 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库炸场!城市 NOA 杀进 10 万级,中国智驾彻底普惠

据中国汽车工业协会发布的《2025城市NOA汽车辅助驾驶研究报告》显示,2025年前三季度,中国L2级辅助驾驶功能在乘用车市场的渗透率已达66.1%。这意味着,每售出三辆新车,约有两辆具备智能辅助驾驶能力。尤其是在20万元以下的主流价格区间,中高阶智能驾驶系统的搭载率已经从年初的不足5%,跃升至年末的逾50%,实现了跨越式增长。
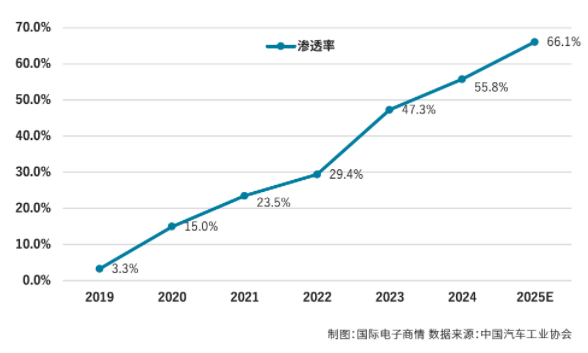
图1:历年中国乘用车L2及以上渗透率 制图:国际电子商情 数据来源:中国汽车工业协会
然而,更令人瞩目的转变在于,曾被视为豪华车型专属的城市NOA(Navigation on Autopilot, 导航辅助驾驶)功能,如今正加速“飞入寻常百姓家”。根据中国汽车工业协会《2025城市NOA汽车辅助驾驶研究报告》数据显示:2025年1-11月,中国市场搭载城市NOA功能的乘用车累计销量达312.9万辆,渗透率为15.1%。其中,自主品牌乘用车销量达到253.73万辆,占比达到81.1%;起售价低于30万元的车型占比为68.9%,成为推动技术普惠的主力军。
高工智能汽车研究院进一步指出,2025年,15万元及以下价格区间的车型首次实现城市NOA前装量产交付,全年销量突破10万辆;2026年1-2月,这一趋势持续加速——中国市场(不含进出口)乘用车前装标配NOA(含高速与城区场景)交付量达69.06万辆,同比激增102.94%。
可以毫不夸张地说,在当前智能驾驶从技术突破迈向规模化普惠的过程中,“城市NOA的大规模普及”,已成为智驾走向商业成功的决定性战场。
高阶智能驾驶规模化落地的破局之路
城市NOA是一种应用于城区道路的高阶辅助驾驶功能,目标是实现从出发地到目的地的“点到点”全程智能辅助驾驶。从发展趋势看,该技术正从依赖高精地图,逐步转向“重感知、轻地图”甚至“无图”方案,并借助大模型提升应对复杂路况的能力。
简单来说,它能让车辆在复杂的城市道路环境中自主完成多项工作。包括:自动识别车道、红绿灯、行人和非机动车辆;自主完成变道、转弯、避障、跟车、启停等操作;结合导航路径进行智能路线规划。不过需要注意的是,城市NOA目前仍属于L2级到L3级之间的辅助驾驶,不是完全自动驾驶,驾驶员在驾驶过程中必须保持注意力,随时准备接管车辆。
麦肯锡在《2025中国汽车消费者洞察报告》中指出,城市NOA当前已跃升为消费者购车决策中的“三大核心刚需”之一,高达71%-76%的用户明确要求新车标配该功能,约90%的消费者表示愿意为高阶智能驾驶功能支付溢价,其中近三成(30%)甚至愿意额外承担超过1万元的费用,充分彰显了消费者对高阶智驾价值的高度认可与强烈需求。
从当前的市场发展格局看,车企自研城市NOA主导市场格局,主要是特斯拉、蔚来、小鹏、理想、小米、鸿蒙智行等跨界和造车新势力企业。多数车企选择与第三方智能网联供应商合作落地城市NOA,与第三方供应商合作城市NOA的品牌约29个。
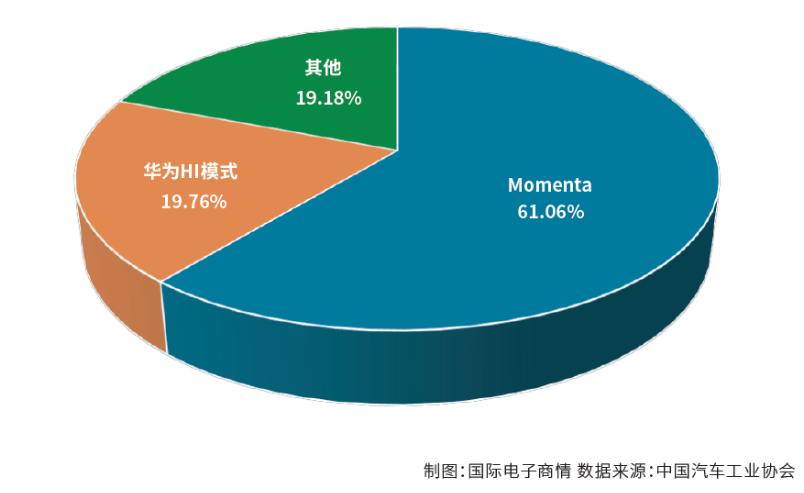
图2:城市NOA第三方供应商市占率统计(2025年1-11月) 制图:国际电子商情 数据来源:中国汽车工业协会
