五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库北航,再发 Science 子刊!揭示微型软体机器人仿生运动新成果,开拓医疗机器人新思路


01.
腹足纲生物机理启发的流体输运机制:
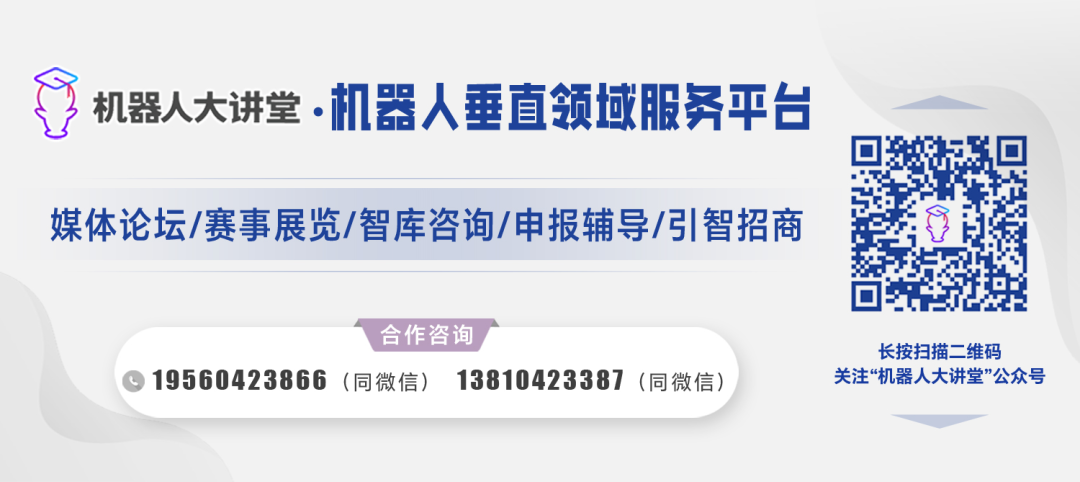
腹足类生物(如蜗牛和蛞蝓)能够沿腹足传播节律性的肌肉收缩,从而产生行波。这种能力使它们能够实现一种巧妙的界面流体调控策略:当蠕动产生的行波作用于腹足和基底之间的粘液时,即可实现流体的定向输运。受此启发,蠕动泵被广泛用于微流控系统中的流体泵送。然而,传统的蠕动泵并没有针对附着于开放表面的薄液层进行设计;此外,它们往往依赖体积较大的外部驱动源,因此在将蠕动泵送原理应用于毫米级机器人自主运动方面,仍存在技术空白。
为填补这一空白,本研究提出了一种腹足纲生物启发、无线驱动的近壁流体输运机制。该机制利用毫米尺度的磁驱预屈曲柔性薄片产生可编程的行波,从而在开放边界附近实现有效的流体操控。
02.
本研究贡献:
(1)提出基于毫米尺度近壁波浪运动的流体输运机制,建立了波形特性与输运性能之间的理论解析模型,系统分析了设计参数、驱动条件及流体性质对单个磁驱波动单元在全浸没和部分浸没条件下波形特性与输运性能的影响。
