 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库有了机器人,手术学习曲线会更短吗?

关注手术机器人发展的临床医生与医院管理者 手术机器人及核心零部件企业从业者 医疗科技投资人、行业研究人员
拆解手术机器人常见误解背后的真实技术与临床逻辑 从工程 + 手术流程角度理解机器人真正改变的是什么 建立对手术机器人长期价值与发展边界的理性认知
MedRobot
一、为什么机器人看起来“更容易学”?
从表层体验看,机器人系统带来几个明显改变:
✔ 视野更稳定、放大更清晰
✔ 器械抖动被系统过滤
✔ 操作姿态更符合人体工学
✔ 部分动作有路径辅助或限制这些因素让初学者在早期阶段更容易完成基础操作,挫败感也相对较低。
但这只是学习曲线的“起点阶段”。
二、学习难度并没有消失,而是发生了转移
当手术进入更复杂阶段,机器人带来的新挑战开始显现,而且这种挑战在不同类型机器人上体现得非常具体。
1️⃣ 对空间理解能力的要求更高
在腹腔镜手术机器人中:
医生面对的是经过放大、重构的三维视野,但深度感知、组织层次判断、器械相对位置关系,都需要通过视觉信息主动建立空间模型。
传统手术中依赖触觉确认的组织张力、牵拉强度,现在更多要通过影像细节和器械运动反馈来判断。
在骨科手术机器人中:
医生需要在术前影像、三维重建模型和术中实际解剖之间建立精确对应关系。
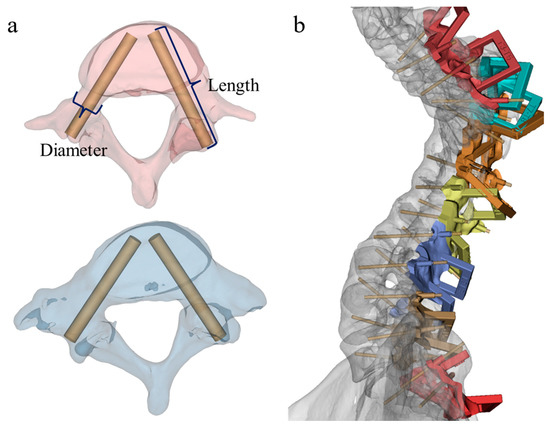
例如在螺钉置入路径规划中,医生不再只是“看见骨面”,而是要在数字模型坐标系中理解空间结构,这是一种新的空间认知方式。
2️⃣ 对流程控制能力的要求提高
机器人手术往往不只是“多了一双机械手”,而是多了一整套流程环节。
腹腔镜机器人手术中:
从患者体位摆放、套管位置设计、机械臂对接、系统校准,到术中器械更换与视野切换,步骤比传统腹腔镜更复杂。
手术顺利与否,很大程度取决于术者对流程节奏的整体把控,而不只是单次操作技巧。
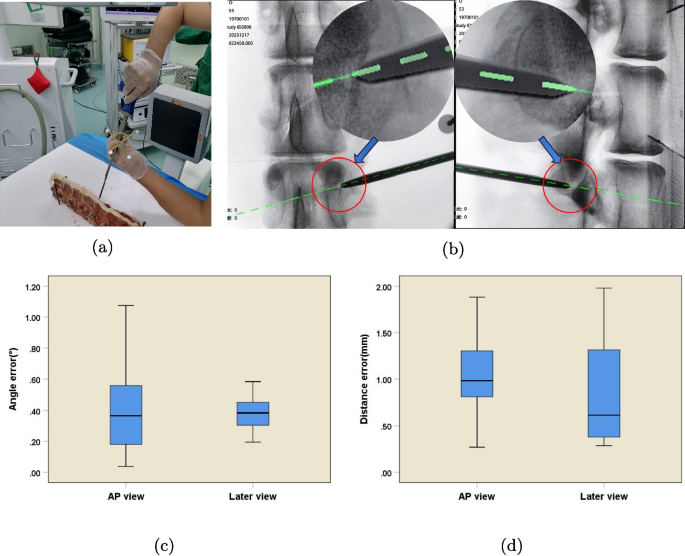
骨科机器人手术中:
术前规划、注册配准、术中定位验证,每一步都是流程节点。
一旦某个步骤偏差未被及时识别,后续操作都可能受到影响。因此医生需要具备更强的系统流程意识,而不是只关注操作本身。
3️⃣ 对系统异常的应对能力
传统手术中,大多数问题来自解剖或出血等临床因素;
在机器人手术中,还新增了一个维度:系统状态管理。
腹腔镜机器人场景下:
视野异常、器械响应延迟、系统报警等情况,都需要医生迅速判断是技术问题还是临床问题,并决定是否继续、调整还是转换方式。
骨科机器人场景下:
配准误差、定位漂移、路径校验异常等,都可能出现。医生需要理解系统逻辑,才能判断是否重新标定或修改计划。这类能力并非传统训练中的重点,却成为机器人时代的新专业素养。
因此,学习曲线并没有缩短,而是从“单纯手部技巧”转向“空间认知 + 流程管理 + 系统理解”的综合能力。
三、机器人改变的是“能力结构”,而不是“能力要求”
传统手术训练强调:
手部精细操作
触觉反馈判断
长时间体力耐受
而机器人手术逐渐强调的是另一组能力,而且在不同专科中表现各异:
在腹腔镜机器人手术中,更重要的是:
对放大影像的精细解读
通过数字界面进行精确动作控制
在稳定视野下完成复杂精细操作
在骨科机器人手术中,更强调:
影像与实际解剖的对应理解
规划路径与实际操作的一致性判断
对导航、定位系统行为的理解
无论是哪一类机器人,医生都逐渐从“器械直接操作者”,转向“通过系统完成操作的控制者”。
这是一种能力重心的转移,而不是能力门槛的降低。学习曲线不是变短,而是变形——从手部极限能力的积累,转向系统认知与综合判断能力的建立。
四、MedRobot 观察
医院在推广机器人时,往往看到的是:
新医生较快完成基础操作
早期训练阶段顺利过渡
但真正决定成熟度的,是:
✔ 复杂术式的独立完成能力
✔ 突发情况的处理能力
✔ 对手术全流程的系统掌控这些能力的建立,并不会因为机器人而自动缩短时间。
“机器人会让学习曲线变短”的说法,反映的是对技术友好性的直观感受,但并不等同于专业成长路径的缩短。
手术机器人正在改变的,不是医生需要付出的努力,而是努力的方向:从依赖手部极限能力,转向依赖系统理解与综合决策能力。
这种转变,使外科训练逐步走向更数字化、更结构化的模式。
从长期看,这将提高整体外科能力的稳定性和可复制性,但短期内,它并不会让成为一名成熟术者变得“更容易”。
这不是门槛降低,而是门槛重构。
知名手术机器人整机公司及上下游企业
综合▌微创机器人 | 佗道医疗 | 直观复星 | 威高
腔镜▌精锋医疗 | 思哲睿智能医疗 | 康诺思腾
骨科▌罗森博特 | 元化智能 | 长木谷 | 鑫君特| 史赛克
血管介入▌爱博合创 | 唯迈医疗
穿刺机器人▌真健康 | 惟德精准
手术机器人工具▌良医