但要想在这个快速增长的赛道上吃到更多市场红利,也不是一件容易的事情。体验、成本、安全与政策的复杂协同,都是决定其成败的关键所在。
● 安全是1,体验与成本是后面的0
一切商业化的前提是安全,工程师在挑战1%极端场景的同时,必须确保系统在95%普通场景中的绝对稳定,这才是大众信任的基石。因此,如果我们把智驾的“好用”拆解为场景广度、处理深度与人机交互温度三个维度,那么,当前泊车体验已经步入用户“爱用”阶段,而城市NOA正在强化泛化能力和安全冗余,从“可用”迈向“好用”。
地平线创始人兼CEO余凯博士认为,智能驾驶如同智能汽车的“基带”,是重要的基础设施,给用户提供安全、便捷、舒适等标准化的“功能价值”。而“功能价值”的产品核心竞争力在于“以快打慢、以高打低”——加快技术研发速度、加大资源投入,跟上技术迭代的速度,是所有参与者共同面临的重要课题。
基于这套逻辑体系,地平线推出了中国首个基于一段式端到端技术的智驾大模型HSD。与传统方案把感知、决策、控制拆成几个模块拼接不同,它用一个模型直接从传感器数据输出控制指令,大幅降低计算时延,让车辆的反应更接近人类司机,遇到城市道路的复杂路况也更加从容。
● 用户信任始于拟人化交互,成于全场景可靠,是规模化普及的终极标尺
如何建立信任?借用吉利汽车研究院智能驾驶中心主任李博的观点,就是“系统的行为必须与人类驾驶员的预期高度一致”。换句话说,信任的终极体现是用户“愿意自发推荐”,这要求系统必须深度契合从城市通勤到郊野探索的全场景真实需求。举例而言,得益于端到端技术的进步,智驾系统正从因“行为不当”而被抱怨,转向因“礼貌礼让”而获得用户赞赏。这种对社会化驾驶规则的理解与遵守,正在构建更深层的心理安全。
● 成本拐点,源于硬件重构与软件范式的双重驱动
当安全与信任的根基得以巩固,成本优化便成为推动普及的关键杠杆。当前智驾成本下降并非单一因素所致,而是性能迭代、系统集成、规模效应与开放协作“四轮驱动”的结果。一方面,国产高性能芯片重构了硬件成本结构。另一方面,端到端等新一代算法范式的成熟,大幅降低了系统的软件复杂性与开发成本。
而在这两个方向之外,还有一条更长的路——物理AI。
新的商业模式正驱动智驾规模化共赢
余凯认为,智能驾驶大模型是物理AI基座模型的开端。一个优秀的智驾大模型,承载着三大关键生态价值:它是具象化技术实力的“样板间”、筑牢技术根基的“压舱石”、也是供合作伙伴自由创新的“公约数”。他指出,随着行业全面转向数据驱动范式,所有参与者共同面临三重严峻挑战:模型训练算力成本高昂(年投入动辄数十亿元)、顶级AI算法人才极度稀缺、产品迭代速度以“月”为单位持续加速。
这一过程中,“推动底层计算技术向更高性能演进,筑牢物理AI底座”与“共建开放生态,将高阶智驾体验转化为规模化用户价值”,将成为破局的两大方向。这也是地平线选择将其已验证的全栈能力,以全新的“算法服务”模式——HSD Together,向整个行业开放的原因。
在此模式中,地平线与合作伙伴在明确分工下深度共创。合作伙伴可以聚焦于自身优势:系统集成测试、车型适配开发、功能定制开发、硬件与底软交付;地平线则提供覆盖产品开发全周期的“算法服务”,包括:数据服务与艾迪SaaS平台、专业的算法适配工程与咨询服务,以及最核心的基座模型授权。
