手术机器人会替代医生吗?
发布时间:2026-05-18来源:MedRobot
【MedRobot“手术机器人误区”系列,写给以下读者】- 从工程 + 手术流程角度理解机器人真正改变的是什么
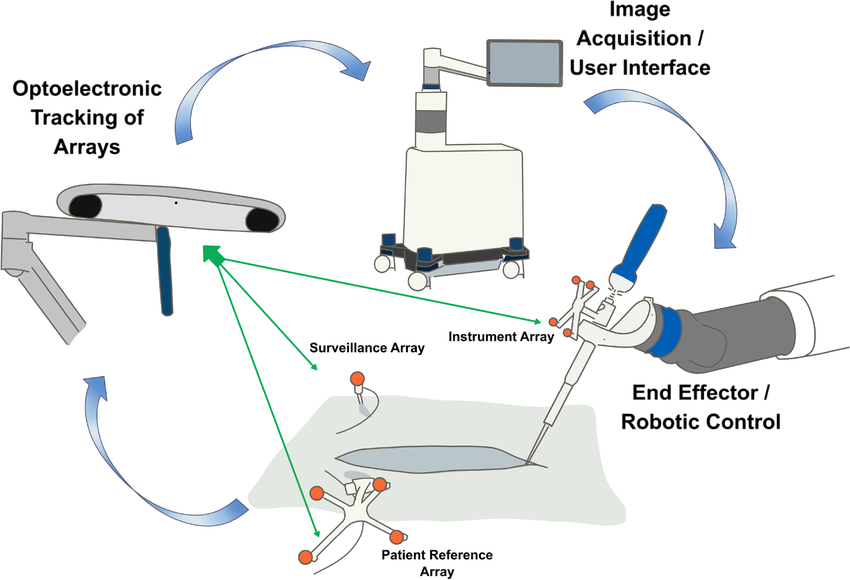
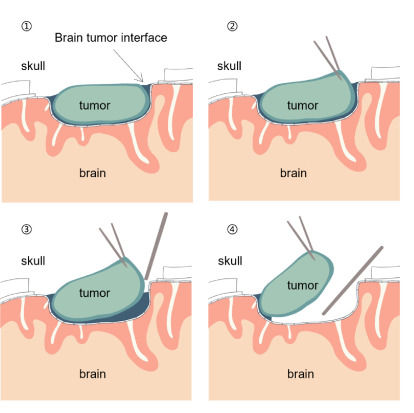
在人工智能快速发展的背景下,关于手术机器人的一种说法也变得越来越常见: “手术机器人最终会替代外科医生。”这种观点听起来充满未来感,也容易和自动驾驶、工业自动化等技术类比。但如果从当前技术结构、监管逻辑和临床实际出发,这种“替代论”更多是一种想象,而不是现实路径。既然机器能“看”、能“算”、还能“动”,那是不是终有一天可以“自己做手术”?但手术并不是标准化的工业场景,而是一个高度不确定、实时变化、风险极高的生物系统操作过程。二、当前手术机器人本质上仍是“医生决策 + 系统执行/约束”的协作结构骨科/神外机器人更多是“规划 + 导航定位 + 约束/辅助”,它们的交互方式不同,但底层协作结构高度一致:医生仍是决策主体,系统负责把决策变成更稳定、更可控的执行。包括:适应证判断、术式选择、入路与策略、风险权衡、关键步骤的取舍,以及对术中变化的即时调整。典型能力包括:定位与对齐、路径引导、抖动过滤、运动缩放、视野增强、边界限制、精确复现、过程记录等。举两个典型例子会更清晰:● 在腹腔镜手术机器人中:系统提供稳定视野、运动缩放与抖动过滤,让精细操作更可控;但是否推进、推进到哪里、遇到出血如何处理、是否转换策略——这些依然由医生判断并承担责任。● 在骨科/神外机器人中:系统能做术前规划、配准定位、导航提示,甚至提供机械约束以降低偏差;但螺钉放不放、放多深、遇到骨质差或解剖变异如何调整计划、是否更改入路——仍然必须由医生决策。因此,无论系统看起来更像“操作工具”还是“导航平台”,它都不是独立做决定的主体,而是把医生决策“工程化、稳定化、可重复化”的执行与保障平台。三、医学现实:人体不是标准化对象,手术决策无法被完全外包工业自动化之所以容易实现“替代”,是因为对象是标准化材料,环境相对稳定,偏差可控、可预设。而手术面对的是高度复杂、个体差异巨大且实时变化的人体系统:● 解剖结构差异:血管走形、骨性结构、肿瘤边界、组织粘连程度,每位患者都可能不同。● 组织状态动态变化:牵拉、切开、止血、体位变化都会改变组织形态与空间关系。● 术中情况不可完全预设:突发出血、粘连超预期、器官脆弱度差异、视野受限等,都需要即时策略调整。在这种环境里,“做不做”“怎么做”“做到什么程度”的判断,本质上是风险与收益的动态权衡:既需要医学知识,也需要经验、责任承担与伦理约束。因此,即便系统能力持续增强,手术中的实时综合判断、策略调整与风险把控,仍会长期由医生作为主体完成——机器人可以显著增强执行能力,但无法把“临床责任”从医生身上拿走。如果不从“替代”视角,而从“能力结构变化”来看,会发现更深层的趋势:这意味着,外科医生并没有被削弱,而是在向一种更偏系统控制者与决策者的角色转变。“手术机器人会替代医生”的说法,本质上是把医疗技术进步套入了工业自动化的叙事模板。但手术机器人真正带来的,不是“去医生化”,而是“去体力化”和“去波动化”。它把医生从大量依赖手部极限能力的重复性精细操作中解放出来,让医生把更多注意力放在:从产业长期趋势看,手术机器人不是在创造“无医生手术”,而是在推动外科医生从“操作者”向“系统指挥者”转型。而这,恰恰是手术机器人值得长期被看多的另一层原因:它不是在取代专业能力,而是在重构专业能力的表达方式。
综合▌微创机器人 | 佗道医疗 | 直观复星 | 威高
腔镜▌精锋医疗 | 思哲睿智能医疗 | 康诺思腾
骨科▌罗森博特 | 元化智能 | 长木谷 | 鑫君特| 史赛克
血管介入▌爱博合创 | 唯迈医疗
穿刺机器人▌真健康 | 惟德精准
手术机器人工具▌良医
转载说明:本文系转载内容,版权归原作者及原出处所有。转载目的在于传递更多行业信息,文章观点仅代表原作者本人,与本平台立场无关。若涉及作品版权问题,请原作者或相关权利人及时与本平台联系,我们将在第一时间核实后移除相关内容。
 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库