五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库北大团队IJRR顶刊最新成果!刚柔并济,外骨骼不只有力,还懂得如何配合人体

穿上一台膝关节外骨骼,最怕的不是它不够有力,而是它太“强势”。
很多传统外骨骼喜欢把人的膝盖理解成一个机械铰链,大腿一根杆,小腿一根杆,中间一个轴,弯曲、伸直,问题解决。
但人体膝关节不是这么工作的。人在走路、爬坡、下蹲时,膝关节内部并不是固定绕着一个点转动,而是同时伴随着滚动和滑动。股骨和胫骨之间的相对位置不断变化,瞬时旋转中心也会随之移动。
这就带来一个外骨骼领域长期绕不开的问题:机器的轴线,常常对不上人的关节。对不上,就会拉扯。轻则穿戴不适、绑带滑移,重则增加关节负担。外骨骼本来是来帮忙的,最后却可能变成一套限制人体动作的机械框架。
近日,北京大学人工智能研究院周志浩、先进制造与机器人学院王启宁教授团队在机器人领域顶级期刊《The International Journal of Robotics Research》(IJRR)发表最新成果,提出了一种高柔顺、变刚度、运动学兼容的多段式膝关节外骨骼设计方法。

论文第一作者为北京大学王启宁教授团队博士研究生徐明,通讯作者为北京大学周志浩博士,合作者包括北京大学硕士毕业生娄文杰、山东大学博士研究生代孝林、北京大学硕士研究生王润和美国哥伦比亚大学Sunil Agrawal教授。该研究获得了国家自然科学基金项目资助 (No. 524B2044, 52375001, 52475001)。
这项研究要解决的核心问题很直接:如何让外骨骼在提供支撑的同时,尽量减少对人体自然运动的干扰。
01.
刚性外骨骼有力,柔性外骨骼顺滑,但都不够完美
膝关节是人体下肢承重和运动的关键关节。
平地行走时,它要配合髋、踝完成步态转换;上坡时,它要承担更多伸膝负荷;深蹲起立时,它又要在大角度屈伸中提供支撑。一旦力量下降或出现损伤,行走、起立、上下楼梯都会受到直接影响。
因此,如何减轻膝关节负担,一直是下肢外骨骼研究的重要方向。相关技术既可用于康复训练和助老助残,也可服务于工业搬运、负重行走等需要持续减轻下肢负担的场景。
但现有膝关节外骨骼始终面临一个两难选择。
传统刚性外骨骼结构简单、力矩输出直接、承载能力更强,但对人体自然运动的适应能力有限。柔性外骨骼通常采用织物、绑带和绳索驱动,穿戴更贴合,也更容易顺应动作,但结构容易变形,在高负载和精准助力场景中,支撑能力通常不如刚性结构稳定。
因此,膝关节外骨骼需要解决的,不是在“刚”和“柔”之间做取舍,而是如何在顺应人体自然运动的同时,提供足够稳定、可控的支撑。
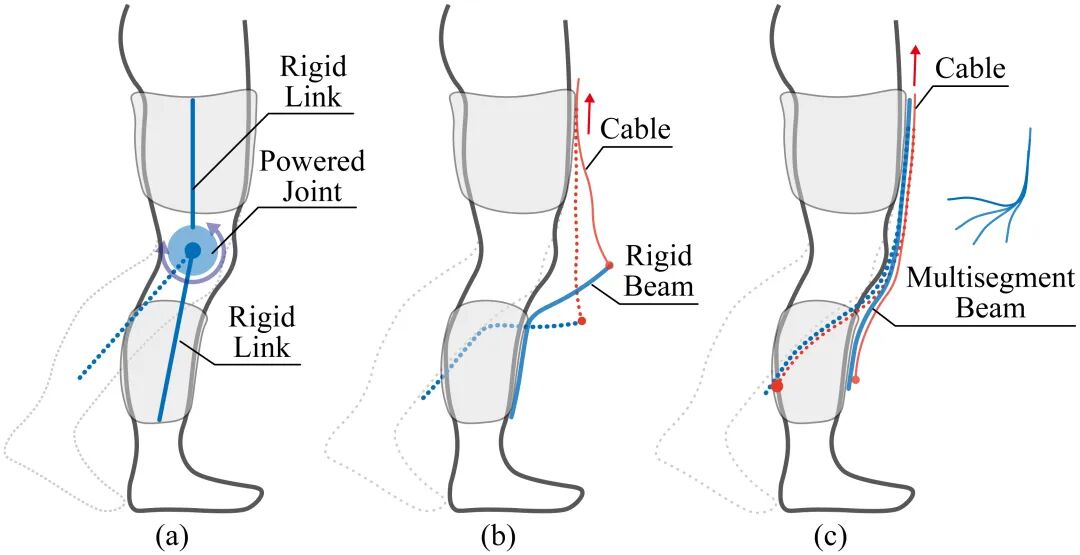
刚性外骨骼、柔性外骨骼及高柔顺变刚度外骨骼
02.
