五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库蟑螂也有“心里话”?赛博格蟑螂迎来感知驱动新时代

不再强行遥控,而是用心倾听——日本大阪大学团队让新型赛博格蟑螂真正实现了人“虫”协作!
在灾难废墟中搜寻生命、在狭窄管道中检测泄漏、在危险环境中感知未知……这些任务对传统机器人来说依然困难重重,却可能成为“机器昆虫”的用武之地。然而,过去十几年里,科学家们对“半生物半机械式昆虫”的控制方式,本质上与遥控玩具差别不大:人类或AI发出指令,昆虫被动执行。这种单向“指挥”不仅效率低下,还忽视了昆虫作为生命体的自主感受。
最近,来自日本大阪大学及国际团队的一组研究人员,又找到一种新的方式,来支配马达加斯加蟑螂。他们让AI学会“听懂”蟑螂的心跳和神经信号,从而在“尊重”蟑螂自身状态和意愿的前提下,更智能、更温柔地引导它完成任务,这标志着人与生物、机器之间的合作从单向命令走向了双向对话。
从“控制”到“倾听”
“昆虫是活生生的生命,它们的反应因个体而异,也时刻变化。”研究人员指出,“传统的机器人研究往往采取单向方式——给动物下达命令。而在这项研究中,我们迈出了迈向‘响应动物状态’的生物混合控制的第一步。关键转变在于:从‘控制’变为‘倾听’。”
这一理念催生了一个全新的概念——昆虫协同回路(Insect Synergy Circuit,ISC)。“Synergy”强调了生物智能与人工智能的结合,着重于合作而非取代。在这个系统中,昆虫贡献其亿万年进化而来的高效感知、神经处理和运动能力;AI则负责分析数据、判断昆虫的内部状态,并只在最恰当的时机给予轻柔引导。
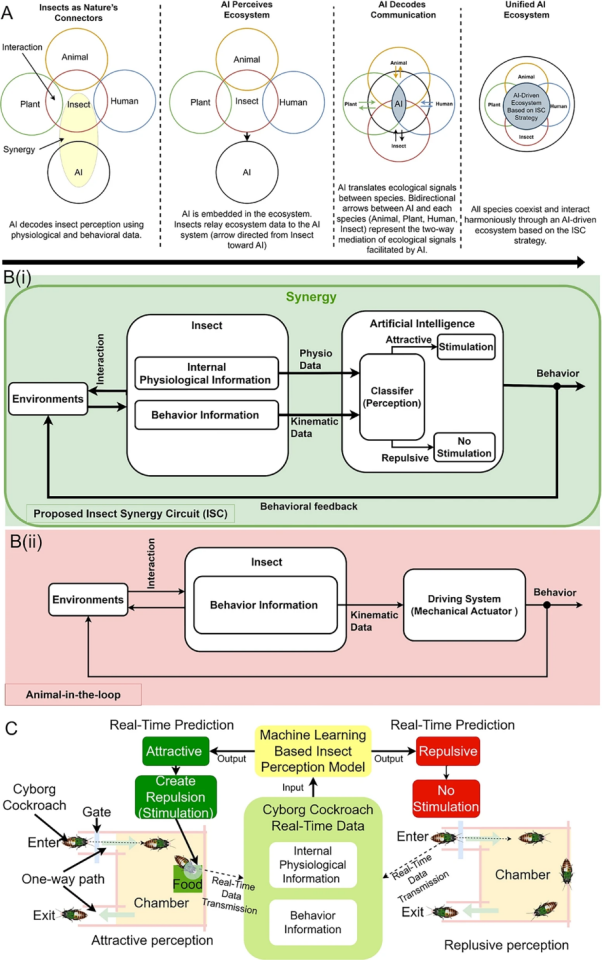
昆虫协同回路(ISC)的概念策略与实现。
A ISC:昆虫充当动物、植物和人类之间的天然连接体;AI通过昆虫中继的数据感知生态系统;AI通过双向媒介作用解码物种间沟通;所有物种在一个统一的AI驱动生态系统中共存。
