 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库【AI加油站】机器人设计系列一百一十八:《机器人原理与技术》揭秘:从古代偃师到未来战士,一文读懂机器人如何改变世界(附下载)

核心总结
从木牛流马到脑控机器人,读懂这本“机器人百科全书”,你就看清了未来十年的科技走向
你是否想过,几千年前的中国人就已经造出了“歌舞机器人”?你是否知道,如今的手术机器人可以在血管里“游泳”?你是否好奇,为什么说2050年机器人足球队将战胜人类冠军?
今天,让我们一起翻开这本被称作“机器人百科全书”的《机器人原理与技术》,从古代传说到未来展望,从基本概念到前沿科技,彻底弄懂这门改变世界的技术。
一、机器人的前世今生:比你想象的更古老
1. 古代机器人的惊人传说
很多人以为机器人是现代产物,但书中记载的第一个故事就会让你大吃一惊。
早在公元前900多年的周穆王时期,中国就有了“歌舞机器人”的记载。据《列子·汤问篇》,能工巧匠偃师制作了一个“美男子”伶人,能歌善舞,动作自然到让周穆王以为是个真人。当这个伶人向王妃“抛媚眼”时,穆王差点要杀掉偃师——直到把伶人拆开,才发现里面全是皮革、木头和颜料。穆王这才感叹:“人的技艺竟能与天地自然同功,真是巧夺天工!”
这还没完。东汉张衡发明了**“记里鼓车”**,堪称古代的“里程计”,车每走一里,车上的小人自动击鼓一次。三国时期诸葛亮发明的 “木牛流马” ,能在羊肠小道上运送200公斤粮食,堪称最早的仿生机器人。
西方同样有精彩记载:希腊神话中的青铜巨人 “塔罗斯” ,是第一个记载的“机器战士”;而著名的 “特洛伊木马” ,则是史上最早的“欺骗型机器人”。
2. 机器人三定律:AI时代的第一部“宪法”
1950年,科幻大师阿西莫夫在《我,机器人》中提出了著名的 “机器人三定律” ,至今仍是AI伦理的核心基石:
第一定律: 机器人不得伤害人类,或袖手旁观让人类受到伤害。
第二定律: 在不违反第一定律的前提下,机器人必须服从人类命令。
第三定律: 在不违反前两条定律的前提下,机器人必须保护自己。
这不仅是科幻设定,更是今天讨论AI安全、自动驾驶伦理时绕不开的“源代码”。想象一下,如果一辆自动驾驶汽车必须在“撞行人”和“牺牲乘客”之间做选择——这正是第一定律的现实考验。
3. 现代机器人的“两位父亲”
现代机器人的诞生源于两个分支:遥控机械手和数控机床。
乔治·德沃尔 在1954年申请了工业机器人专利;约瑟夫·恩格尔伯格 在1956年创立了世界第一家机器人公司Unimation,并在1961年造出了第一台工业机器人Unimate。恩格尔伯格因此被称为 “现代机器人之父”。
1962年,美国推出了VERSATRAN机器人;1979年,PUMA机器人问世,成为工业机器人的经典代表;1978年,日本发明了SCARA水平关节机器人,至今仍在电子装配线上大量使用。
书中有一个有趣的细节:恩格尔伯格曾带着Unimate机器人上电视节目,表演倒啤酒、打高尔夫、指挥乐队——在那个年代,这绝对是最酷的科技秀。
二、机器人到底是什么?——打破砂锅问到底
1. 定义之争:多少种说法才够?