多段式结构:先解决“怎么跟着膝盖走”
这项研究,正是把“运动学兼容”和“变刚度支撑”放进了同一个机械架构里。
研究团队设计了一种绳驱动多段式膝关节外骨骼。它不是用一个固定铰链去强行匹配人体膝盖,而是通过冗余旋转关节和线性导轨,让外骨骼在人体膝关节运动时被动适应自然运动轨迹。
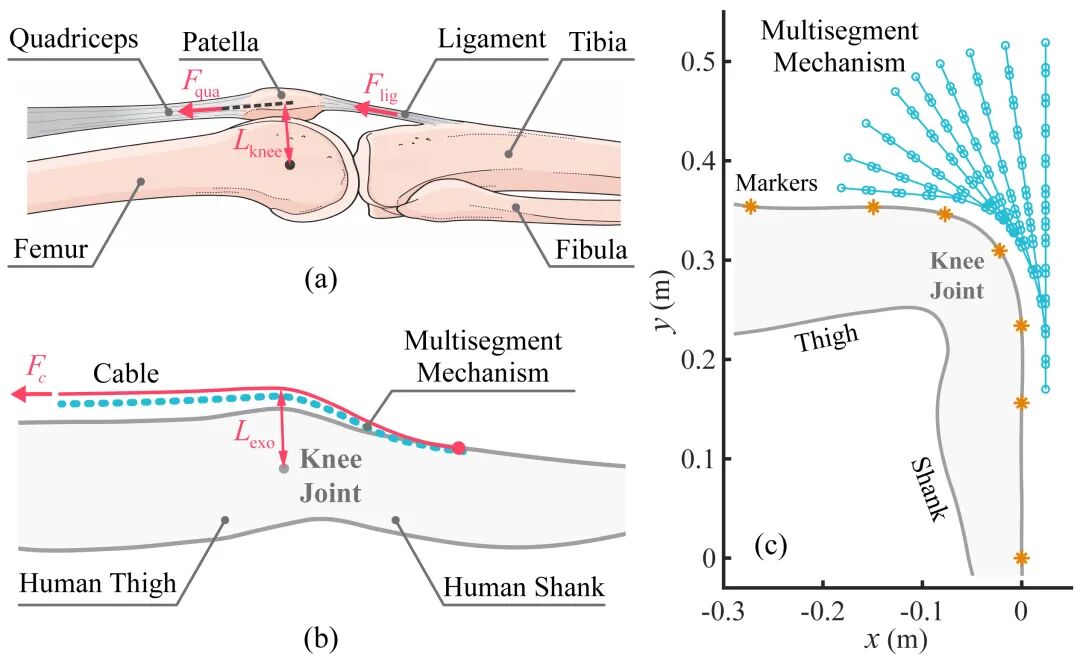
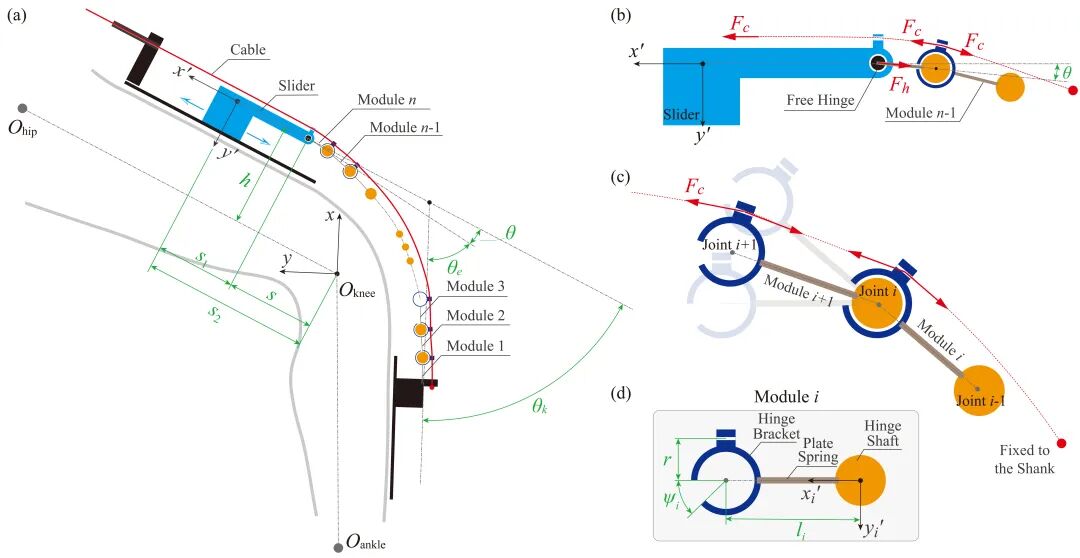
简单理解,传统外骨骼更像是一把硬尺子,它先设定好一条固定运动路径,再要求人体照着这条路径运动。这套多段式结构则给膝关节留出了更多活动空间。人体膝盖在屈伸时发生滚动和滑动,外骨骼也能跟着调整位置,而不是死死卡在一个固定轴线上。
这一步很关键。因为外骨骼只有先做到“不添乱”,后续的助力才有意义。