B (i) ISC架构闭环。昆虫的生理和行为数据(生理与运动学数据)被发送至一个AI分类器,该分类器输出吸引、排斥或无刺激。这种刺激改变共享环境,昆虫通过其持续互动感知到这种改变,从而闭合协同回路(行为反馈)。因此,协同源于环境介导的耦合,而非直接信号传递。
B (ii) 早期的生物混合控制范式——“动物在环架构(animal-in-the-loop architecture)”中,其中昆虫的运动学数据驱动机器执行器,但没有内部感知模型来闭合回路。
C 使用机器蟑螂进行实时验证。一个机器学习感知模型根据实时生理和行为数据对昆虫状态进行分类:吸引分类触发刺激以阻断食物获取,而排斥分类则抑制刺激。
其中,昆虫的行为可以简化为两类:趋近(吸引相关:找食物、同伴、庇护所)和回避(躲避危险、天敌)。这两类行为背后对应着不同的内部生理/神经状态。因此,通过测量生理信号,就可以“读懂”昆虫当前是偏向趋近还是回避,从而做出更合理的引导决策。
一个读懂“虫心”的智能背包
为了实现“读懂”,研究团队为马达加斯加发声蟑螂量身定制了一套可穿戴“背包”。这套微型设备虽然体积小巧,功能却十分强大:
生理传感器:实时记录蟑螂的心跳活动、低频神经信号特征
运动传感器:通过惯性测量单元捕捉身体的每一个细微动作
刺激装置:利用紫外光引导转向(蟑螂天生回避紫外光),利用振动刺激促进前进
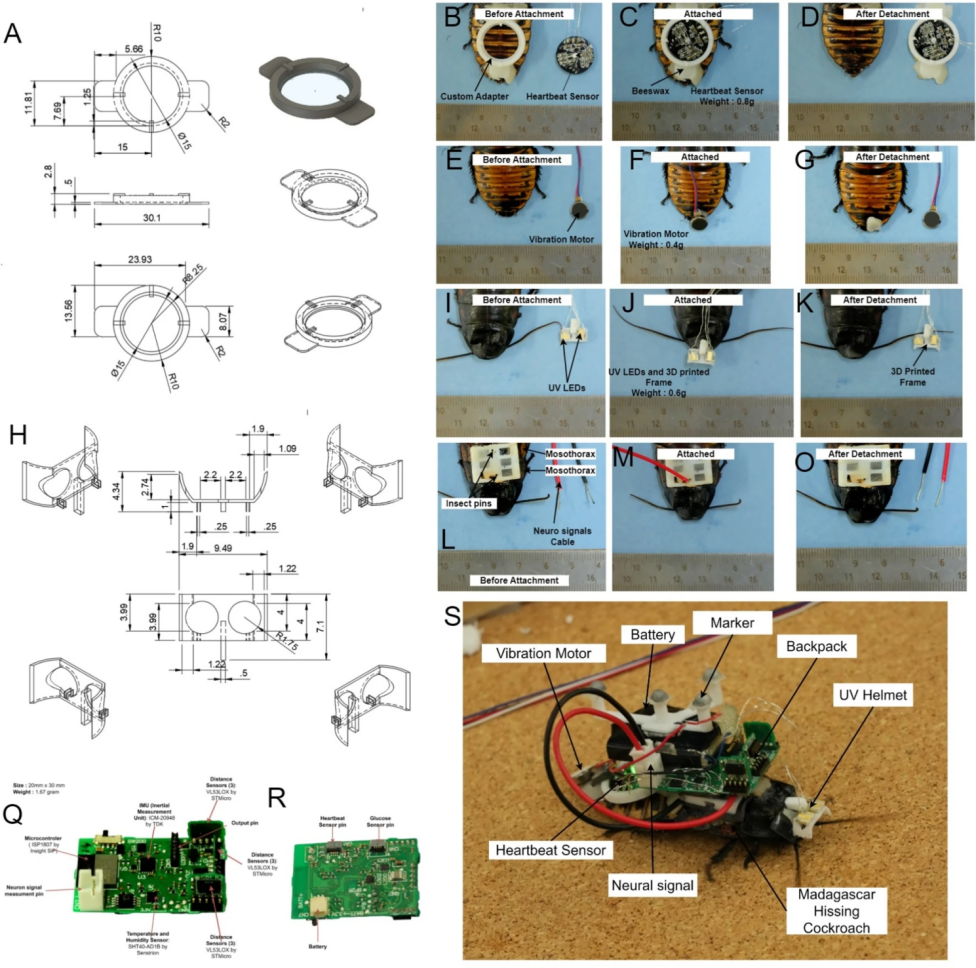
生物智能机器昆虫(bio-intelligent cyborg insect,BCI)的开发与实现。
A心跳传感器适配器的3D示意图。
B–D 光学心跳传感器的安装与拆卸。
E–G 尾须(蟑螂腹部末端的一对感觉器官,对振动和气流敏感)附近用于偏向前进运动的振动马达的安装与拆卸。
H用于在复眼上安装紫外光(UV-A,395 nm)LED的3D打印框架设计。
I–K 紫外光刺激装置的安装与拆卸方式。
L–O 神经信号采集装置,展示插入中胸体节的昆虫针式电极,以及用于记录的神经信号线缆。
Q–R 集成了神经、生理和惯性传感器的定制无线背包。
