 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库自制一款手动拾放表面贴装元件的真空镊子
我经营着一家小型工程公司,专门从事基于表面贴装技术的硬件逆向工程和故障注入工具的设计与制造。我通常每次都会批量生产 10 片
电路板
。不过我确实有一台自动的“抓取-放置”机器,但其设置和校准过程可能会比较耗时。因此,我偶尔也会使用手动的镊子工具。这带来了一套不同的问题。
手动用镊子逐个抓取每块电路板上一百个小小的 0603 和 0402 型
电阻器
和电容器的边缘,这可能会非常困难、令人紧张且耗费时间。在能量饮料的作用下手部颤抖,或者在熬夜搞技术工作后感到疲惫,都会使放置过程变得更加困难。如果镊子倾斜放置可能会导致元件从镊子上滑落,再也找不回来了。
解决这个问题的方法是采用手动真空泵驱动的表面贴装元件拾取与放置设备。市面上有相应的商业设备。然而,功能最强大的设备价格相当昂贵。有一些价格低廉、可充电的手持式设备,但它们的功能并不比实际的镊子强多少,甚至完全无法正常工作。
我在 上看到了一些设计,它们引起了我自行制作的兴趣。我非常喜欢 贡献者 leumasyerrp 的这个设计,但我真的不想再制作一块印刷电路板来控制真空泵电机和电动气动截止阀了。此外,这个设计也没有真空功率调节的功能。
我决定采用这种整体设计,并增加一些现代功能。我将使用一款 Arduino UNO R3 芯片和 MOSFET 分离板来控制电机和截止阀,以避免再制作一块新的
电路板
。除了设计中现有的用于控制截止延迟的电位器外,我还添加了一个额外的电位器来控制真空强度。这最终会非常有用,因为真空电机全速运转时,放置 0402 小型表面贴装元件会非常困难。