03.
刚度可变:该支撑时支撑,该跟随时跟随
顺着人体运动,只解决了一半问题。如果一台膝关节外骨骼只能跟着人走,却不能在关键时刻提供支撑,那它更像护具,而不是助力机器人。
膝关节在不同动作阶段,对外骨骼的需求并不一样。
人在站立、上坡、负重和下蹲起立时,需要更强的支撑;腿从后往前摆动时,则更需要轻松、低阻力的跟随。如果外骨骼始终保持高刚度,机器就会拖累自然步态;如果始终很软,又很难真正承担负荷。
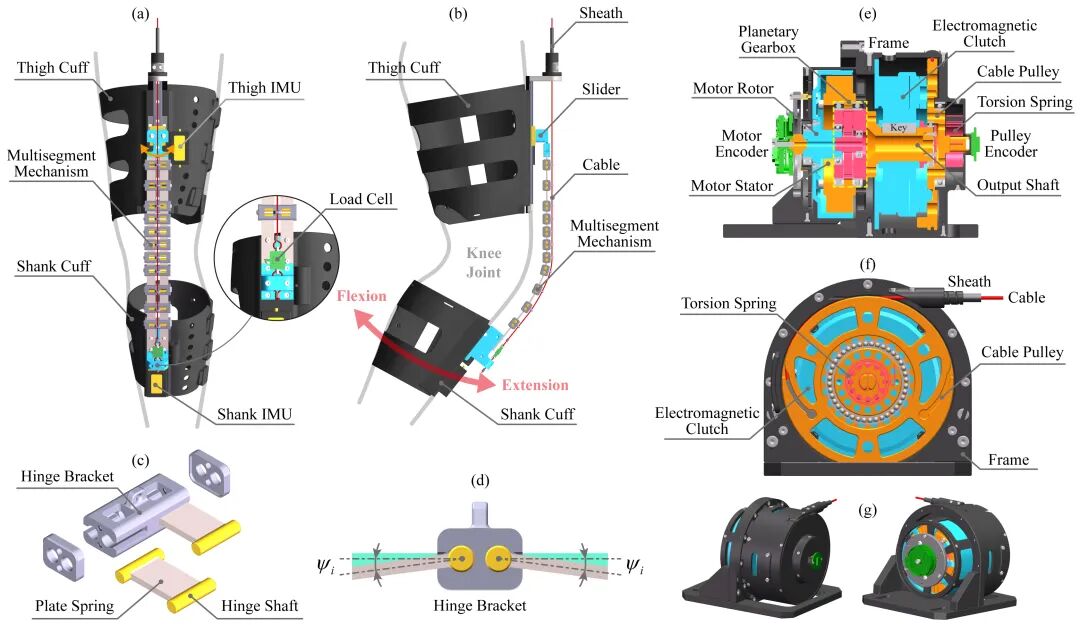
研究团队采用了单执行器绳驱动方案。通过主动调节绳索长度,系统能够改变外骨骼的刚度,同时保持较稳定的力矩传递。其刚度调节范围为0–207 Nm/rad,有效力臂超过 70 mm,单侧外骨骼本体仅重0.63 kg。
这几个数字值得拆开看。