S 最终成品:所有组件(心跳传感器、振动马达、UV-LED、神经电极、无线背包)同时安装在一只马达加斯加发声蟑螂身上。
与以往研究不同,这套系统不依赖预设的刺激规则,而是将实时采集到的多模态数据——心跳、神经电信号、运动轨迹——全部送入一个机器学习模型。该模型经过训练后,能够以高达93%的准确率判断出蟑螂当前处于五种环境状态中的哪一种:自然状态、紫外光刺激、化学物质暴露、高温环境,还是发现了食物。
换句话说,AI能够“读懂”这只小虫子此刻是感到舒适、被食物吸引,还是因为化学刺激而感到不适想要逃离。
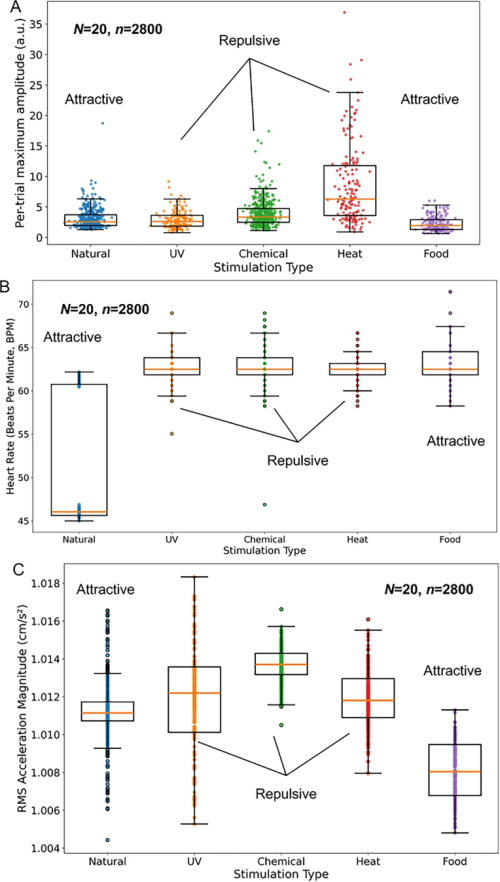
不同刺激条件下内部感知特征的比较分析(N = 20只昆虫,n = 2800次试验)。
A 在自然、紫外光、化学物质、高温和食物条件下,每次试验的最大低频神经振幅特征的分布。
B 不同刺激条件下以每分钟心跳次数为单位的心率。
C 不同刺激条件下的均方根加速度幅值。箱线图表示中位数和四分位距,并叠加了各个数据点。
感知驱动,进退有度
研究团队设计了一个复杂的多室迷宫,其中包含吸引性区域(放置食物)和回避性区域(模拟化学或高温危险)。在自然状态下,普通蟑螂会一直赖在食物室里,根本不会完成全程穿越。
但当启用基于“昆虫协同回路”的闭环控制策略后,奇迹发生了:部分机器蟑螂成功穿过了整个迷宫。这套策略的聪明之处在于——不滥用刺激,懂得“放手”。
当AI推断蟑螂处于趋近或平静状态(例如感知到食物)时,它会施加引导刺激,帮助蟑螂朝着目标方向前进。
当AI推断蟑螂处于回避相关状态(例如感知到化学刺激或高温)时,它会自动关闭刺激,让蟑螂依靠自身行为去躲避“危险”,而不是强行与昆虫的本能对抗。
这种“能进能退”的智能控制,大大减少了不必要的干预,也避免了传统方法中反复刺激导致昆虫应激或疲劳的问题。更重要的是,它真正实现了以昆虫的内部感受为决策依据——这意味着生物混合系统从“基于行为的控制”迈入了“基于内部状态的控制”的新时代。
为什么选择蟑螂?
