灵巧手:难点和进展!
发布时间:2026-05-31来源:人形机器人洞察研究
温馨提示:扫描文末二维码,加入知识星球,免费下载2800+行业报告(包含海外投行报告);企业广告、推文宣传和研究咨询合作请联系16620948826(同微信)。本文翻译和转载自机器人专家和人工智能研究员Chris Paxton的博客。
原文链接:
https://itcanthink.substack.com/p/robot-hands-are-getting-better?utm_source=share&utm_medium=android&r=3uj5js&triedRedirect=true
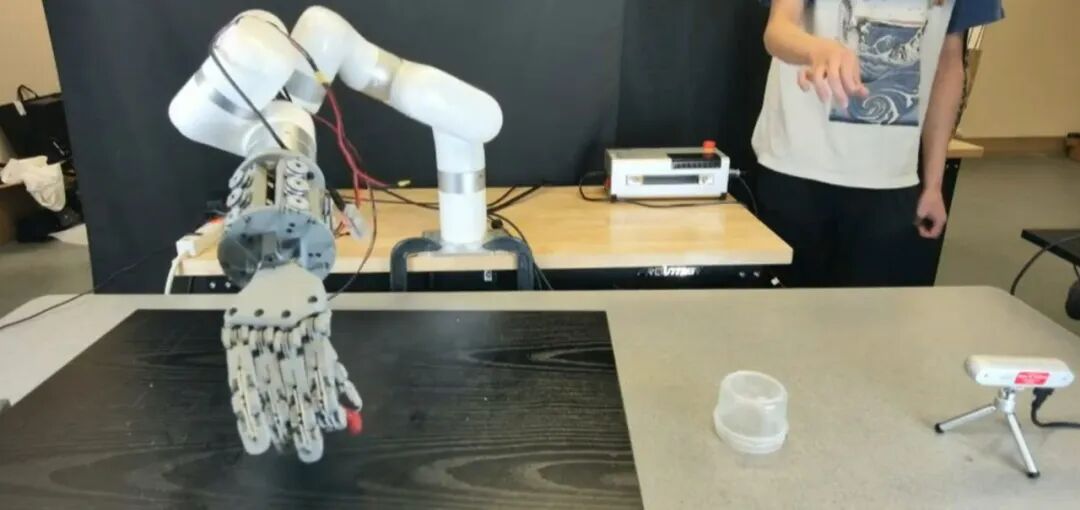
机器人要想发挥作用,就必须能够与外界互动。它们可以通过多种方式实现这一点:例如,在巡检任务中四处行驶并拍照,或者上下楼梯。军用机器人通常通过爆炸与外界互动。但我们越来越希望实用的机器人能够操控周围环境并执行类似人类的任务,这就需要机械臂或机械手。问题在于,人手的能力极其强大——它们本身就是一个很高的标准。人手强壮、轻盈、适应性强,并且具有自我修复能力。人指尖每平方厘米约有2500个触觉感受器,拥有大约22个自由度。它能在施加巨大力量的同时高速移动。因此,制造出能够媲美人类能力的机械手非常困难。但过去几年里,机械手的发展日新月异。你可能已经看过像夏帕机器人公司(Sharpa Robotics)这样的公司展示的令人惊叹的操控演示。夏帕Wave机械手就是新一代机械手的代表,它的能力已经接近人类。现在我们有了像这样的手,售价 600 美元,它足够精准灵巧,可以拿起一颗覆盆子而不会把它弄碎:这项任务意义非凡,原因有几个:覆盆子固然非常小,但它柔软易碎,而且质地柔软。这款名为 CRAFT 的机械手由伊利诺伊大学厄巴纳-香槟分校(UIUC) 和加州大学尔湾分校 (UC Irvine) 的研究人员共同研发,由 Unnat Jain 教授领导。它的价格令人难以置信,仅售 600 美元,而且其设计图纸是开源的。如今,市面上涌现出各种各样的开源机械手,商业产品也日益丰富。那么,我们来聊聊机器人手吧。关键的设计决策是什么?你应该选择哪一款?如何才能理清所有这些信息?最常见的机器人手,例如安装在YAM或ALOHA 机械臂上的那些,只有单一的自由度:开合。正如物理智能所展现的那样,这足以完成极其广泛的任务。显然,我们的机器人并不需要手。当然,没人会去看一个不成功的演示;机器人不会被部署去做那些无法自动化的事情。事实上,很多任务都离不开多根手指:例如,在手中重新调整物体的方向。而且,牢牢抓住细长的物体——甚至操作门把手——都并非易事。虽然在相对可控的工业环境中,简单的双指夹爪的局限性并非问题,而且对于小型、低质量物体的简单抓取和放置任务来说也足够了,但这仅涵盖了我们可能关心的少数任务。我们需要高自由度灵巧手来完成的任务包括:对于真正意义上的通用机器人而言,机器人的手部性能还有很大的提升空间。但这本身就是一个巨大的挑战;坦白说,人手在稳健性、施力能力、传感器密度和灵巧性方面都拥有令人难以置信的综合优势,其自由度甚至可以与整个人形机器人平台相媲美。人手体积小巧、坚固耐用,却能施加巨大的力量,而且几乎每个人都有两只手。因此,人手几乎满足了所有这些条件。相比之下,机器人的手就显得逊色一些。要理解个中缘由,我们需要探讨机器人是如何运作并与世界互动的。现代“人形机器人革命”和四足机器人可扩展性的关键在于准直接驱动(QDD)技术的应用,这项技术由麻省理工学院的迷你猎豹机器人率先提出。这里的准直接驱动通常指的是低传动比的行星齿轮组,它“直接”连接到被驱动的关节上。