关于“什么是机器人”,国际组织给出了不同定义:
• 美国机器人协会: 一种具有编程能力的多功能操作机 • 国际标准化组织(ISO): 自动的、位置可控的、具有编程能力的多功能操作机 • 更通俗的理解: 具有拟人功能的、可编程的、自动化的机械电子装置
专业解读: 这些定义的共同核心是三个关键词:拟人(像人的某部分)、智能(有感知或识别能力)、可编程(能通过编程自动完成任务)。扫地机器人符合,洗衣机不符合——因为洗衣机没有“感知环境并自主决策”的能力。
2. 机器人如何分类?一张表看懂
趣味知识: 你知道还有“体育机器人”这个分类吗?书中提到,这是较新的概念,泛指各类与人类体育运动相对应的机器人——比如投篮机器人、乒乓球机器人。
3. 中国机器人:从追赶到领跑
书中用大量篇幅介绍了中国机器人的发展历程。蒋新松院士被誉为 “中国机器人之父” ,他领导的中科院沈阳自动化所是中国机器人研究的摇篮。
重磅成果:
• “蛟龙”号 载人潜器下潜至7062米,在深海发现未知生物,Science杂志专门撰文报道 • “嫦娥”计划 应用了空间机器人技术 • 手术机器人 已获得医疗许可证,临床应用上千例 • 智能药丸 已开始批量应用
书中还提到一个重要概念:“机器人化机器” ——在传统机械中引入机器人技术,使其具有智能。比如盾构机、自动摊铺机、隧道掘进机器人等。这个概念正是蒋新松院士提出的。
三、机器人的“身体”与“大脑”——核心技术拆解
1. 机器人的七大组成部分
书中将机器人系统拆解为七大部分:
1. 机器人本体(机械结构系统) 2. 感知系统(内部传感器+外部传感器) 3. 控制系统(驱动控制器→运动控制器→作业控制器) 4. 决策系统(规划任务、学习能力) 5. 通信系统 6. 人机交互系统 7. 软件系统
打个比方: 本体是“骨骼肌肉”,感知系统是“感官”,控制系统是“小脑”,决策系统是“大脑”,通信系统是“神经网络”,人机交互是“语言”,软件是“灵魂”。
2. 自由度:机器人“灵活度”的核心指标
书中反复强调 “自由度(DOF)” 这个概念。简单说,一个刚体在空间中有6个自由度:3个平移(前后、左右、上下)+ 3个旋转(俯仰、偏航、滚转)。
人的手臂有7个自由度,所以非常灵巧,可以绕开障碍物从不同方向到达同一点。大多数工业机器人有6个自由度,刚好够用。如果少于6个,会有动作死角;多于6个,就成了“冗余自由度机器人”,可以更灵活,但控制也更复杂。
专业解读: 每个关节的“机动度”不等于“自由度”。关节数越多,机动度越高,但不一定都算自由度——只有独立驱动的主动关节才算。
3. 运动学:机器人如何“知道自己在哪里”?
书中用大量篇幅讲解了坐标变换和D-H参数法——这是机器人运动学的数学基础。
简单理解: 机器人有多个关节,每个关节都有自己的坐标系。要知道“手”在空间中的位置和姿态,就需要把这些坐标系一个一个“串”起来,通过矩阵运算完成变换。
书中特别强调了 “正运动学” 和 “逆运动学” 的区别:
• 正运动学: 已知各个关节的角度,求手部的位置——相对简单。 • 逆运动学: 已知手部要达到的位置,反推各个关节的角度——这就是传说中的 “手臂解” ,往往有多个解,需要选择最优的一个。
真实案例: 你伸手去拿桌上的水杯,大脑就在实时求解逆运动学问题——确定肩、肘、腕每个关节该转多少度。机器人做同样的事,要靠数学运算。
4. 动力学:机器人需要多大力气?
运动学只关心“位置”,动力学才关心“力”。书中用 θ-r操作机(一个转动关节加一个伸缩关节)为例,推导出了力矩方程:
[
T_{\theta} = m_1 r_1^2 \ddot{\theta} + m_2 r^2 \ddot{\theta} + 2m_2 r \dot{r} \dot{\theta} + g\cos\theta (m_1 r_1 + m_2 r)
]
每一项都有物理意义:
• 前两项:惯性项(加速需要的力量) • 第三项:哥氏项(转动与伸缩相互影响) • 第四、五项:重力项(抵抗重力需要的力)
专业解读: 书中通过计算发现,重力项往往远大于其他项。这意味着机器人设计时要重点考虑重力补偿,否则电机大部分力气都用在“扛自己”上了。
5. 轨迹规划:机器人如何“走稳每一步”?