(2)探究多个波动单元间的群体行为对整体输运性能的影响,并设计开发了用于平面和复杂3D管道结构中的微型软体泵。
(3)将近壁流体输运机制应用于具有粘附运动能力的仿蜗牛微型爬行机器人。该机器人能够在不同倾角、流变特性和液膜厚度的湿滑表面,以及凹凸不平、覆盖粘液的猪胃肠道组织表面实现粘附移动。
贡献一:基于毫米尺度近壁波浪运动的流体输运机理
首先,本研究通过一种磁性软复合薄片实现了波浪运动。该磁片由嵌入钕铁硼(NdFeB)微颗粒的聚合物基体组成,并被编程为简谐波磁化分布。磁片的两端被固定在一个支撑框架上,其跨度短于磁片的自然长度,磁片从而被配置为一种预屈曲的弧形构型。当磁片置于旋转磁场中时,钕铁硼颗粒的磁化方向趋于与外磁场方向一致,从而沿磁片长度产生随时间变化且空间非均匀的力矩分布。这种相互作用在基底附近产生了行波。
为了实现更大范围内的流体输送,本研究中波动单元阵列的制备受力学引导的三维组装技术启发。二维磁片被拼接在预拉伸的柔性框架上,当预拉伸应力释放时,所有薄片将同步弯曲。尽管该框架具有柔性,但其杨氏模量高于磁片,结合纵向脊线的设计,有效地抑制了驱动过程中框架产生的不必要弯曲。