0–207 Nm/rad,说明它不是固定弹簧,而是能在较宽范围内改变支撑特性;0.63 kg,意味着它不是笨重的机械腿,而是尽量控制在轻量化穿戴范围内;有效力臂超过 70 mm,则意味着它在力矩传递上有较好的机械条件。
换句话说,它不是单纯追求“软”,也不是简单追求“硬”,而是试图让外骨骼在不同运动阶段切换力学状态,需要跟随时尽量轻,需要支撑时及时发力。
04.
实验验证:从“不添乱”到真正减负
一台外骨骼到底有没有价值,不能只看结构设计有多巧,也不能只看电机参数有多漂亮。
真正要回答的是三个问题:刚度能不能准确调节?穿上之后会不会干扰自然动作?在高负荷任务里,能不能真正减轻人体负担?
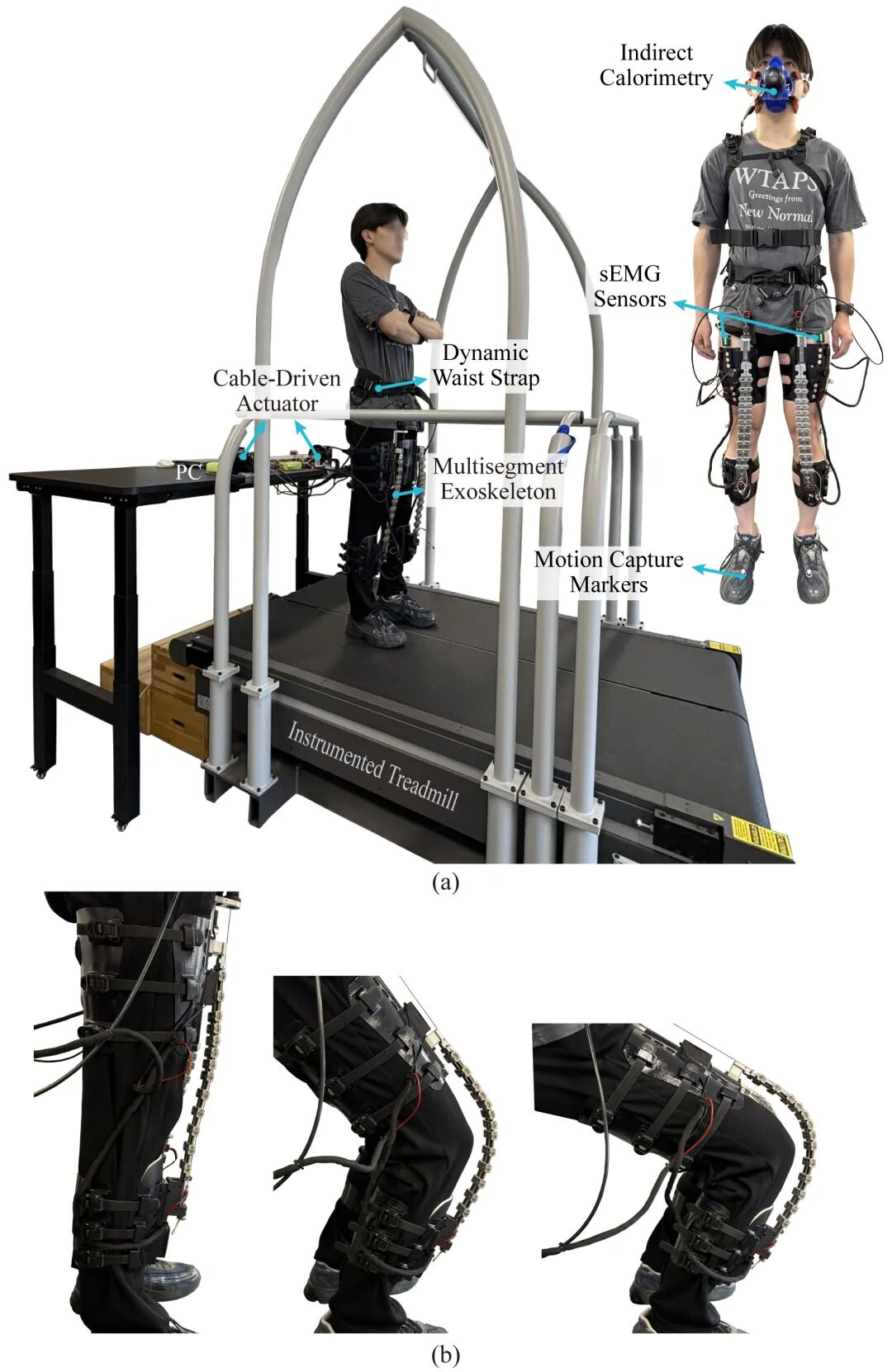
研究团队为此进行了台架测试和人体实验。
第一步,是验证这套变刚度机构本身是否可控。
