人类双手,正在成为具身智能最大的数据入口
发布时间:2026-05-10来源:人形机器人洞察研究
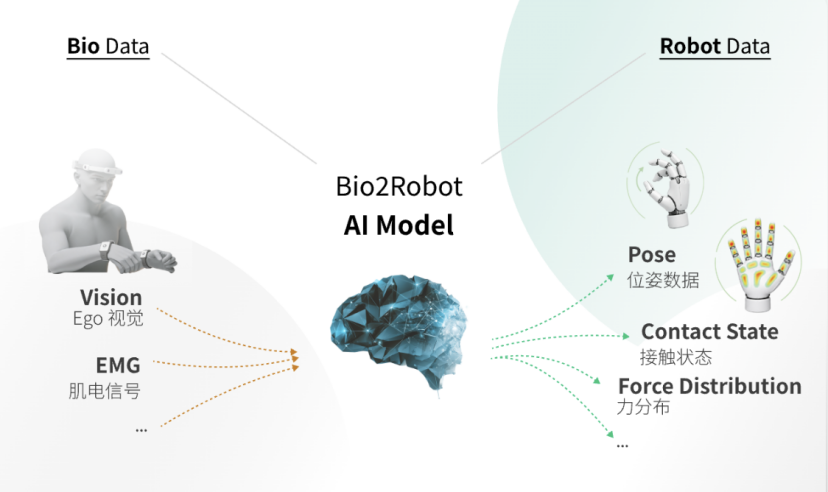
章鱼动力以 Bio2Robot 为理念内核,分层构建 DexUMI × EgoBio × Ego 三大采集路径,覆盖全模态、高精度、大规模与零干扰采集,打通从人类操作到机器人智能的数据链路。大语言模型和视频生成模型的成功,是建立在人类历史上沉淀下来的文字、图像和视频数据之上的。具身智能要让机器人在物理世界中完成认知推理、动作策略和操作执行,需要的是持续发生的全模态物理交互数据,但这类数据从未被系统地采集过。世界上,最大规模的本体是人本身,人类的双手每天都在持续生成规模最大、分布最广、操作最自然的物理交互数据。章鱼动力的目标,是建立一套系统,把人类产生的“碳基”操作信号,转变为“硅基”机器人数据。全模态:不仅要获取视觉,还要获取手部位姿、全掌接触状态与力分布。大规模:覆盖海量真实任务、场景,支撑基础模型训练。零干扰:不改变人的自然操作方式,采集人的原生行为。章鱼动力 (SynapX) 以 DexUMI 守住数据精度下限,Ego-Centric 打开数据规模上限,EgoBio 突破模态缺失瓶颈。SYNData 的核心,不是继续堆叠更多传感器,而是基于 Bio2Robot 的机制,用 AI 模型,把人类生物学信号转化为机器人可学习的数据。基于算法与硬件的协同优化,章鱼动力的 SYNData 形成了三套数采方案。采集头部视觉、手部位姿、全掌接触状态和力分布以及肌电信号。让视觉、位姿、力触和肌电在同一时间轴、同一任务中对齐。SYNData-EgoBio: 1000 倍规模化
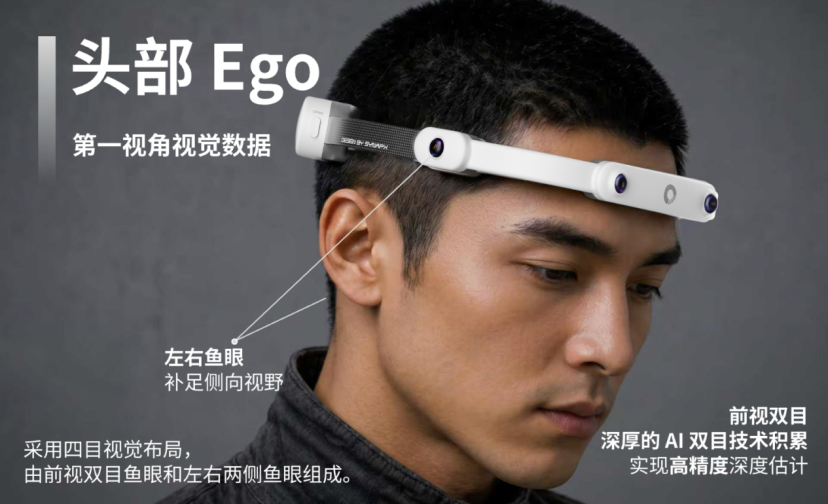