如果将2025年视为“智驾普及元年”,余凯博士预测智能驾驶将在3年内实现脱手开(hands off)、5年内实现闭眼开(eyes off)、10年内实现随心开(minds off)。面对行业快速收敛的新阶段,“自研+第三方合作”是智能化拐点下的最优解。由于全栈自研门槛极高,开放合作将成为主流模式,未来行业有望呈现“20%自研+80%合作”的状态。
然而,所有技术探索与商业模式的创新,均指向了一个更深层的问题:如何让最好的技术,服务于最广泛的人群?
如前文所述,2024年,好用的城市NOA功能主要覆盖20万元以上车型;2025年,这一门槛已下探至最低13万元级别。“但是,占据中国市场半壁江山、价格在10万元级的国民车,难道就不配拥有好用的城市辅助驾驶吗?”
地平线副总裁兼首席架构师苏箐判断认为,智能驾驶行业在完成从“规则驱动”到“数据驱动”的内核重构阶段后,接下来即将进入基于新范式的深度优化与工程攻坚期。过去泾渭分明的L2与L4世界被打通,成熟好用的城区L2将经过L3的短暂过渡,成为通向L4的坚实桥梁。“城区L2将迎来巨大的发展红利期。”他指出,“这就是计算机工业的好处——它的突破成本极其高,但是复制成本极其低。让10万元甚至更低价格的车型拥有同样好用的智能驾驶体验,这个时代一定会到来。”
迈向高阶智驾的体系化能力
如果说“BEV(Bird’s Eye View,鸟瞰视角)”和“端到端”是过去几年里自动驾驶领域先后出现的热门词汇,那么进入2026年之后,VLA(Vision-Language-Action,视觉-语言-动作),则当仁不让的接过了“最热门词汇”这一头衔。
之所以要研发VLA模型,是因为在技术路径上,当前的端到端技术解决了高频场景应用问题,而要解决传统自动驾驶系统决策可解释性不足、“长尾”场景适配薄弱两大痛点,实现从“感知-执行”到“类人推理”的技术跃迁,离不开语言大模型带来的场景理解与推理能力。
简单而言,就是在辅助驾驶中,VLA模型会将传感器数据先变成语言和符号,再通过推理形成决策交由车辆执行,从而避免“黑箱”情况。
以一辆在城市繁忙车流中行驶的汽车为例,VLA架构会首先将摄像头、激光雷达、毫米波雷达等传感器采集的非结构化数据(如图像像素、点云坐标),转化为人类可理解的结构化语言描述(例如“前方50米处路口有行人正在横穿斑马线,左侧车道有货车低速行驶”),再基于语言逻辑进行类人推理(如“需减速至30km/h,保持当前车道,避免超车引发安全风险”),直至最终输出精准的车辆控制动作指令。
这就打破了传统辅助驾驶“感知-决策-执行”的线性流程壁垒,通过语言作为中间载体实现跨模块的语义贯通,从根源上解决了决策可解释性问题。NVIDIA创始人兼首席执行官黄仁勋就表示:“它不仅可以接收传感器输入,并激活方向盘、刹车和加速功能,还可以对即将采取的行动进行推理。”
但目前来看,车企在开发VLA模型时仍面临诸多挑战,主要包括:高质量多模态数据稀缺且标注成本高;视觉、语言与动作三者之间的语义对齐难度大;引入大语言模型可能带来危险的“幻觉”问题;庞大的VLA参数量对车端算力和实时性提出极高要求;从原型到量产还需克服系统集成、推理优化和功能安全等工程落地难题。
NVIDIA推出的VLA推理大模型Alpamayo,面对上述挑战进行了有针对性的部署。但它最具轰动性的看点,还不是模型本身的各种技术突破,而是以此构建“完整的、开放的推理型辅助驾驶生态”的理念。按照NVIDIA的官方说法,Alpamayo并不是直接部署于车端的模型,而是作为大规模教师模型,供开发者调优、蒸馏,成为其完整辅助驾驶技术栈的核心基础。
