构型在实验室环境下表现优异,但在追求高频运转的大规模商业化落地中,硬件系统正面临严苛的底线风险。材料抗疲劳度极值:柔性聚合物及橡胶基材料在历经高频次弯折后,必然会面临疲劳老化甚至断裂的问题。此外,此类材料即使处于非作业状态,一旦暴露于紫外线或臭氧环境中,也会发生自然降解。百万次循环的现实落差:行业内所谓的100万次手指屈伸循环测试看似庞大,但折算到高强度的实际工作场景中,这仅仅相当于约1年的正常运转负荷。耐用性依然是横亘在量产前的一座大山。本体感知的编码器标定黑洞:在缺乏传统机械铰链的柔性关节中,获取精确的关节偏转角是一项极具挑战的任务。若试图将基于电阻监测的编码器夹杂在柔性材料中,其输出的信号将受到环境温度和材料形变衰减的严重干扰。这种极不稳定的底层传感数据,会导致校准难度呈指数级上升,严重拖累上层的运动推断与控制精度。工程实测的证伪与马斯克的回应:这一系列由指骨连接件(无销关节)引发的控制与耐久度隐患,最终在实测中被彻底证实。此前,诸多业内手部开发专家已对该构型的可行性表示过强烈的质疑。随后马斯克公开坦承该方案在内部尝试后证实“行不通”(It didn't work)。这种罕见的公开承认失败与及时的架构止损,不仅印证了工程界的普遍担忧,客观上也为整个行业排雷。在全球人形机器人竞速中,底层硬件的设计哲学正在发生显著的路线分化。中国团队在半程马拉松人形机器人项目上斩获50分27秒的成绩,为行业提供了一个极具参考价值的工程样本。极致的构型裁剪与减重:为了实现纯粹的奔跑性能,该机器人大胆舍弃了脚踝侧倾(Ankle roll)关节,将腿部精简为5自由度(DOF)系统。转动惯量的颠覆性优化:研发团队将原本位于膝部的重型驱动器直接上移,使其与髋部的屈曲运动轴线完全重合。这种设计极其有效地将腿部的转动惯量降至最低,大幅提升了腿部摆动时的能量利用率。暴力且高效的热管理:为应对长时间高频输出带来的热衰减,系统采用了直接挂载干冰背包的液冷循环方案,确保了极限工况下的稳定输出。这种针对特定场景(如奔跑)进行极致优化设计的理念,代表了“窄域聚焦、快速迭代”的技术路线。该路线不苛求通用性,而是集中火力解决单一应用场景的硬件痛点并迅速推向实战。相比之下,以西方头部企业为代表的研发路径,则依然固守“通用完美主义”。他们试图从第一性原理出发,在起步阶段就攻克极其复杂的通用灵巧手与全场景泛化能力,即使这需要承受极为漫长的研发周期和沉重的工程试错成本。无论是通过复杂系统实现全局通用,还是通过工程减法实现单点突破,最终决定胜负的,将是量产成本与真实场景中的可靠性底线。免责声明
1、我们整理、翻译和转载此文出于传播更多资讯之目的,不代表本号观点,亦不构成任何投资观点,由此做出的投资决策与本人本文无关!2、本文所用的视频、图片、文字如涉及作品版权问题,请第一时间联系小编:16620948826(同微信),我们将立即删除,无任何商业用途!
# 扫描上方二维码,添加小编微信 #
# 申请请备注公司+姓名+职位
转载说明:本文系转载内容,版权归原作者及原出处所有。转载目的在于传递更多行业信息,文章观点仅代表原作者本人,与本平台立场无关。若涉及作品版权问题,请原作者或相关权利人及时与本平台联系,我们将在第一时间核实后移除相关内容。
 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库