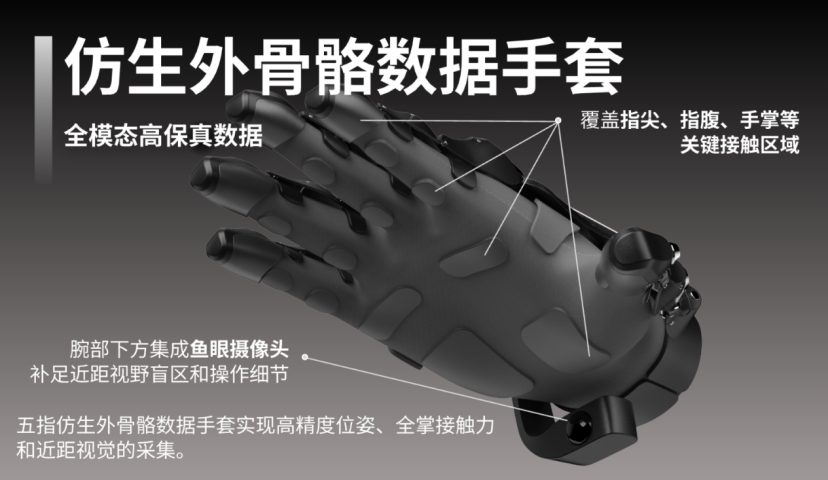
不依赖外骨骼,双手保持裸露与自由。采集 Ego 视觉和肌电信号,并利用 Bio2Robot 机制,通过 AI 模型计算得到手部位姿、接触状态和接触力分布。让原本只能在专业采集设备中获得的全模态数据,可以通过日常佩戴的形式零干扰、规模化获取。最轻量化的采集形态,用最低成本采集最大规模的操作数据。捕捉人手如何触达、物体如何操作、环境如何变化的视觉数据。采用四目视觉布局,由前视双目鱼眼和左右两侧鱼眼组成。左右鱼眼负责补足侧向视野;前视双目,基于章鱼动力深厚的 AI 双目技术积累,可实现高精度深度估计。EMG 是 Bio2Robot 的核心输入之一,它与视觉共同作为 AI 模型的输入,使得在遮挡场景下仍能恢复手部位姿与接触力分布,从而实现全模态人手操作数据的生成。采用前臂双侧佩戴,采集多通道高分辨率肌电信号。五指仿生外骨骼数据手套实现高精度位姿、全掌接触力和近距视觉的采集。覆盖指尖、指腹、掌心、掌根等关键接触区域。腕部下方集成鱼眼摄像头,补足近距视野盲区和操作细节。章鱼动力(SynapX)认为:人类的双手,是世界上最大规模的物理操作数据源。SYNData 要做的,是把这些天然存在的人类数据,通过 Bio2Robot 机制,转化为机器人可持续学习的全模态数据。肌电只是 Bio2Robot 独特创新的起点,未来会有更多生物学信号被纳入,进一步突破性能上限。
转载说明:本文系转载内容,版权归原作者及原出处所有。转载目的在于传递更多行业信息,文章观点仅代表原作者本人,与本平台立场无关。若涉及作品版权问题,请原作者或相关权利人及时与本平台联系,我们将在第一时间核实后移除相关内容。
 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库