“这些模型对全世界开放。”正如黄仁勋所说的那样,“如今,NVIDIA正以一种非常独特的方式在我们的平台上打造了前沿的AI模型。我们以完全开放的方式构建AI模型,以便让每家公司、每个行业、每个国家都能参与到这场AI变革中来。”
也正因如此,相较于封闭生态,Alpamayo开源策略可能会更易于聚合主机厂、Tier1、初创企业。例如,传统主机厂无需巨资搭建自研团队,可快速落地高阶功能,聚焦车辆设计与用户体验优化,快速开展差异化功能开发;Tier1可基于开源底座升级系统集成方案,提升产品竞争力;初创企业则无需从零搭建基础架构,可聚焦场景化创新、以轻资产模式突围。而NVIDIA则通过开放模型与数据,构建起“安卓式”开放生态,加速辅助驾驶技术迭代普及。
以开源生态赋能高阶智驾:灵活算力的未来之路

图3:Imagination高级产品市场总监Rob Fisher
敏锐意识到开源策略带来巨大价值的公司,显然不只有地平线和NVIDIA。在与《国际电子商情》的对话中,Imagination高级产品市场总监Rob Fisher表达了同样的看法。
“建立一个由熟悉您技术的合作伙伴和开发者组成的强大生态系统,是确保系统开发顺利进行的关键。”Rob说,集成IP并设计汽车SoC仅仅是一个非常复杂的系统级设计挑战的第一部分,该系统还包含许多软件栈、安全系统以及复杂的交互。这些系统由多个团队开发,并整合了多个需要移植到SoC架构上的产品。因此,“开源绝对是建立这种强大生态系统的一种方式。”
作为一家专注于为移动、汽车和边缘AI等领域提供高性能、低功耗图形与通用计算IP解决方案的企业,过去数十年里,Imagination最为擅长的GPU技术一直是汽车系统中不可或缺的一部分,用于渲染仪表盘、导航和娱乐系统。
在Rob看来,GPU具有大规模并行架构,非常适合运行AI推理或处理雷达/激光雷达数据等大型工作负载,这使得设计人员能够利用灵活、且广为人知的GPU编程模型来处理更多的自动驾驶系统。
他预测指出,未来5-10年内,随着车辆架构的集中化,以及提供更高程度自动驾驶的传感器增多,GPU会支持更多的计算和特定AI加速,汽车行业对GPU的需求将大幅超越传统的图形渲染。由此催生出的通用图形处理单元(GPGPU),也将用以取代难以编程且缺乏灵活性的DSP和NPU系统。
同时,考虑到GPU在自动驾驶处理栈中的应用越来越广泛,工作负载的关键性也在不断提高,这突破了传统技术在实现功能安全系统方面的边界。因此,将故障检测和纠正逻辑深度嵌入架构中,使得故障覆盖率由GPU层级的设计来保证,而不是依赖于软件测试库等系统级技术,会成为今后汽车芯片设计的主流趋势。
结语
若说互联网时代的核心是“洞见人间烟火”,那智能时代的核心就是 “逼近世界的真相”。智能驾驶的未来,并不是对人类驾驶行为的简单模仿,而是要追求超越人类水平。我们赋予机器智能,最终目的也不是让机器更伟大,而是让人类更自由。于智驾而言,当驾驶成为一种选择、而非负担时,人们的时间与心力将得到极大的解放。
责编:Clover.li
THE END
关注“国际电子商情”加小编微信
现已开放地区群,请发送消息【深圳】【上海】【北京】【成都】【西安】到公众号






