 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库具身智能三维触觉接近皮肤,让机器人真正“摸”到世界
最新研究发表于《自然·材料》杂志,揭秘了赋予机器人类人指尖触觉感的技术突破。
我国中国科学技术大学与英国剑桥大学的研究团队共同研发出一款微型三维力传感器阵列,其体积仅相当于指尖。其感知压力的能力堪比人类肌肤,不仅能精确辨别压力的大小与方向,而且其灵敏度和空间分辨率均超越了当前最尖端传感器的一个数量级。这一具有突破性的成果近期以《Multiscale-structured miniaturised 3D force sensors》为题,亮相于材料科学领域的权威期刊Nature Materials。
论文的首位作者及共同通讯作者,中国科学技术大学的贠国霖特任教授透露:“我们目前正致力于将传感器技术应用于人形机器人的灵巧之手。在与中国科大人形机器人研究院的张世武副院长携手合作的基础上,我们也在积极寻求与相关企业的合作机会,目标是未来将传感器巧妙地集成到实体机器人的指尖。”
另一位共同作者,剑桥大学的Tawfique Hasan教授亦强调,要将技术成功应用于实际,必须克服一系列工程技术上的难题。目前,我们实验室的传感器耐久性测试大约只能达到三万次循环,而工业应用通常需要十万次至一百万次以上的循环次数,稳定性亦需显著增强。此外,布线问题同样不容忽视,实验室所采用的光刻布线技术成功率较低,尤其是在大规模生产中更为困难,因此,我们亟需与工程技术经验丰富的行业合作伙伴携手,共同寻求解决方案。
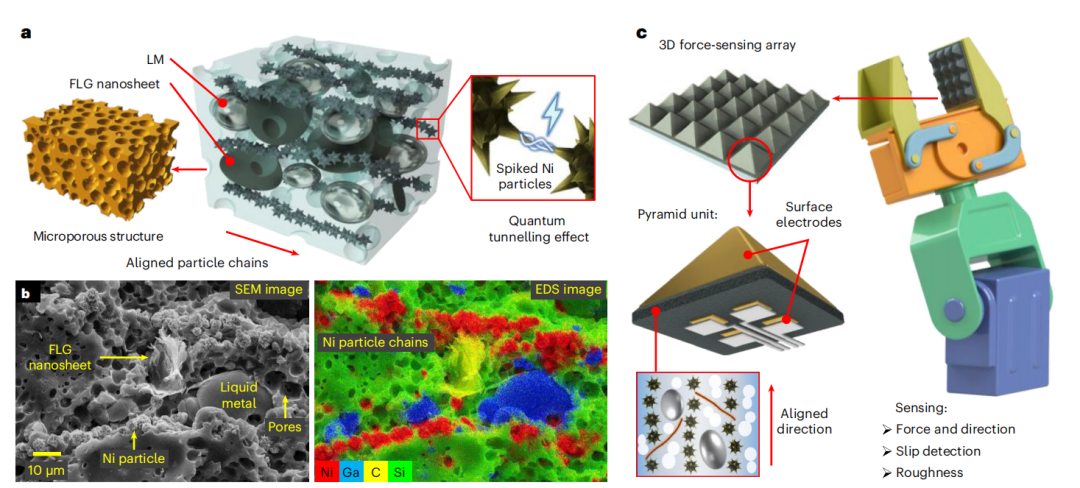
尖锐的镍颗粒、石墨烯纳米薄片以及液态金属微滴。
在磁场的引导下,镍颗粒有序地排列成链状结构,而石墨烯则如同桥梁般将这些链相互连接,液态金属则扮演着可变形节点的角色。经过精心加工,该材料形成了微米级的小孔结构,最终被组装成由边长为200微米的金字塔形阵列,其中每个金字塔均构成一个独立的传感单元。
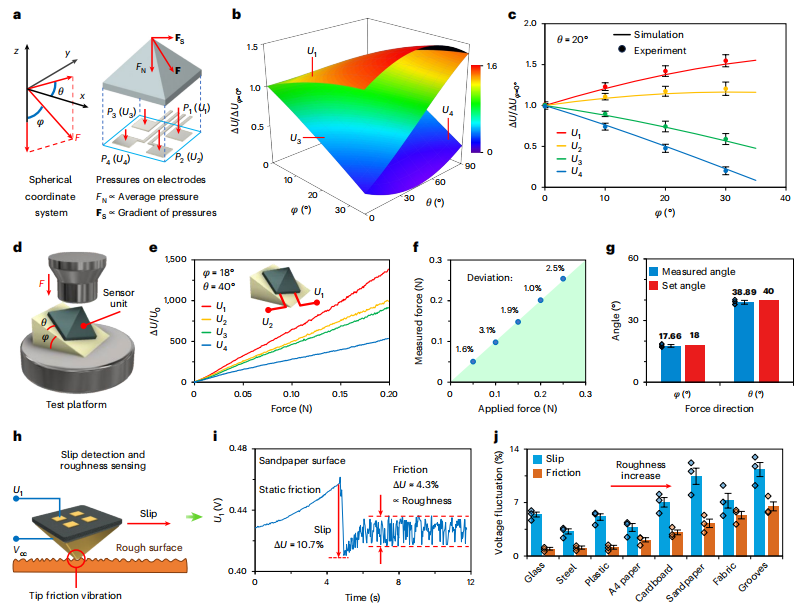
人类手指的触觉感知,依赖于皮下分布的四种独特机械感受器,这些感受器能够感知压力、震动、剪切力和拉伸应变。这一感知系统历经数百万年的进化,至今依旧被视为触觉感知的巅峰之作。在本次研究中,研究人员成功制造出的一款传感器,其尺寸仅为200微米见方,却能同时精确测量三维力的大小与方向,误差控制在两度以内。该传感器的灵敏度高达120/kPa,且触发力仅为0.9微牛顿,这意味着它甚至可以探测到一粒沙子的重量。
(资料来源:https://doi.org/10.1038/s41563-026-02508-7)
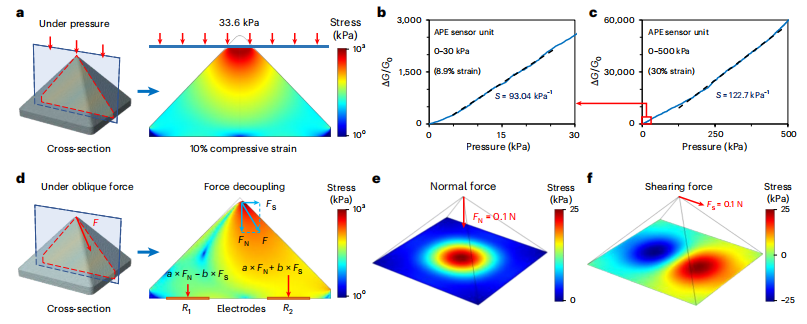
其背后的原理实则并不繁复。金字塔结构的受力特性在于,底部的四个电极在受力时会产生不同的电压信号。当施加垂直压力时,四个电极的电压变化保持一致;而若施加斜向压力,则受力方向对应的电极电压将更为显著。通过计算这四个电极之间的电压差,我们便能准确推断出力的方向、角度以及力度的大小。研究团队运用有限元模拟对这一模型进行了验证,实际测试结果显示,力测量误差控制在5.3%以内,角度测量误差则小于两度。
