 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库从“能动”到“能用”:人形机器人规模化落地的关键挑战
随着人形机器人技术持续升温,行业正从概念验证迈向工程落地阶段。当前市场关注的重点,已经从“机器人能做什么”,转向“是否能够稳定运行、持续工作并实现规模化部署”。
在人形机器人走向实际应用的过程中,系统复杂度显著提升,技术挑战也随之加速暴露。如何在复杂系统中实现稳定可靠的性能,成为行业必须面对的核心问题。而在这一过程中,
测试
测量
能力正逐步从辅助工具,演变为支撑工程落地的关键基础设施。
系统复杂度提升带来的
测试
挑战
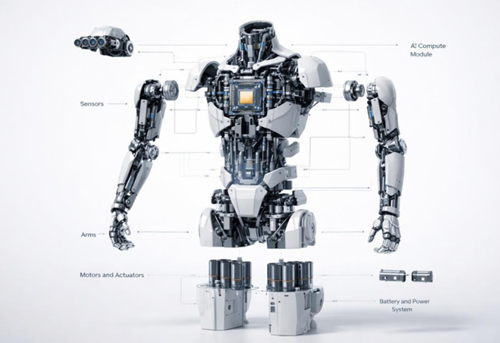
人形机器人本质上是一套高度耦合的复杂系统,涵盖感知、决策、执行及供电等多个关键环节。从多模态传感器的数据采集,到
AI
芯片
与高速互联链路的数据处理,再到电机驱动系统的动作执行,以及电池与
电源
系统的能量供给,每一个环节都高度关联。
在这样的系统中,问题往往并非来自单一器件,而是多个子系统之间的耦合效应。例如,高速链路中的信号完整性问题可能导致感知延迟,驱动系统的瞬态响应问题可能引发动作不稳定,而
电源
或电池系统的波动则可能进一步放大这些问题。
随着系统复杂度提升,
测试
需求也从单点验证转向多维度协同分析。
多维耦合下的“难测性”挑战
人形机器人的
测试
难点,在于多个关键维度需要同时满足。一方面,高速互联链路承载着越来越大的数据传输压力。PCIe等接口已成为系统性能瓶颈,其稳定性直接影响感知与决策效率。另一方面,执行系统中的动态信号具有强瞬态特征。电机驱动、电流变化以及宽禁带功率器件的动态行为,对
测试
设备的带宽、噪声及抗干扰能力提出了更高要求。
同时,动力系统的复杂性也在不断提升。电池不仅影响续航能力,还直接关系到系统在动态负载下的稳定输出,其一致性、电化学特性以及寿命表现均成为关键指标。
因此,人形机器人
测试
的核心,已转变为覆盖感知、传输、控制、执行及供电的全链路验证。
从单点
测试
走向系统级验证
面对上述挑战,传统基于单一测项的
测试
方法已难以满足需求。行业正在向系统级、全链路的
测试
体系演进。围绕人形机器人的核心架构,
测试
需求已逐步形成多层级覆盖:
l 在感知层,需要对MIPI、GMSL、FPD-Link等链路进行图像与视频数据完整性验证;
l 在决策控制层,需要对PCIe等高速总线进行一致性与稳定性
测试
,以支撑高算力系统运行;
l 在执行层,需要对电机控制策略与功率器件动态行为进行分析,确保动作响应的准确性;
l 在动力与供电层,则需要对电池、
电源
及相关系统进行综合评估,以保证长期稳定运行。
这一变化意味着,
测试
测量
正在从“验证工具”转变为系统设计与优化的重要组成部分。
测试
方案体系如何支撑工程落地
针对人形机器人多维耦合的
测试
挑战,行业需要的不再是单一设备,而是一套能够覆盖完整链路的
测试
解决方案。
在这一背景下,泰克作为相关的
测试
测量
厂商,正围绕机器人核心架构构建系统化
测试
能力:
l 在高速互联领域,通过高带宽
示波器
与协议分析方案,实现对PCIe等关键接口的数据完整性验证;
l 在电机与功率
测试
方面,结合动态功率分析(如IMDA)与宽禁带器件
测试
(如WBG双脉冲
测试
),帮助工程师捕捉关键瞬态行为;
l 在
电源
与电池
测试
方面,通过高精度数字万用表、电池阻抗
测试
及
电源
完整性分析手段,对电池一致性、
电源
稳定性及系统供电能力进行评估;
l 在复杂电磁环境下,通过低噪声
测量
能力,还原真实信号,避免
测试
结果被系统噪声掩盖。

这些
测试
能力的核心价值,不仅在于“
测量
结果”,更在于帮助工程师在系统层面理解问题来源,从而优化设计并提升整体可靠性。
未来的工程竞争力,从技术验证到工程应用是关键一步
随着人形机器人逐步走向实际应用,行业对系统可靠性的要求持续提升。技术能否真正落地,不仅取决于算法与硬件能力,也取决于是否具备完善的验证体系。
测试
测量
在这一过程中,正在发挥越来越重要的作用——通过对信号、链路与系统行为的精准分析,使复杂系统变得可理解、可验证、可优化。
当前,人形机器人已经具备高度关注度,但真正决定其发展速度的,将是工程能力的成熟度。从感知到执行,从数据到能量,每一个环节都需要被验证。只有在全链路具备稳定性与一致性的基础上,人形机器人才能从“可演示”走向“可规模化应用”。
测试
测量
将持续作为关键支撑技术,帮助行业跨越从技术突破到工程落地的最后门槛。