也许有人会问:为什么要跟蟑螂合作?
事实上,蟑螂是地球上最成功的生物类群之一。它们的存在历史比恐龙还要悠久。在漫长的演化中,蟑螂发展出了极其高效的感觉运动系统:与人类依赖大脑的集中式控制不同,蟑螂采用分布式神经控制——胸神经节可以在大脑极少参与的情况下,独立协调腿部和翅膀的运动。这使得它们反应极快、能耗极低,能在复杂恶劣的环境中生存繁衍。
正因为如此,蟑螂本身就是一台近乎完美的“运动平台”和“环境探测器”。与其费尽心思用人工传感器去模仿,不如直接“借用”它们的天然能力,再辅以AI的智能调度。这正是生物混合机器人的核心逻辑。
AI与自然的新关系
这项研究的意义远不止于让蟑螂听话。研究人员描绘了一个更宏大的愿景:首先,AI通过观察昆虫来帮助人类理解生态系统;接着,昆虫作为活体传感器向人类提供环境信息;然后,AI协助解读不同物种之间的信号;最终,植物、动物(包括人类和昆虫)通过一个共享的技术系统连接起来,在整个生态系统中实现沟通与协作。
然而,必须承认,当前基于昆虫协同回路(ISC)的系统仍处于原理验证阶段,距离上述愿景尚有较大差距。核心挑战主要集中在五个方面:第一,个体差异导致实时控制准确率从实验室的93%下降到65%左右;第二,实验环境仍限于规整的迷宫,未能反映真实自然环境的复杂性;第三,目前可用的刺激手段仅有紫外光和振动两种,较为单一;第四,受限于背包功耗与重量,采集的神经信号较为粗糙,难以捕捉快速神经事件;第五,系统完全依赖内部生理测量,缺乏外部环境感知的融合。
面对这些局限,研究团队明确指出:“这不是结论,而是开始。”未来的研究方向正是针对上述挑战逐一突破:开发能够在线学习、自适应个体差异的智能算法;在更复杂、非结构化的真实环境中测试系统性能;扩展多模态刺激工具,如气味引导或温和热刺激;研制更低功耗、更高分辨率的神经传感设备;并尝试集成微型外部传感器,实现内外信息的融合感知。
可以想象,当这些技术逐步成熟后,蜜蜂可携带微型设备监测农田污染,甲虫能深入废墟定位受困者,飞蛾可飞入管道检测有毒气体……它们不再是单纯的“工具”,而是有感知、有自主能力的合作伙伴,真正实现人与自然的智能协同。
更低功耗,更自然协作
值得一提的是,这项研究在技术路径上特别强调低功耗。用于估算内部感知状态的特征——低频神经振幅、心跳、IMU数据——都是计算量较小的信号类型。这意味着未来可以设计出能耗极低、续航极长的可穿戴设备,让机器昆虫真正走向实际应用。
此外,非侵入式的紫外光刺激也比传统的电击或热刺激更加温和,对昆虫的损伤更小,更符合动物伦理的要求。研究团队引用德国生物学家雅各布·冯·乌克斯库尔的“环境世界理论”作为概念起点:每一个生物体都生活在自己独特的感知世界中,而内部生理信号正是它与环境互动的“密码”。通过AI解读这些密码,我们第一次有希望打破物种间的沟通壁垒。
也许有一天,当第一只“会倾听”的赛博格蟑螂在震后废墟中发现生还者时,它会轻轻地发出信号,而不是盲目地挣扎——因为AI早已明白,它此刻的心跳,不是在抗拒,而是在告诉人类:我闻到了生命的气息。
文章来源:Chowdhury Mohammad Masum Refat et al, Perception-driven control strategy for bio-intelligent cyborg insect, ROBOMECH Journal (2026). DOI: 10.1186/s40648-026-00344-7.

商务合作
商务活动|宣传推广|转载开白等
邮箱|1784288990@qq.com
联系电话|18355423366
END
“
如果内容对您有所启发,欢迎在评论区留言
请点赞、转发、小心心,将公众号设置为星标
”