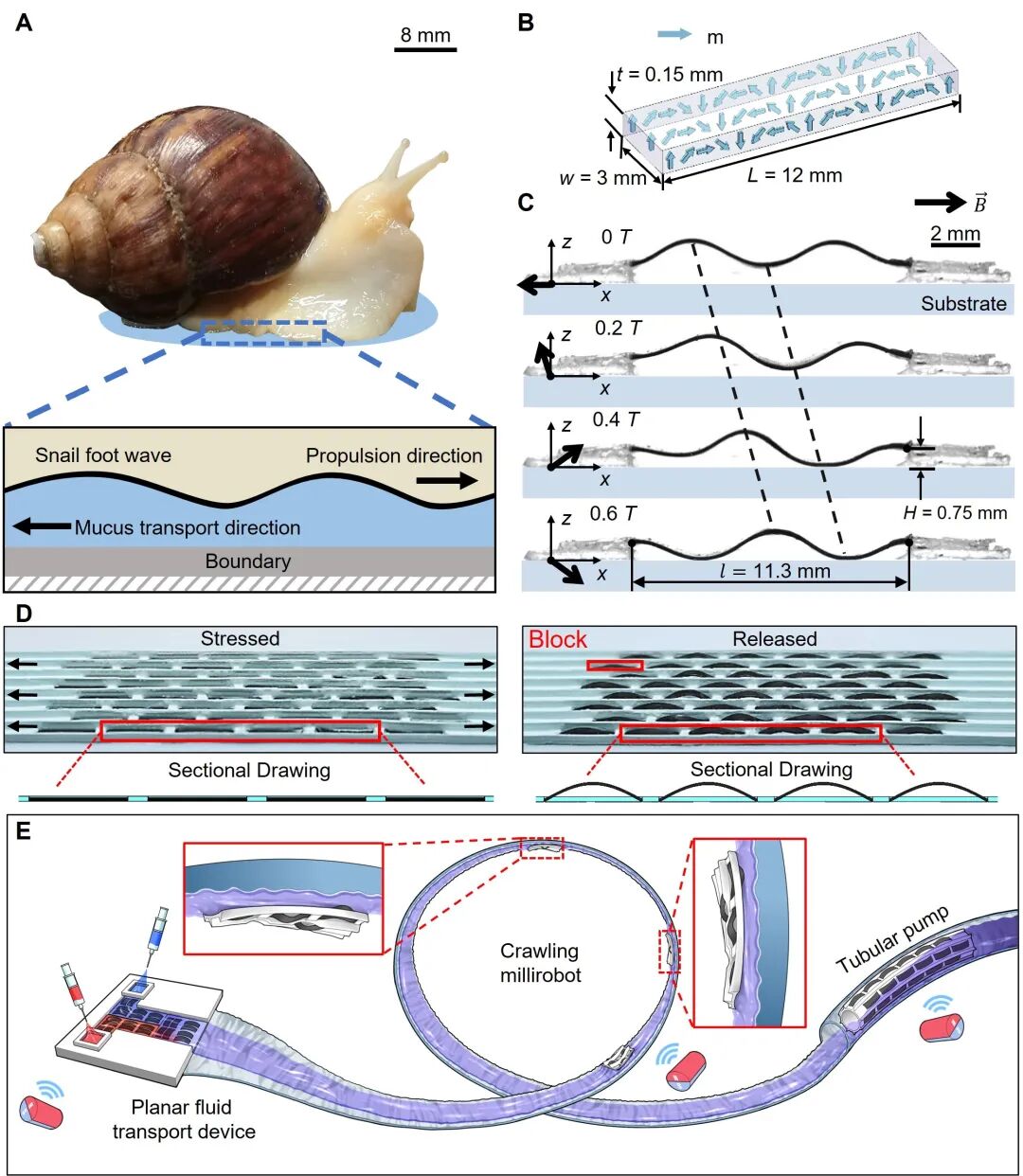
图1. 毫米尺度波浪运动的概念架构、实验实现与潜在应用
结合基于Cosserat杆理论的数值仿真与实验表征,本研究系统分析了几何设计、驱动条件等因素对单个波动单元波形特性(行波振幅A和传播距离d)的影响。结果表明,波动单元的波形特性受磁化周期数、磁片厚度、长度、磁场强度、与基底间隙高度等参数的综合调控。这些发现为探索波动单元的运动性能提供了基础。
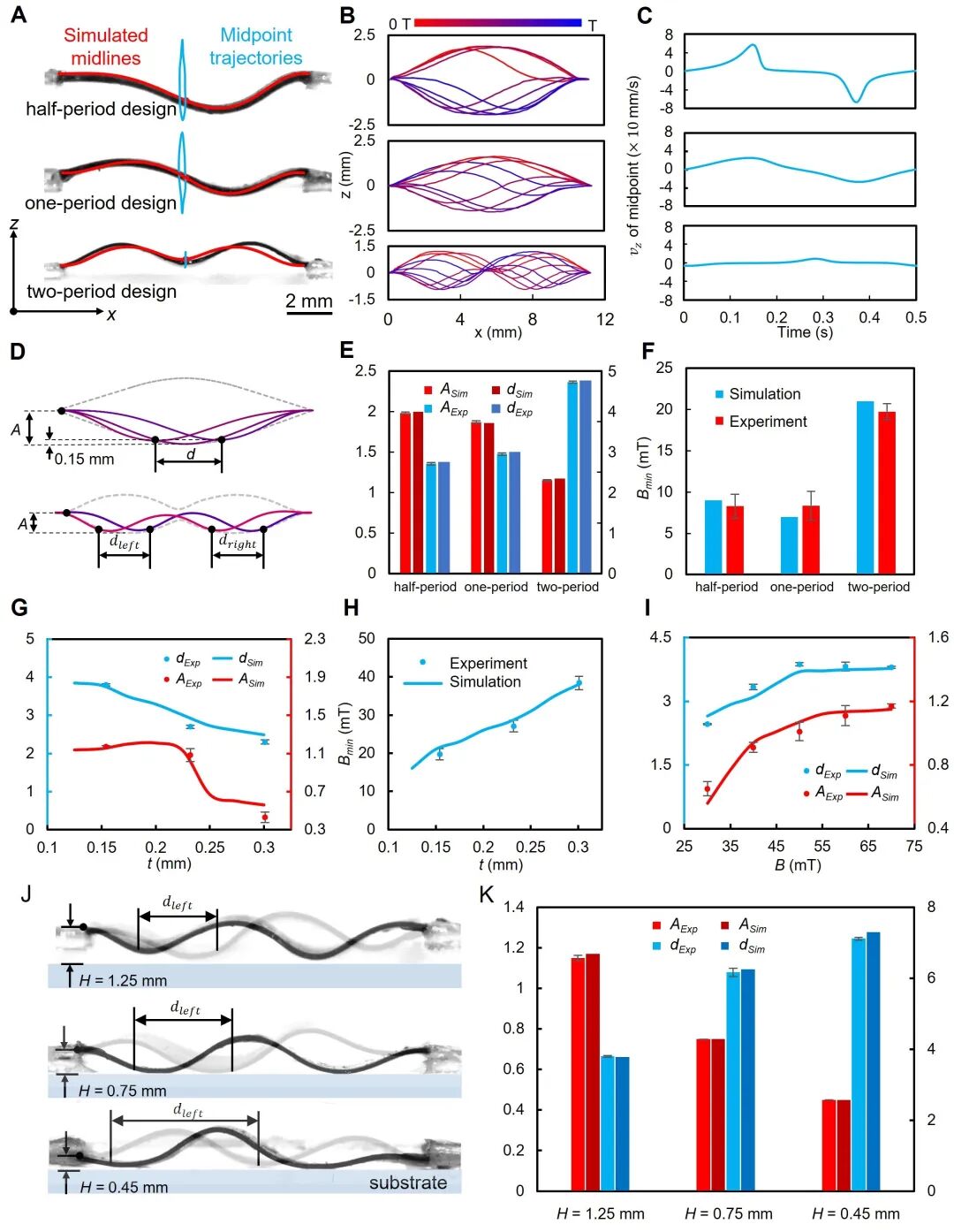
图2. 不同参数下波形特性的表征
随后,本研究探究了波动单元在全浸没与半浸没条件下的近壁流体输运性能。为了观测近壁流场,研究团队采用粒子图像测速(PIV)技术对波动单元周围的流场进行了可视化。一个周期内几个离散时间点的流场图揭示了波动单元驱动的流体输运为一种空间不均匀分布的非稳态脉动流,每个驱动周期被划分为“冲程”与“回程”。尽管具有往复特性,其周期平均流量Q仍为正值,保证了流体的净前向输运。
为了更好地了解不同因素对近壁流体输运性能的影响,本研究建立了一个将Q和A, d, H, f关联的解析模型。该模型揭示了Q与间隙高度H之间的非线性关系,并证明波动单元和基底的合理接触通过平衡A与d,实现了最优输运性能。在半浸没条件下,该波动单元同样表现出稳定的流体输运能力。此外,形成稳定的液桥保证了多个串联波动单元间的连续流体输送。
