 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库重载与灵活部署的零和博弈,这家协作机器人企业提出不妥协的打法

加入高工机器人专业行业群,加微信:13590381326,出示名片,仅限机器人及智能制造产业链相关企业。
但传统工业机器人的固定工位设计要么柔性不足,要么改造成本高企。这些需求正在倒逼整个行业加速进化,30kg、40kg乃至50kg、60kg负载的协作机器人陆续面世,切入传统工业机器人统治的禁区。协作机器人与工业机器人在负载性能上的边界,已经逐渐模糊。
在协作机器人发力重载市场的趋势下,遨博以G系列协作机器人作为行业破局者,选择了一条差异化路线:以全关节力矩感知实现“智适应”,以109kg的自重做到40kg的负载。


智适应,重塑协作机器人的工况理解力
当协作机器人进入重载搬运、高精度装配、打磨抛光、焊接等更复杂的工业场景后,面对的已经不再是单一、稳定、可完全预设的标准工况。
在真实产线中,来料可能存在公差波动,夹具可能随着长期使用出现磨损,工件位置可能发生细微偏移,工艺参数也可能随着多品种混线生产而频繁切换。对于协作机器人而言,真正的挑战不只是“按照既定轨迹完成动作”,而是在不断变化的现场条件中,依然保持稳定、精准和柔性的作业能力。
针对以上这些不可预测的多变工况,遨博给出的答案正是“智适应”。
“智适应”本质上是“智能+自适应”的融合,其中自适应强调机器人能够根据外部变化做出调整,而智能强调的是机器人如何更准确地理解工况并主动做出决策。
G系列实现“智适应”的基础,正是全关节的力矩感知。通过在各关节集成高精度扭矩传感器,G系列协作机器人得以实时捕捉力的细微变化,再结合自适应控制算法,自动调节姿态与力度,从而适配更多高精密应用场景。

比如在高扭矩螺丝锁付这样的精密装配场景中,G系列可以实时调整插入姿态与力度,避免过盈损伤,保证一次装配的良率;在机床上下料场景中,系统可智适应来料的偏差,避免卡料、碰撞对工件和夹具造成的损伤;在焊接应用中,关节扭矩传感器搭配末端传感器,然后G系列可以做到实时调整焊枪姿态与路径,确保焊接轨迹的连续性与一致性。
得益于全关节力矩感知,G系列将“智适应”能力延伸到了大负载拖拽示教环节。
通常情况下,负载越大,人工拖动机器人示教的阻力越明显,操作效率也会随之下降。G系列通过实时计算各关节的摩擦力和重力力矩,并结合补偿算法降低大负载下的拖拽负担,使重载协作机器人在示教阶段依然保持较好的灵活性和易用性。
在不需要人机协同或柔顺操作的场景中,系统也可以快速切换至高刚度定位模式,保证机器人在高速、高精度作业中的稳定性与响应速度。
在具体工艺适配上,G系列依托刚度可调的阻抗柔性控制能力,进一步拓展了复杂工况下的精细力控边界。针对装配、打磨、砌垒等不同应用场景,机器人可以根据接触力反馈动态调整阻抗参数,在硬接触与柔顺控制之间平滑切换,实现快速场景适配。
可以看出,“智适应”并非某一项单点功能的突破,而是面向复杂工业场景形成的系统级能力,为G系列完成了从“协作机器人”到“协作应用”的升级。
破局者说:负载与灵活性不再是零和博弈
过去十年,协作机器人凭借“即装即用、安全协作、快速换线”的优势,在对柔性生产要求极高的3C电子、汽车零部件等领域站稳了脚跟。可当协作机器人往重载方向发力时,一个尖锐的矛盾浮出水面:
协作机器人负载越大,自重越大,部署就越笨重,消解了协作机器人最核心的灵活性优势。市面上其他品牌也有进行尝试,但不少产品在追求更高负载的同时,做出了对应的取舍。
比如自重过大,导致产品笨重、部署困难,成本高企,性能平平;底座、尺寸增大,挤占产线空间;需要一体化工作站才能实现最大负载能力,限制了安装方式;工作半径不足,无法匹配大尺寸工件搬运等常见重载应用场景。
早期的重载协作机器人,能在额定负载下稳定运行就已算合格。可当行业竞争进入深水区,“低自重高负载”成为衡量技术实力的新标尺。负载自重比,正在取代单纯的最大负载,成为重载协作机器人最核心的竞争力指标之一。
基于以上行业趋势,遨博选择了将负载自重比做到极致,为协作机器人本体减重的同时,保证其负载能力。G系列的减重并非某一项技术的单点突破,而是依托多年行业经验积累,从设计理念、核心部件到电气系统三大方向做的一次系统性优化。
第一,轻量化必须从设计源头抓起,而不是在已有架构上打补丁。遨博优化了机械臂设计流程,对核心零部件和结构件进行详细的指标化分析与建模,并通过应用优化设计方法,有效减轻了自重。
以负载35kg的G35为例,该协作机器人的自重仅115kg;负载40kg的G40,更是将自重做到了109kg,做到了1:2.73的极限负载自重比,在同级别负载的协作机器人中做到了第一梯队。

