 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库一文分清:MEMS压力、应力与六维力传感器,异同全解析!

很多从业者、学习者都会混淆它们——有人觉得“都是测力的,差别不大”,有人分不清“MEMS压力和MEMS应力到底有啥不一样”,也有人疑惑“六维力传感器和前两者相比,强在哪里”。
今天,我们就用通俗的语言,拆解这三种传感器的“相同点”与“核心差异”,从定义、原理、应用到优势,一次性讲透,帮你快速区分,再也不混淆!
先抓共性:三者的“同源之处”
不管是MEMS压力、MEMS应力,还是六维力传感器,本质上都是“力的感知工具”,核心使命都是将抽象的力学信号(压力、应力、多维度力/力矩)转化为可量化、可分析的电信号,为后续的检测、控制提供数据支撑,这是它们最核心的共性。
除此之外,三者还有三个共同特点,尤其在技术逻辑上高度一致:
1. 核心原理相通:均基于“力致形变-信号转换”的逻辑——外力作用下产生微小形变,通过敏感元件(如应变片、压敏电阻)将形变转化为电信号(电阻、电容变化),再经处理输出可读取数据,其中MEMS类传感器和六维力传感器均广泛用到应变片或压敏电阻的感知特性;

2. 应用场景互补:三者都服务于“力的精准把控”,常出现在同一产业链(如机器人、汽车制造),只是分工不同,比如机器人中,MEMS压力传感器监测指尖压力,MEMS应力传感器检测关节形变,六维力传感器把控整体操作力度,协同实现精准作业;
3. 技术核心一致:都追求“高精度、高稳定性”,核心竞争力在于“对微小力学信号的捕捉能力”,无论是MEMS工艺的微型化感知,还是六维力传感器的解耦技术,本质都是为了提升信号捕捉的精准度和可靠性。
再析差异:从5个核心维度,一眼分清三者
共性之外,三者的差异更为关键——定位不同、测量对象不同、应用场景不同,甚至技术壁垒也有明显区别。我们用“通俗解读+维度对比”的方式,把差异讲透,先看一张清晰的对比表,再逐一拆解:
对比维度 | MEMS压力传感器 | MEMS应力传感器 | 六维力传感器 |
|---|---|---|---|
核心定位 | 测量“表面垂直作用力”,关注“外力大小与作用面积的关系” | 测量“物体内部抵抗形变的内力”,关注“内部应力分布与形变关联” | 测量“三维空间全维度力/力矩”,关注“多方向力的协同感知与精准解耦” |
测量对象 | 单一方向的压力(如流体压力、接触压力),一维为主 | 物体内部的拉应力、压应力、剪切应力,聚焦内部受力状态 | 三个正交方向的力(Fx、Fy、Fz)+ 绕三轴的力矩(Mx、My、Mz),六维同步测量 |
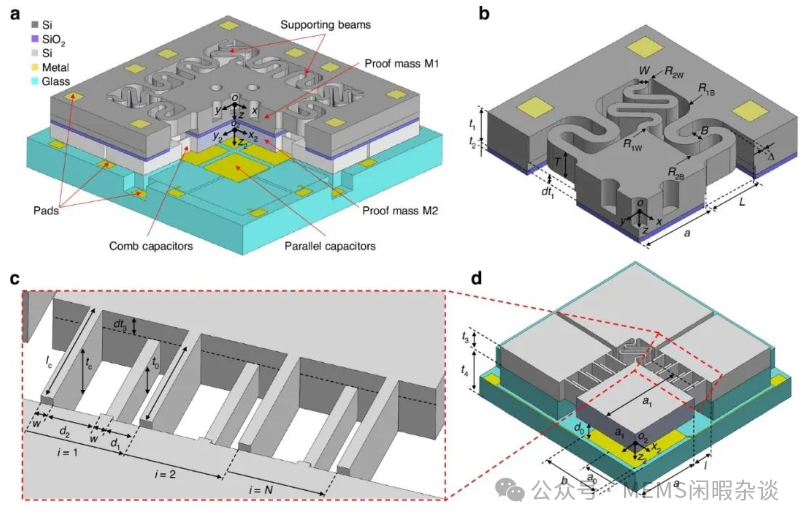
核心原理 | 基于MEMS微纳加工技术,利用压阻效应或电容效应,通过硅薄膜形变带动压敏电阻/电容变化,转换为电信号 | 基于MEMS工艺,将应变片集成在微型弹性结构上,通过结构形变感知内部应力,转化为电阻变化输出信号 | 以“弹性体+应变片”为核心,通过特殊弹性体结构设计和力学解耦技术,避免维度间信号干扰,同步捕捉六维力/力矩信号并转换输出 |
核心优势 | 微型化、低成本、可批量生产,灵敏度高、功耗低,适配小型设备和大规模应用场景 | 微型化、集成度高,能精准捕捉微小应力变化,适配狭小空间和精密构件的内部受力检测 | 全维度感知、解耦精度高,能实现动态力/力矩同步测量,适配高精度、复杂力控场景,是机器人“触觉神经”的核心 |