图3. 波动单元驱动的近壁流体输运特性
贡献二:多个波动单元的群体输运行为及液体混合探究
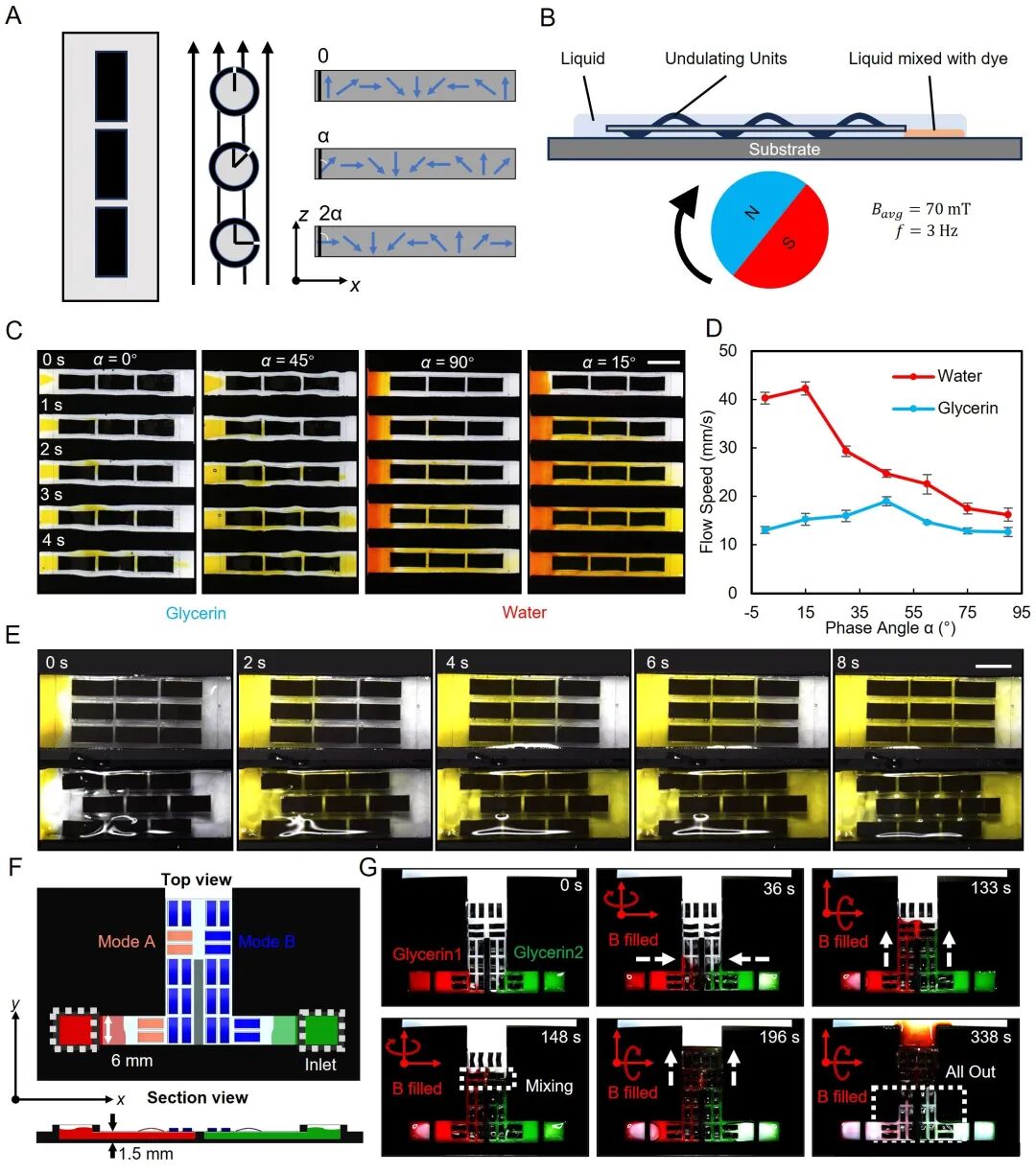
图 4. 波动单元阵列在平面流体操控中的集体行为。
自然界中的生物可通过主动协调其附肢来实现流体输运,例如海星幼虫的纤毛带、龙虾的游泳足,以及多毛类蠕虫的疣足等。受这些生物系统的启发,本研究尝试探究多个波动单元的群体输运性能。实验结果显示,具有不同时间相位差的阵列在输运性能上表现出显著差异。值得注意的是,最优时间相位差依赖于流体粘度,对于甘油,具有45°相位差的波动单元阵列在所有观测中表现出最佳性能,相比90°相位差的配置输运速度提升了高达45.6%。而对于水,最优相位差为15°,相比90°相位差的配置提升了160.4%。
同时,通过多行波动单元间的跨行流体动力耦合可以进一步增强整体流体输运性能。实验结果显示,相邻行之间具有半跨距错位配置的空间相位阵列产生了更高的流速,这证实了合理的空间相位优化同样能提升平面流体输运效率。基于上述发现,本研究通过控制波动单元的模式和朝向开发了一种用于多流体操控的平面流体传输装置,在可控旋转磁场的驱动下,该装置具备同步输运及混合多种流体的能力。