书中用一整章讲轨迹规划,核心是让机器人的运动平滑、连续、无冲击。
两种主要方法:
1. 关节空间规划:直接规划每个关节的角度变化曲线。计算量小,适合点对点运动。 2. 笛卡儿空间规划:规划手部在空间中的直线、圆弧轨迹。更直观,但需要实时求解逆运动学。
三次多项式 vs 五次多项式:
• 三次多项式:保证角度和角速度连续,但角加速度可能突变,电机可能受冲击。 • 五次多项式:额外保证角加速度连续,运动更平滑,但计算量更大。
通俗理解: 三次多项式像新手司机——速度变化还算平顺,但“油门”可能会突然踩深;五次多项式像老司机——加减速都丝滑流畅,乘客几乎感觉不到。
四、机器人如何“听话”?——控制系统的奥秘
1. 三级递阶控制
书中将机器人控制系统分为三个层级:
打个比方: 第一级是“老板”——决定要做什么;第二级是“经理”——规划怎么做;第三级是“员工”——具体执行。
2. 控制策略“全家福”
书中列举了丰富的控制策略,简单介绍几种:
• PID控制:最经典、最常用,算法简单、可靠性高 • 最优控制:追求“最短时间”或“最小能耗” • 自适应控制:根据运行状态自动调整参数,适应未知环境 • 模糊控制:模仿人类经验,用“大概”“稍微”这类模糊语言做决策 • 神经网络控制:模仿人脑神经元,自主学习 • 滑模控制:对参数变化不敏感,鲁棒性极强
趣味知识: 书中还提到 “记忆-修正控制” ——机器人可以“记住”上次运动的误差,下次自动修正。多次重复后,轨迹会越来越精准。这就像你第一次投篮投偏了,第二次自动调整角度。
3. 力控制与柔顺控制
当机器人需要接触物体(如装配、打磨、抓取鸡蛋)时,单纯的位置控制不够用,还需要力控制。
一个经典例子: 把销钉插入孔中。如果位置稍有偏差,硬推会把零件挤坏。有了力反馈,机器人可以“感觉”到阻力,自动调整角度,直到销钉顺滑入孔。
书中区分了两种“柔性”:
• 主动柔性:通过力反馈控制系统主动调整 • 被动柔性:在手臂和手爪之间加装弹簧等柔性机构,靠机械变形自适应
RCC(远距离中心柔性) 是一种成功的被动柔性装置,常用于精密装配。
五、精彩案例:倒立摆与擦地机器人
1. 倒立摆:机器人的“平衡大师”
倒立摆(一个可以在轨道上移动的小车,上面立着一根可摆动的杆)是控制理论的经典研究对象。控制目标:让摆不倒,让车不动。
难点: 这是一个高阶、多变量、非线性、时变、强耦合、自然不稳定的系统——翻译成人话就是“非常难控制”。摆倒下只需要一两秒钟,控制必须又快又准。
书中用拉格朗日方法推导了倒立摆的动力学方程,建立了状态空间模型,然后用LQR(线性二次型最优控制) 设计了控制器。
拓展思考: 倒立摆的研究对于仿人机器人至关重要。人走路时,身体重心在支撑点之上,本质上就是一个倒立摆系统。掌握了倒立摆的控制,就掌握了双足机器人的平衡技术。
2. 擦地板机器人:一个完整的系统设计案例
书中提供了一个完整的擦地板机器人设计案例,包括:
• 走行机构(轮式移动) • 手臂机构(擦地动作) • 视觉器官(识别污渍、定位导航) • 安全保护(防碰撞、防跌落)
专业解读: 这个案例虽然看似简单,但涵盖了机器人系统设计的全部要素:感知(看到污渍)、决策(规划路线)、行动(走到污渍处擦地)、安全(防撞防摔)。市面上畅销的扫地机器人,本质上就是这类机器人的商业化版本。
六、未来已来:机器人将如何改变世界?
1. 令人惊叹的成就
书中列举了机器人的伟大成就:
• 火星上的 “勇气号”与“机遇号” • 中国航天的 “玉兔”与“嫦娥三号” • 深海中的 “蛟龙”号 • 可以跳 “千手观音”团体舞的仿人机器人 • 日本开发的 “考试机器人” ,目标在2022年考入东京大学(虽然目标未完全达成,但进展惊人) • 可以在人体血管中运行的微纳机器人
2. 对人类的挑战
书中提出了一个发人深省的问题:机器人会超过人类吗?