第二,减重的前提是性能不打折,拒绝牺牲能力来换取重量。遨博通过深挖关键部件的极限能力,尤其是自产模块的能力上限,在最大化性能释放的同时做到轻量化设计,实现了更大的工作半径和更强的负载能力。
由于工作半径越大,关节承受的力矩越大,容易超出电机和减速器的极限。而遨博通过最大化关键部件的性能释放,实现了G35最大2100mm的工作半径。可以看出掌握核心零部件自产能力的企业,更不容易受到性能边界的限制,能在重量和性能的平衡木上走得更远。
第三,高压平台正在成为重载协作机器人的标配。遨博在G系列上将控制柜电压从48V跃升至96V,为核心零部件的轻量化提供了更高的上限。此外,更高的电压大幅提升了大负载高功率需求下的电源效率,降低热损耗。

在这三大优化工作的叠加效应下,G系列完成了一次成功的减重。对比遨博同为35kg负载的协作机器人iS35,G35自重减少了1/3。配合仅有315mm的底座直径,最长40米柔性线缆的远程部署能力,在同等负载能力的协作机器人中,G系列将部署灵活性推向了一个新的基准。
效率即利润,重载协作机器人的“快”与“稳”
在任何制造场景中,效率都是底层语言。无论是中小型制造企业,还是大型制造工厂,对于投资回报的追求总归会回到效率这个主题上。如果说减重解决的是“能不能灵活部署”的问题,那么速度和效率则回答的是协作机器人在重载场景“能否真正创造价值”的问题。
过去五年,行业的竞争焦点是“能不能做到某个负载”,而未来五年,竞争焦点将转向“在那个负载下能做到多快”。重载协作机器人的速度表现,正在从“加分项”升级为“准入门槛”,这在物流码垛、机床上下料等高频重载场景中尤为突出。
比如随着负载增加,协作机器人机械臂的各轴速度往往会快速降低,从而影响了码垛节拍;在机床上下料场景中,协作机器人若不能匹配机床的加工节拍,会大幅延长机床等待时间,直接拉低整条产线的设备综合效率。
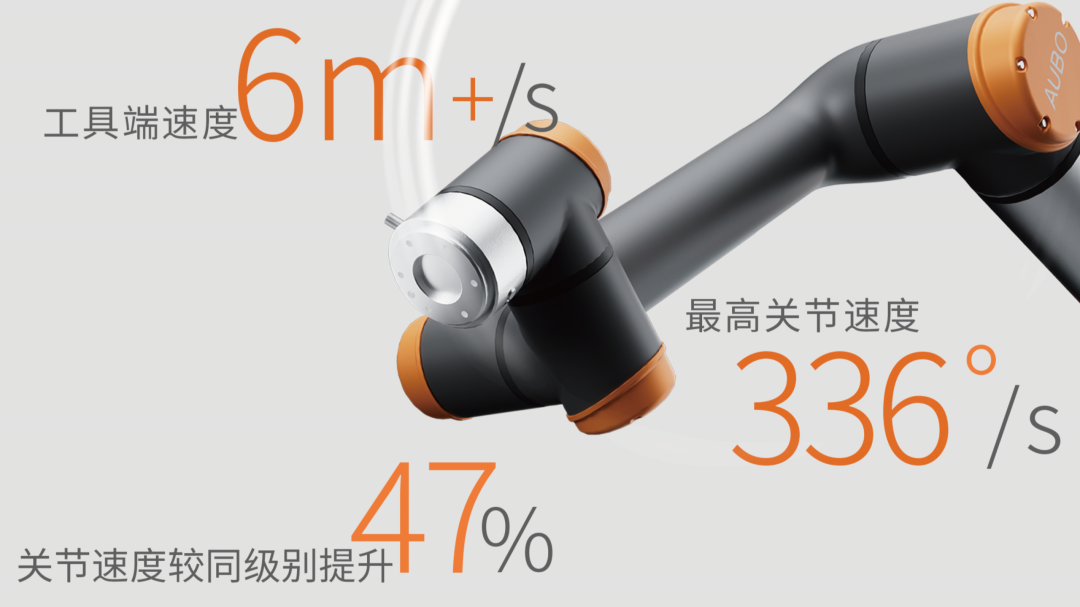
带着对这些行业痛点的理解,遨博在G系列上明确将效率作为设计的重要锚点,实现了336°/s的关节速度和6.4m/s的末端速度,两项指标均处于同级领先水平,使得G系列在分拣、上下料和码垛等场景中可以做到更高的节拍表现。