这样可以在力透明度(施加的力和测量的力之间的等效性)和反向驱动能力(在不施加额外力的情况下向后“推动”关节的能力)之间取得很好的平衡。这两个特性对于机器人手来说至关重要,因为机器人手会不断与物体碰撞,从而时刻承受各种力!这些力很容易造成机器人损坏,因此,一个无法反向驱动且力感知能力差的机器人手很容易在简单的碰撞中被摧毁。问题在于,要让机器人正常工作,所需的大型电机通常无法像安装在四足动物的腿或人形机器人的手臂上那样安装在人手上。因此,为了施加足够的力来牢固地抓取和固定物体,需要更高的齿轮比,这会影响反向驱动能力,并对后续性能产生影响。此外,这些伺服电机还会增加手指的重量,这本身也会导致性能问题,并进一步增加对运动链上游更强大伺服电机的需求。- 肌腱驱动的手,例如 ORCA 手,将电机放置在手指外部,并通过某种肌腱将其连接到关节。
- 像Wuji 和Sharpa这样的市场领导者推出的直驱式机械手,其策略是制造越来越小的电机,使其能够真正安装在手的各个关节中,并使用更高的齿轮比和主动顺应性来实现反向驱动。
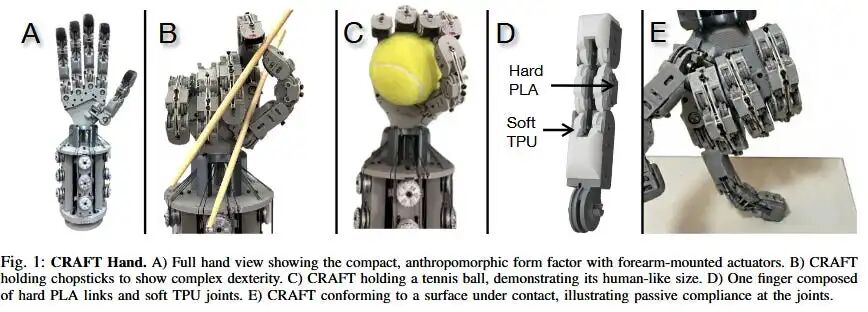
谢泉廷、廖通洲和Yonatan Bisk撰写的这篇名为《灵巧性僵局》的博客文章值得一读,可以更深入地了解这个话题。还有另一个相关的问题。一旦我们开始在小尺寸的装置中集成大量的驱动力,就可能需要做出一些权衡,减少电机的数量。这会减少机械手的主动(受驱动)自由度,但可以降低成本和重量,并缩小尺寸。值得注意的是,即使是人手也存在被动自由度(手指的上关节通常无法独立于其他关节运动)——即使是大自然也难以创造出完美的手。上述驱动问题也可能需要通过全新的技术来解决。例如,Daxo Robotics团队正在尝试研发软体或连续体机器人手,这种机器人手没有刚性连接,因此理论上拥有“无限”的自由度,类似于人类肌肉。目前,这些技术的制造难度较大,但这或许是可以解决的;而且,它们比许多传统机械手更能承受冲击。为了制造出性能接近人类水平的机器人手,我们需要在鲁棒性、强度、成本、重量和灵活性等方面进行大量的权衡,探索非常广阔的设计空间。我看到的大部分研究都集中在肌腱驱动的手上:学术研究人员不像工业机械手制造商那样自行设计电机或制造定制的高精度齿轮。研究人员面临的另一个巨大问题是目前机械手的成本很高:像 Sharpa Wave 这样最好的机械手,每个通常售价超过5万美元,这意味着安装在机器人手臂末端的机械手,其总成本可能会远远超过机器人本身的成本。最近出现了一些致力于开发优质开源机械手的尝试。例如,纽约大学开发的RUKA机械手,这是一款售价低于1300美元的肌腱驱动机械手,拥有6个主动自由度和15个总自由度,可实现柔顺抓握。它比人手略大,自由度也略少,但重量轻,价格也实惠得多。另一个例子是LEAP手(v1 、v2 );v2版本拥有8个自由度,使其能够更好地适应不同的任务,例如可以用于在手中重新调整物体方向。它比人手大得多,尺寸更接近Allegro手,但价格仅约2000美元。高级版本性能更佳,售价3000美元,拥有22个自由度,大致达到人手水平。最近推出的CRAFT机械手在理论上已经接近人类的能力,它拥有15个主动自由度和5个被动自由度,手指轻巧,具有良好的柔顺性和驱动性,售价约为600美元。这是一款3D打印的软硬混合型机械手,其手指关节采用柔软的热塑性聚氨酯材料,旨在确保它能够平滑、稳固地贴合物体并与之接触,同时避免因对物体施加过大力而损坏。还有许多研究人员致力于研发新型机器人手;考虑到这个问题的难度,很高兴看到有这么多开放的、可打印的、可改造的想法涌现出来,推动该领域的发展。截图来自RealHand 的 YouTube 视频当然,现在涌现出一大批机器人手初创公司。本文并非详尽列举所有机器人手,仅列举几个具有代表性的例子,来谈谈过去几年进入该领域的新公司。当然,还有一些更早的机器人手公司,例如Shadow Robot的灵巧手系列——这些也不在本文的讨论范围之内。- Sharpa:总部位于新加坡的 Sharpa 公司目前可能是行业领导者,他们制造的机械手几乎可以媲美人类的能力。他们进行过许多令人印象深刻的演示,其中包括展示其 63 自由度 Sharpa North 机器人使用削皮器削苹果的演示。