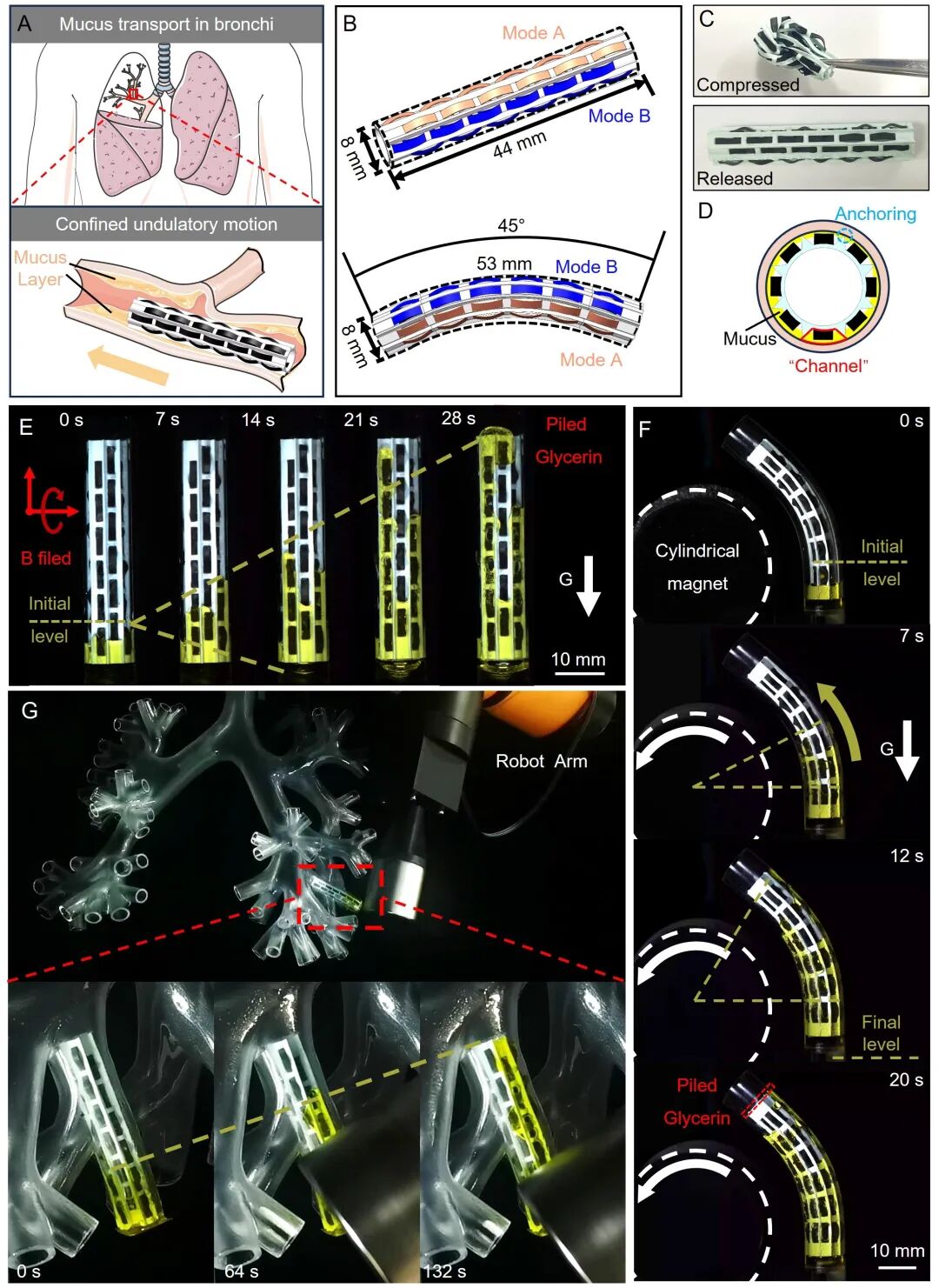
图 5. 3D 管状结构内的近壁流体输运
除了平面流体操控,支撑框架的柔性使波动阵列能够贴合三维表面,自适应不同几何形状与曲率的管状结构。通过在直管、弯管及模拟支气管模型中的实验,本研究成功演示了该微型柔性管状泵驱动粘性流体逆重力输运的能力,证实了其在支气管等管路中进行流体操控的可行性。
贡献三:基于近壁群体波浪运动的粘附移动微型机器人
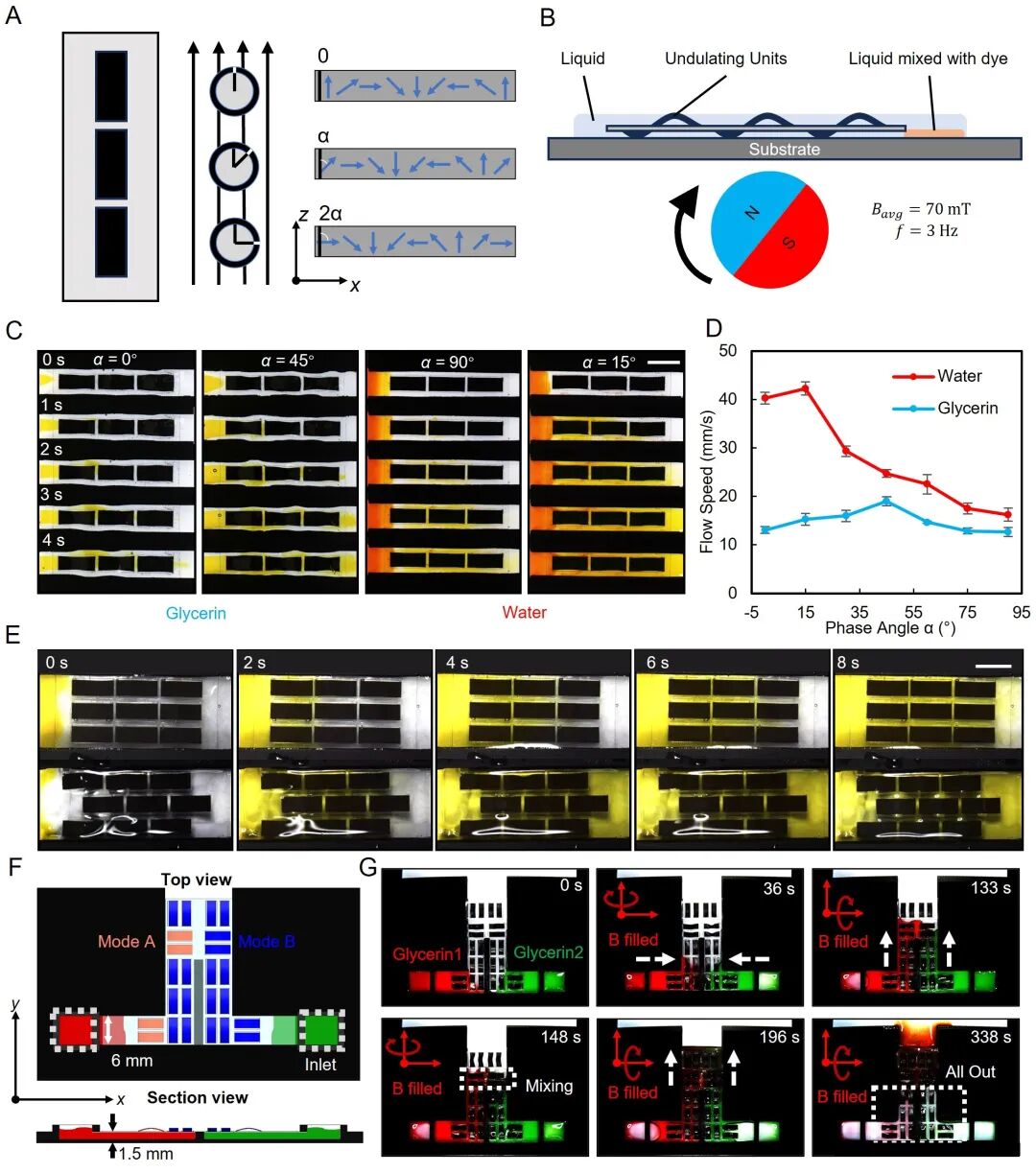
图 6.在覆盖液膜的平面上爬行的毫米级软体机器人。
最后,本研究将波动单元应用于仿蜗牛微型软体爬行机器人。通过协同波浪运动产生逆向波,该机器人能够沿基底向后泵送流体,从而获得前向运动的推进力。此外,表面张力在机器人与基底之间形成液桥以实现粘附,使机器人能够贴合复杂的3D 表面。这种粘附移动模式平衡了移动能力与粘附能力,使机器人在运动过程中能与液膜保持持续接触。