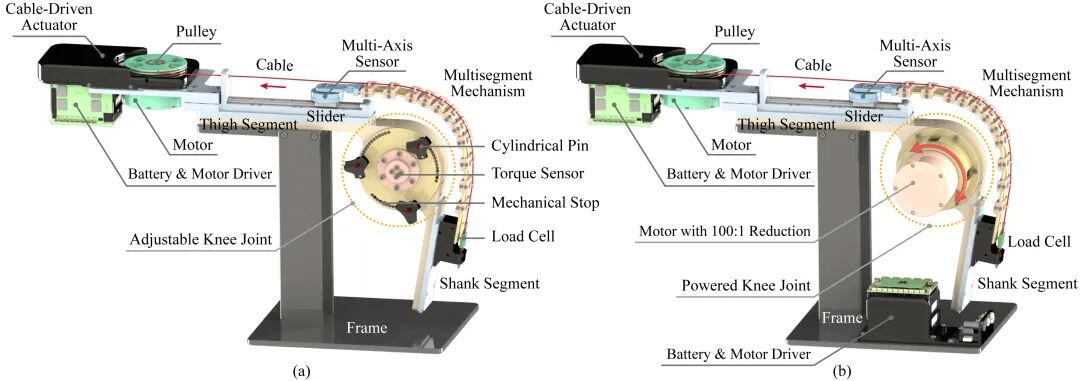
在台架实验中,研究团队对外骨骼的刚度调节能力进行了表征。结果显示,该系统能够在工作范围内实现较精确的刚度控制,刚度控制均方根误差(RMSE)不超过 0.035 Nm/rad。
这说明,它可以通过绳索调节,在不同刚度状态之间实现相对准确的切换。
第二步,是验证它穿在人身上会不会干扰自然运动。
这是膝关节外骨骼最容易翻车的地方。因为一旦机械结构和人体膝关节运动轨迹不匹配,外骨骼输出的就不只是助力,也可能是额外约束。
在运动学相容性测试中,一名受试者分别完成了平地、上坡和下坡行走。结果显示,与不穿外骨骼相比,助力状态下髋、膝、踝关节角度轨迹的平均均方根误差分别在1~2度范围内。
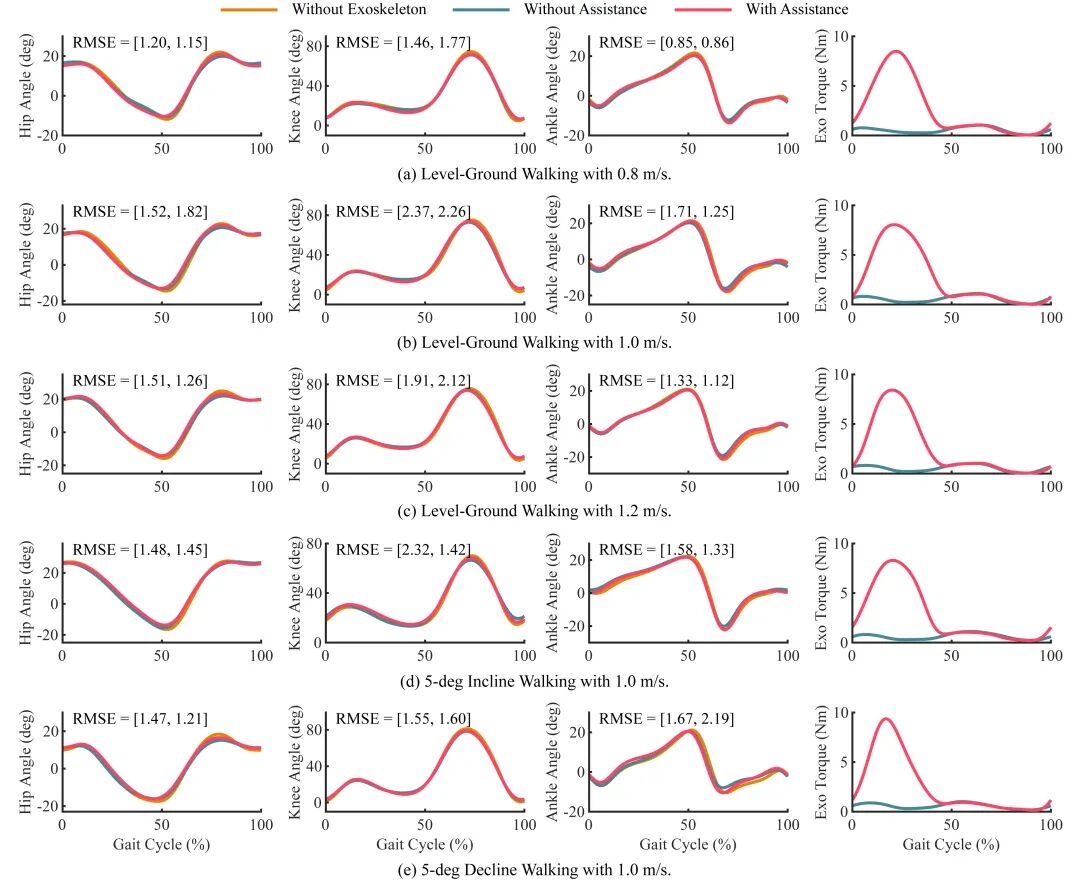