- 据路透社报道,灵心巧手公司正在寻求新一轮融资,估值目标为60亿美元。该公司主要以生产机械手而闻名。例如, Linkerbot o6机械手售价约为1500美元,但这款机械手只有6个自由度。
- 强脑科技的 Revo 2 DuraX 手部假肢非常注重耐用性。这款假肢曾多次被演示用于替代截肢肢体,与 Psyonic 假肢类似。虽然 Revo 2 只有六个活动自由度,价格也相对低廉,但 BrainCo 正在朝着更高自由度、价格也更高的方向发展,即将推出的 Revo 3还将集成触觉传感功能。
- Psyonic Ability 手是另一款耐用的手,只有 6 个活动自由度,最初是为假肢设计的,并具有内置压力传感器。
- Inspire 手是一款常用的廉价机器人手,也具有六个主动自由度。
当然还有很多其他的。但目前的趋势很明显是朝着更高的自由度和更高的触觉密度发展,SharpaWave 在原始规格方面与人手非常相似:它每个指尖大约有 1000 个触觉像素和 22 个活动自由度,而人手大约有 21 个(取决于你的计算方式)。- 成本高昂。机械手价格不菲。两只价值 5 万美元的 SharpaWave 机械手或许是市面上最好的,但它们的价格甚至超过了你整个机器人的价格。
- 可靠性。人手能够承受持续不断的冲击并迅速恢复,部分原因是其具有可再生性(覆盖着能够自我修复的皮肤和肌肉)。而机器人手则出了名的脆弱;即使是像上文提到的某些假肢那样非常坚固耐用的手,也无法与人类手的可靠性相媲美。
- 感知。人类双手之所以如此强健,部分原因在于我们更善于运用它们:我们会避免手部受伤,并凭借本能对温度或压力做出快速反应。这得益于密集的触觉传感器网络以及以预防损伤为中心的全身控制机制。
我认为这些问题都不是无法克服的,但都需要付出专门的努力。目前市场上还没有“完美”的机器,这也是为什么这么多研究实验室决定自行研发的原因之一。这篇博文并没有什么实际的教学内容,只是分享一些观察心得。目前有很多公司和研究人员都在努力解决人类灵巧度的问题。现在,就灵巧度和感知能力而言,似乎真的出现了与人类手部大致相当的人造手,尽管在可制造性、强度和耐用性方面可能略有不同。但这些遗留问题终将得到解决。这意义重大;正如我和阿维克·德在最近一篇关于机器人研究性质转变的文章中所写,手部研究人员很快就需要“提升价值链”,摆脱他们目前从事的基础性工作。我认为,在未来的五年内,我们一定能够以几千美元的价格买到性能优良、灵巧、功能强大的机械手,并将其集成到各种机器人和产品中。免责声明
1、我们整理、翻译和转载此文出于传播更多资讯之目的,不代表本号观点,亦不构成任何投资观点,由此做出的投资决策与本人本文无关!2、本文所用的视频、图片、文字如涉及作品版权问题,请第一时间联系小编:16620948826(同微信),我们将立即删除,无任何商业用途!
转载说明:本文系转载内容,版权归原作者及原出处所有。转载目的在于传递更多行业信息,文章观点仅代表原作者本人,与本平台立场无关。若涉及作品版权问题,请原作者或相关权利人及时与本平台联系,我们将在第一时间核实后移除相关内容。
 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库