实验结果表明,在涂有甘油的水平、垂直、倒置表面上,机器人均实现了快速、稳定的爬行。该机器人的爬行速度超过了具有类似机制的生物,并在已报道的微型粘附移动机器人中处于领先水平。
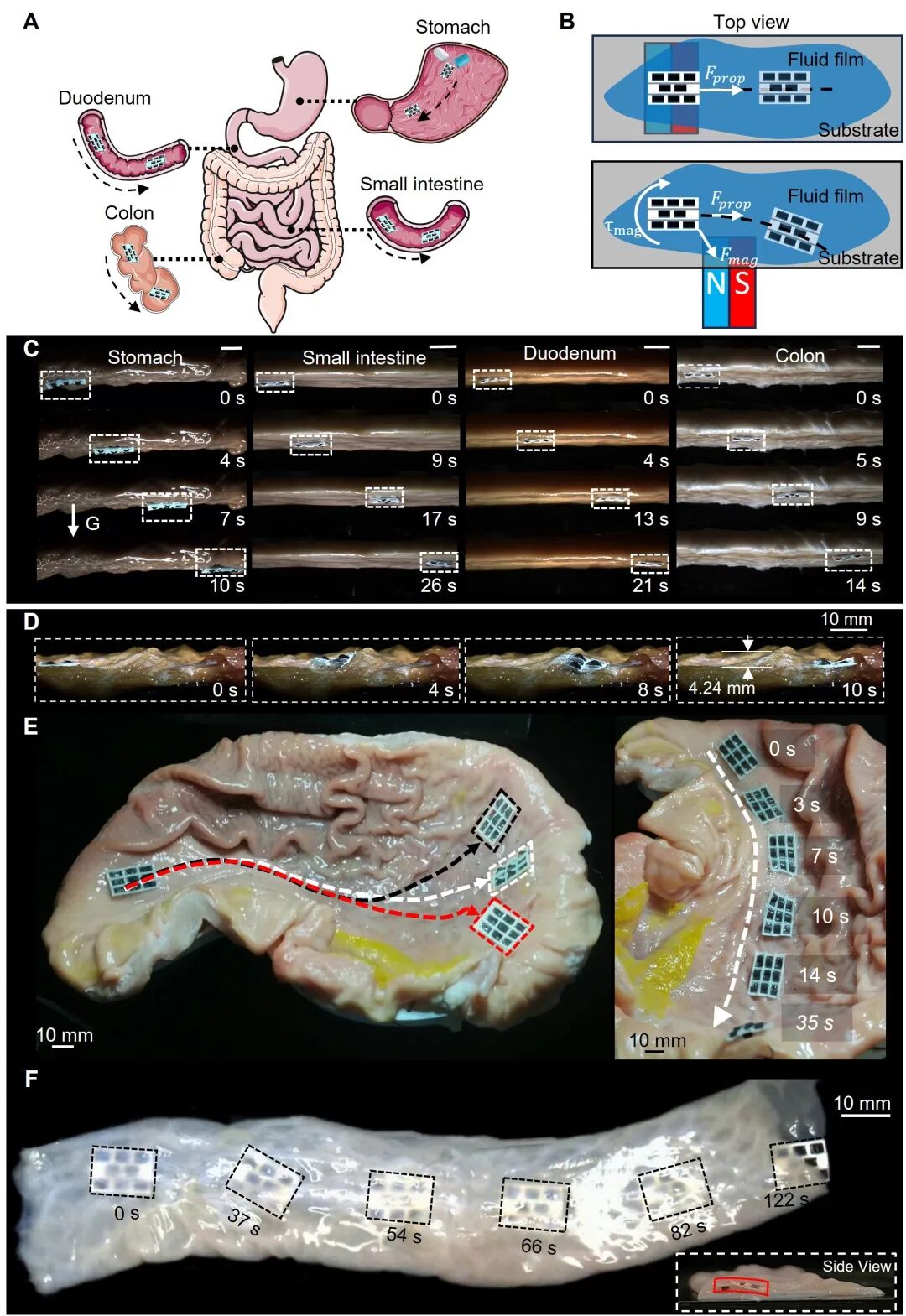
图 7. 软体毫米机器人在离体猪消化道(GI)内的爬行性能
这种具备粘附运动能力的毫米机器人能够沿天然覆盖着粘液层的猪胃肠道组织表面稳定运动。经验证,机器人成功在覆盖粘液的胃、小肠、十二指肠和结肠组织的倒置、不平整表面上爬行,速度分别达到0.5、0.26、0.32和0.44 BL/s。此外,机器人的固有柔性使其能够适应凹凸不平的表面,并跨越4.24 mm的天然褶皱。对于更陡峭的褶皱,机器人可利用其磁控转向能力进行绕行。通过持续调整航向以避开巨大褶皱、选择相对平坦的路径并攀爬倾斜的胃壁,机器人成功到达了三个预定目标点。最后,机器人还成功完成了在一段塌陷的软小肠组织内的爬行验证,尽管受到上下组织表面的机械阻力,机器人仍成功实现了前向运动和可控转向。
03.
总结与展望
粘附运动机制巧妙利用近壁波浪运动,在维持连续界面接触的同时实现推进,从而化解了机器人在附着与运动之间的矛盾。这种摒弃复杂步态与连续吸脱附控制的策略,体现自然界腹足类生物删繁就简的“物理智能”。