这说明,在测试条件下,外骨骼并没有明显改变人体本来的关节运动模式。
第三步,是看它在高负荷任务里能不能真正减轻人体负担。
研究团队选择了两个对膝关节伸展能力要求较高的任务:5° 坡度下的上坡行走,以及重复深蹲。前者更接近日常移动中的持续负荷,后者则更强调大角度屈伸和短时高负荷支撑。
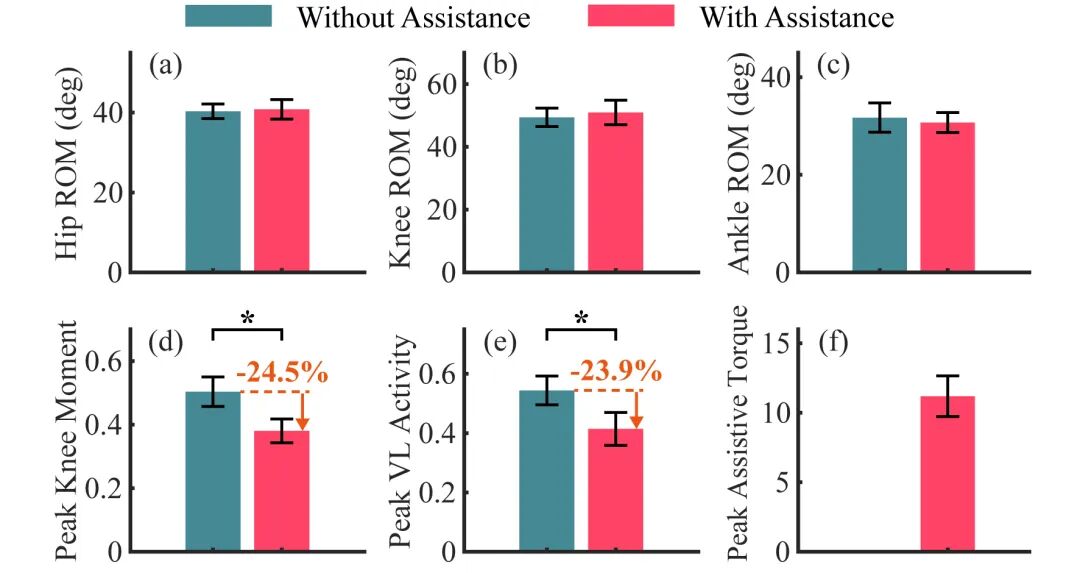
实验结果显示,在上坡行走任务中,穿戴外骨骼并开启助力后,受试者峰值膝关节力矩降低 24.5%,股外侧肌峰值激活水平降低 23.9%,净代谢率降低 13.5%。
在深蹲任务中,外骨骼通过动态刚度调节提供支撑,受试者平均膝关节力矩降低 25.7%,股外侧肌峰值激活水平降低 29.2%。
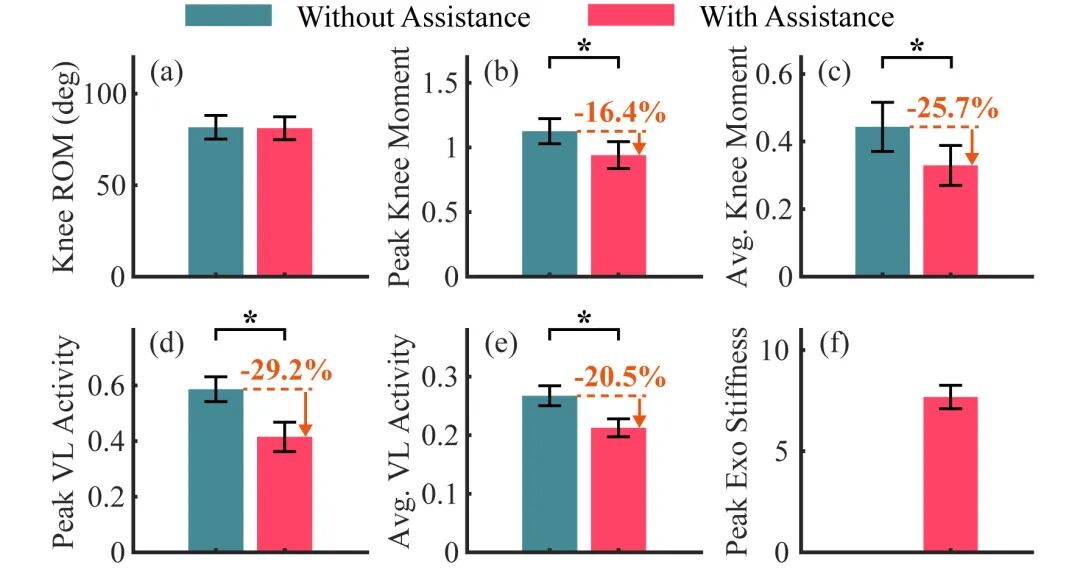
股外侧肌是股四头肌的重要组成部分,也是膝关节伸展时的关键肌肉。它的激活水平下降,意味着人体在完成同类动作时,目标肌群需要付出的力更少。与此同时,膝关节力矩和净代谢率的变化,也说明外骨骼的作用不只体现在肌电信号上,还反映到了关节负担和整体能耗上。
将这几组实验连起来看,这套系统完成了三个层面的验证:刚度能够调节,穿戴后不会明显打乱自然动作,也能在上坡和深蹲任务中减轻人体负担。
当然,这仍是一项论文阶段的研究。目前,人体实验仅覆盖 5 名体型相近的健康男性受试者,运动学相容性测试的样本更为有限;控制策略仍相对基础,模块参数也有进一步优化空间。对于跑步等高速运动,以及不同体型、更多动作和临床人群,仍需要继续验证。
从论文样机走向真正可用的产品,还要进一步回答长期穿戴舒适性、可靠性、成本和安全认证等一系列问题。
05.