但大负载下的高速度,从来不是仅靠“加大电机功率”就能解决的。高速启停伴随的是巨大的运动惯量和启停冲击,末端残余振荡会直接影响定位精度、工艺质量和稳定性。与此同时,重载作业下,对协作机器人的安全功能要求更高,比如在检测到危险时,需要做到实时急停。
要想真正做到“快得起,稳得住”,考验的是协作机器人企业从核心零部件、总线协议到控制算法的全链路协同能力。
出于高速实时的考量,遨博选择EtherCAT高速实时总线来实现更高的响应速度和同步精度。G系列以1kHz控制频率实现控制柜与关节的微秒级同步,分布式时钟机制确保多轴精确同步,既让各关节的协同运动指令不会因通信延迟而产生偏差,也确保了在大负载下也能轻松驱动机械臂全速作业。
针对大负载下的过程振动和残余振动,遨博在运控算法上做了深度优化,引入了加速度自适应、振动抑制等控制策略,在重载工况下实现了卓越的振动抑制,在高速启停工况下有效抑制了末端残余振荡,将定位精度控制到微米级。
下一个十年,协作机器人的核心命题
在协作机器人的上一个十年中,行业的核心命题是“证明协作机器人安全、可靠、可以高效投入生产”,20kg负载以下的协作机器人贡献了最大的增长份额。截止到2025年末,遨博以累计交付超过42000台机械臂的成绩,在这一阶段交出了自己的答卷。
而下一个十年的命题已经截然不同,在具身智能之外,高性能应用将成为下一轮大考的核心议题,而30kg以上的重载协作机器人恰好处于爆发前夜。
遨博选择在此时推出G系列,并率先切入35kg和40kg两个负载区间,有着清晰的战略逻辑。30kg到40kg的负载区间,已经覆盖汽车制造、物流码垛等重工场景的大部分需求,也是验证“重载+灵活”技术路线可行性的最佳试验田。
遨博在为G系列命名的理念中,G代表的是Genius & Next Generation,是遨博对下一代协作机器人的思考答卷,成功构建这样一个可扩展的技术平台,就是遨博在第二个十年落下的第一笔。


百万台交付的谐波减速器厂商,冲击港股IPO
翼菲科技首发1000+组合轮式人形ODM底盘,让具身企业免于“重复造轮子”