此传感器不仅具备检测滑动的能力,还能对表面粗糙度进行估算。一旦物体开始从传感器表面滑落,剪切力便会急剧减少,进而引发对应电极电压的瞬间波动。通过120目砂纸进行测试,我们发现电压波动的幅度高达10.7%。这一信号可直接应用于控制机械手,于物体滑落前的一刹那增强夹持力度。此外,该传感器具备类似人类手指的感知能力,能够通过触摸时的振动来评估物体的表面粗糙度。在从光滑玻璃到沟槽深度达到126微米的粗糙表面这一范围内,不同粗糙度的材料测试结果显示,电压波动的幅度呈现出从0.95%至6.5%的线性增长。
(文献来源:https://doi.org/10.1038/s41563-026-02508-7)
研究人员开展了一项演示实验,将四个直径仅为4毫米的传感器单元巧妙地集成了机械手,以执行抓取一个尺寸和质量均未知的纸筒的任务。实验结果显示,传感器在初次接触纸筒的瞬间便感知到了11毫牛的压力,这一压力之轻,以至于纸筒几乎未发生任何形变。机械手据此信号即时调整其姿态,不仅成功地将纸筒举起,而且精确测量出其重量为0.74克,误差仅为3%。与此形成鲜明对比的是,若使用商业化的传感器,其检测的触发极限高达180毫牛,一旦接触便会将纸筒捏扁。
另一场演示更为引人入胜,研究人员巧妙地让机械臂尝试捕捉一枚重量与尺寸均属未知的铁块,并将其精准转移至一个高度同样未知的平台之上。在加持过程中,传感器实时监控着四个电极的电压变化。随着钢块开始滑落,剪切力瞬间下降了5%。控制系统迅速作出反应,立即增强夹持力度,稳固住下滑的钢块。在操作的全过程中,机械手精准测得钢块与传感器之间的摩擦角约为32度,这一数据有助于推算接触面的摩擦系数。当钢块被放置时,传感器凭借剪切力的归零判定成功识别出钢块已触地,随后自动释放钢块。
(源自:https://doi.org/10.1038/s41563-026-02508-7)
为揭示微型化的极致,研究团队精心制作了边长仅200微米的微传感器阵列,其单个单元的体积甚至小于圆珠笔尖。他们逐一将金球与铟球置于阵列之上,传感器凭借对受力大小及方向的精准感知,能够准确测量不同球体的重量与直径,进而推算出其密度,从而区分这两种不同的金属材料。此类尺寸的传感器得以嵌入显微操作器或微型机器人之中,于显微镜下对细胞或微电子元件进行精细操作。
这种材料的制备过程颇具趣味。首先,将所有原料在常温条件下以低速进行搅拌混合,随后将其压入三维打印而成的模具中。接着,将其置于500毫特斯拉的磁场中,在80摄氏度的温度下固化长达12小时。完成固化后,再将材料在140摄氏度的温度下加热3小时,以蒸发掉造孔剂,从而形成相互连通的多孔结构。整个制作流程与工业高分子材料的生产过程并无二致,预示着其具备实现大规模生产的潜力。

图 | 贠国霖
必须指出,此传感器目前仅能探测力的信号。目前,研究团队正积极进行一项新项目,旨在将温度和湿度传感功能融入触觉阵列之中。此外,项目还将融合机器学习技术,使传感器具备识别材料刚度、种类,乃至复杂纹理信息的能力。
免责声明:本文版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!本文内容为原作者观点,并不代表本公众号赞同其观点和对其真实性负责。


为您发布产品,请点击“阅读原文”