作者的分析很犀利:
• 人类的进化是等差级数(缓慢、线性) • 机器人的进化是等比级数(加速、指数级) • 全人类的技术开发几乎都在为机器人的进化“服务”——新的传感器、更快的芯片、更好的算法,都会被用到机器人身上
凯文·渥维克教授在《机器的征途》中提出了更尖锐的观点:
• 目前人类是地球的主宰 • 不久将来,机器可能比人类更聪明 • 那时,机器将成为地球的主宰
书中还讲了一个黑色寓言:“人园”——几百年后,机器人统治了世界,人类被养在“人园”里,就像今天我们去动物园看动物一样。一个机器人小孩对父母说:“今天带我去人园玩玩吧。”
如何避免“人园”悲剧? 书中引用了一些科学家的观点:人类思维的规则几乎不可能被完全破译,机器能接受的永远只是残缺不全的人的智能。但图灵奖得主吉姆·格雷则认为:由水、蛋白质构成的生物体可以进化,由导线、硅片构成的计算机也可以进化。
这场争论至今没有定论,但值得每一个关心未来的人思考。
3. 2050年的梦想
书中提到一个激动人心的目标:2050年,一支机器人组成的足球队将战胜当时世界杯足球赛的人类冠军队。
这是RoboCup(机器人世界杯)的终极梦想。从书中展示的仿真机器人、小型机器人、人形足球机器人图片可以看到,这个梦想正在一步步接近现实。
七、延伸知识:机器人学的研究领域
书中归纳了机器人的主要研究方向:
1. 机器人基础理论(运动学、动力学、控制理论) 2. 机器人技术研究(传感技术、驱动技术、通信技术) 3. 机器人应用技术(工业、医疗、服务、军事) 4. 机器人机构学(串联、并联、移动机构) 5. 机器人仿真(MATLAB工具箱等) 6. 多机器人系统(多智能体、网络化机器人) 7. 微纳机器人(细胞操作、血管机器人)
书中还特别提到,机器人的研究已经拓展至哲学及社会学范畴。《机器人伦理学》就是研究机器人的伦理、道德、法律的学科。
结语:这本书适合谁?
《机器人原理与技术》是一本**“从入门到实战”**的教材,既有历史故事,又有数学推导;既有基础理论,又有仿真实例。
最适合的人群:
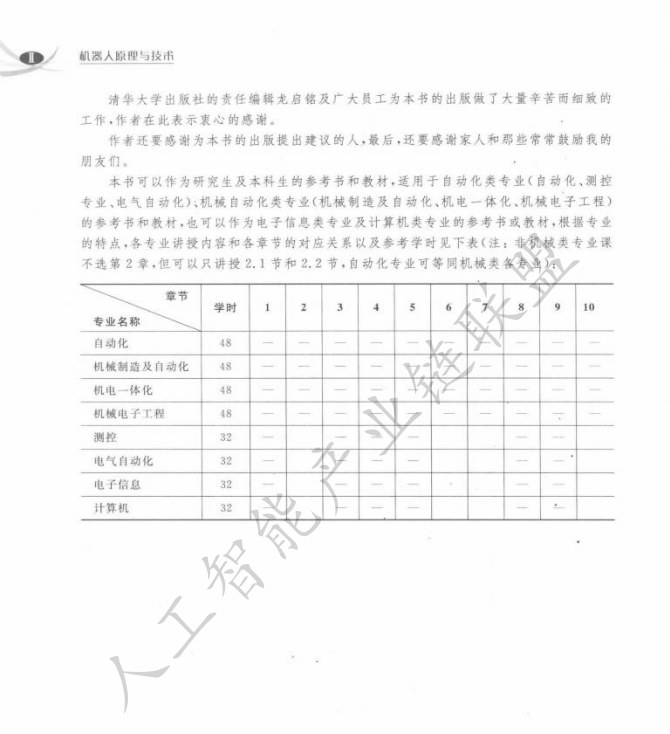
• 自动化、机械、电子、计算机专业的学生 • 参加“卓越工程师计划”和“大学生创新创业活动”的同学 • 对机器人感兴趣的爱好者 • 想要了解未来科技趋势的读者
书中最后的仿真实例(机器人运动学仿真、双机器人协调仿真)可以直接运行,对动手实践很有帮助。
机器人不再是科幻电影中的角色,它们正在走进工厂、医院、家庭,甚至我们的血管。读懂了机器人,就读懂了未来。
而你,准备好迎接这个“人机共存”的新时代了吗?
本文内容总结自董慧颖编著的《机器人原理与技术》(清华大学出版社),结合专业解读编写而成。
本书免费下载地址
关注微信公众号“人工智能产业链union”回复关键字“机器人设计118”获取下载地址。
往期推荐:
【AI加油站】机器人设计系列一:《IBM Robocode人工智能机器人研究》从Java编程到智能战斗系统指南(附下载)