下一代外骨骼,要从“能助力”走向“会配合”
过去很多外骨骼的想象,是让人穿上一套机械骨架,获得“钢铁侠”式增强。但真正能日常使用的外骨骼,可能恰恰不是存在感最强的那种。
它应该足够轻,不让人觉得负担;足够顺,不打断人体原本的运动节奏;足够有力,在上坡、下蹲和负重这些真正需要支撑的时刻,替人体分担一部分压力。
这项研究的价值,也正在于此。它没有把膝关节外骨骼简单做成一个更强的外部电机,而是先考虑人体膝关节怎么运动,再决外骨骼应该如何配合,让其在力学上更强,也在人机交互上更克制。
外骨骼的未来,可能不是把人包进机器里。而是让机器在需要的时候,刚好托住人。
论文链接:
https://journals.sagepub.com/doi/full/10.1177/02783649261443651
END

工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 法奥机器人 | 越疆机器人 | 节卡机器人 | 松灵机器人 | 珞石机器人 | 阿童木机器人 | 极智嘉 | 海康机器人
服务与特种机器人企业
亿嘉和 | 晶品特装 | 七腾机器人 | 史河机器人 | 普渡机器人 | 施罗德机器人 | 库犸科技MAMMOTION
人形机器人企业
优必选科技 | 宇树 | 云深处 | 星动纪元 | 伟景机器人 | 逐际动力 | 乐聚机器人 | 大象机器人 | 魔法原子 | 众擎机器人 | 帕西尼感知 | 赛博格机器人 | 数字华夏 | 傅利叶智能 | 天链机器人 | 开普勒人形机器人 | 灵宝CASBOT | 清宝机器人 | 浙江人形机器人创新中心 | 动易科技 | 智身科技 | PNDbotics | 卓益得机器人 | 鹿明机器人 | 擎朗智能| 伽利略GALILEO | 天机智能 | 卧安机器人
具身智能企业
跨维智能 | 银河通用 | 千寻智能 | 灵心巧手 | 睿尔曼智能 | 微亿智造 | 推行科技 | 中科硅纪 | 枢途科技 | 灵巧智能 | 星尘智能 | 穹彻智能 | 方舟无限 | 科大讯飞 | 北京人形机器人创新中心| 国地共建人形机器人创新中心 | 戴盟机器人| 视比特机器人| 星海图 | 月泉仿生 | 零次方机器人 | 中科深谷 | 智平方 | 大咖机器人 | 灏存科技| 具识智能 | Xynova曦诺未来 | 非夕科技 |未来动力 | 博登智能 | 千诀科技 | 灵生科技 | 集萃智造 | 欣佰特科技 | 晨昏线科技 | Dexmal 原力灵机 | 优理奇
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 水木东方|康诺思腾 | 迪视医疗
上游产业链企业
绿的谐波 | 因时机器人 | 坤维科技 | 脉塔智能 | 青瞳视觉 | 本末科技 | 蓝点触控 | 鑫精诚传感器 | BrainCo强脑科技 | 宇立仪器 | 极亚精机 | 思岚科技 | 神源生 | 非普导航科技 | 因克斯 | 巨蟹智能驱动 | 凌云光 元客视界 | 璇玑动力| 意优科技| 瑞源精密 | 灵足时代 | HIT华威科 | 星汇传感 | 凌迪科技 | 泉智博| CubeMars机器人动力