人体胃肠道、呼吸道等器官表面广泛存在粘液层,这为基于近壁波浪运动的流体输运与推进机制提供了绝佳的应用场景。未来,该近壁流体输运与推进机制有望为下一代医疗微型机器人的设计提供全新思路,在诸如微型机器人的精准巡检与靶向给药、呼吸道粘液清除,以及医疗导管内壁顽固生物膜的机械剥离等应用中发挥关键作用。
论文pdf下载链接:https://www.science.org/doi/epdf/10.1126/sciadv.aea2598(点击文末左下角“阅读原文”,进入下载页面)
实验室主页:http://softrobotics.buaa.edu.cn/
END

工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 阿童木机器人 | 极智嘉 | 海康机器人
服务与特种机器人企业
亿嘉和 | 晶品特装 | 七腾机器人 | 史河机器人 | 普渡机器人 | 施罗德机器人 | 库犸科技MAMMOTION
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技 | 智身科技 | PNDbotics | 卓益得机器人 | 鹿明机器人 | 擎朗智能| 伽利略GALILEO | 天机智能 | 卧安机器人
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 戴盟机器人| 视比特机器人| 星海图 | 月泉仿生 | 零次方机器人 | 中科深谷 | 智平方 | 大咖机器人 | 灏存科技| 具识智能 | Xynova曦诺未来 | 非夕科技 |未来动力 | 博登智能 | 千诀科技 | 灵生科技 | 集萃智造 | 欣佰特科技 | 晨昏线科技 | Dexmal 原力灵机 | 优理奇
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 水木东方|康诺思腾 | 迪视医疗
上游产业链企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 蓝点触控 | 鑫精诚传感器 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 因克斯 | 巨蟹智能驱动 | 凌云光 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代 | HIT华威科 | 星汇传感 | 凌迪科技 | 泉智博| CubeMars机器人动力