典型应用 | 汽车胎压监测、电子血压计、智能手机气压计、无人机高度计、工业过程压力控制 | 芯片封装应力检测、航空航天构件应力监测、微型机器人内部形变检测、医疗微器械受力感知 | 人形机器人关节/指尖力控、汽车碰撞测试、骨科手术机器人、航空航天风洞实验、3C精密装配 |
技术壁垒 | 核心在于MEMS微纳加工工艺的稳定性,以及温度漂移补偿技术,门槛相对较低,国产化程度高 | 难点在于微型应变片的集成精度,以及应力信号的抗干扰处理,需解决微小形变的精准捕捉问题 | 核心在于力学解耦技术(避免维度间信号耦合)、非线性标定和算法优化,门槛高,部分高精度产品仍依赖进口,国产化正在突破 |
通俗拆解:用“生活化场景”理解三者差异
看完表格,可能还有人觉得抽象,我们用3个生活化的场景,帮你快速对应三种传感器,瞬间理解:
1. MEMS压力传感器:像“指尖的触感”
你用手指按压手机屏幕,指尖对屏幕施加的“垂直作用力”,就是MEMS压力传感器的测量对象——它只关注“你用了多大劲按”,不关心屏幕内部的变化。就像电子血压计,它测量的是血管对血压计袖带的压力,通过MEMS芯片的薄膜形变,快速转化为血压数据,精准又小巧,这正是它微型化、低成本的优势体现。
2. MEMS应力传感器:像“骨骼的内应力”
你弯腰时,腰部骨骼会受到拉力和压力,内部产生的“抵抗弯腰形变的力”,就是应力——MEMS应力传感器就负责捕捉这种“内部受力”。比如芯片封装时,封装材料冷却收缩会对芯片内部产生应力,MEMS应力传感器能精准监测这种微小应力,避免应力过大损坏芯片,它的核心价值就是“感知内部隐形受力”,且能集成在微小构件上。
3. 六维力传感器:像“人的手臂控制力”
你用手拿起一个鸡蛋,不仅要控制“向上的托力”(Fz),还要控制“左右的平衡力”(Fx、Fy),同时还要避免“用力过猛捏碎鸡蛋”(绕三轴的力矩)——这就是六维力传感器的工作逻辑,它能同步捕捉六个维度的力和力矩,就像给机器人装上“灵活的手臂”,让机器人既能稳稳抓取鸡蛋,又能精准完成精密装配,核心在于全维度感知和精准解耦,避免不同方向力的信号干扰。
关键总结:怎么选?看“需求”就够了
很多人纠结“哪种传感器更好”,其实没有绝对的优劣,只有“是否适配需求”。记住三个核心选择逻辑,再也不踩坑:
1. 若需测量“表面压力”,追求微型化、低成本、大规模应用——选MEMS压力传感器(如消费电子、汽车常规压力监测);
2. 若需测量“物体内部应力”,关注内部形变和受力分布,且空间有限——选MEMS应力传感器(如精密构件、微型设备);
3. 若需“全维度力/力矩同步测量”,追求高精度、复杂力控——选六维力传感器(如机器人、精密手术、航空航天)。
最后要强调的是,三者并非“非此即彼”,而是“协同互补”:在人形机器人中,MEMS压力传感器监测指尖接触压力,MEMS应力传感器检测关节内部应力,六维力传感器把控整体操作力度,三者配合,才能实现“精准、安全、高效”的作业;在汽车制造中,MEMS压力传感器监测胎压和油路压力,MEMS应力传感器检测车身结构应力,六维力传感器助力碰撞测试和装配精度控制,共同保障产品品质与安全。
随着MEMS技术与力学解耦技术的不断升级,三种传感器的性能也在持续优化——MEMS类传感器更精准、更集成,六维力传感器更小巧、成本更低,国产化替代进程也在加速。未来,它们将继续在更多领域协同发力,解锁更精准的力控体验,支撑智能制造、医疗健康等领域的高质量发展。

介绍最新传感器产品和与传感器有关的智能硬件、物联网、汽车电子、智能家居开发和创新资讯,构建以传感器为核心的智能生态圈。
联系邮箱:cathy@eetrend.com
电话:18676786761