操作原理:
在通电时,手动 SMD 抓取和放置装置会确定电位器的位置。这些电位器起到电压分压器的作用,因此其位置可以通过使用 Arduino 的 ADC 通道读取电压来轻松确定。在用户首次按下脚踏开关以放置 SMD 零件之前,真空泵一直处于关闭状态——从而保持工作区域安静。用户按下脚踏开关后,由 Arduino 触发的 MOSFET 会开启真空泵,并允许真空流动,以便抓住 SMD 零件。真空泵的速度(即决定真空压力的参数)基于电位器设置由 PWM MOSFET 控制。
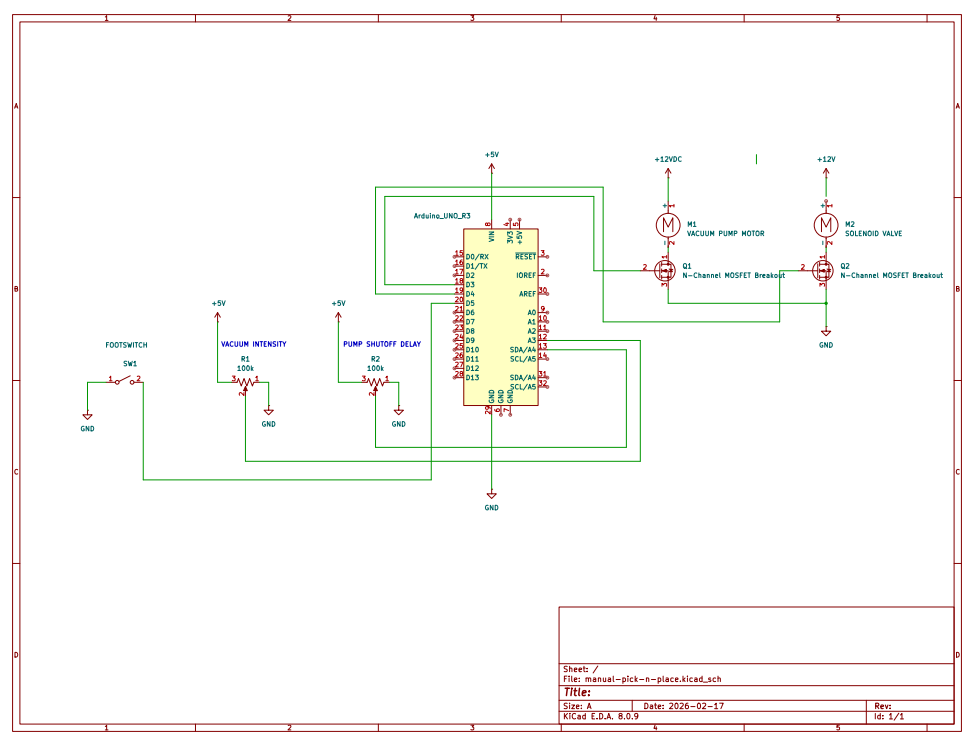
第二个电位器决定了在脚踏开关松开后真空泵持续运行的时间长度。目前,Arduino 软件会将延迟时间设定在 0 到 10 秒之间,然后通过其 MOSFET 来关闭真空泵。
施工说明:
在可能的情况下,对产品尺寸进行测试以及对可能的组件布局进行测试总是很有必要的。正如您在此所看到的,我最初的布局方案与最终的布局方案有很大的不同。
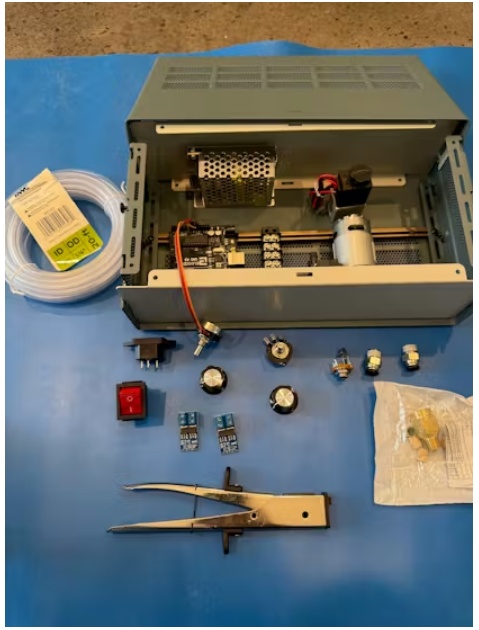
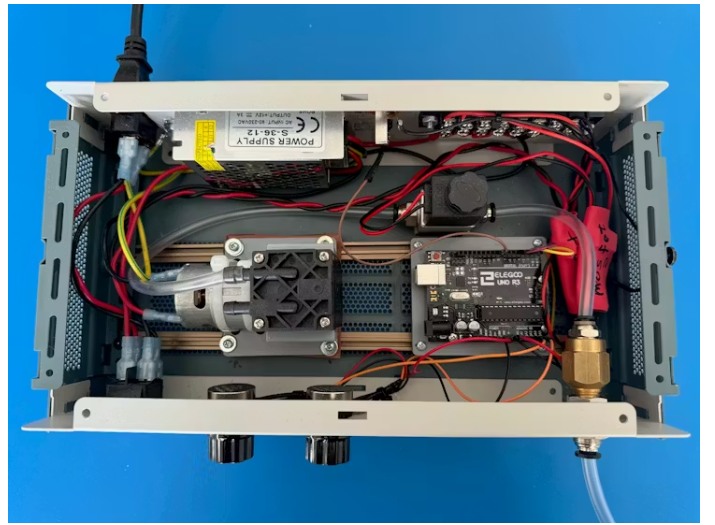
在制作设备外壳的前、后面板时,我首先在 0.1 英寸格纸上绘制出设计方案,以确定电源开关、120 伏电源线面板、电位器安装孔、1/4 英寸单声道电话插孔等部件的安装孔尺寸和位置。然后,我用橡胶胶水将格纸布局固定在前、后面板上。接着,我使用金属切削工具和钻床完成了整个制作过程。

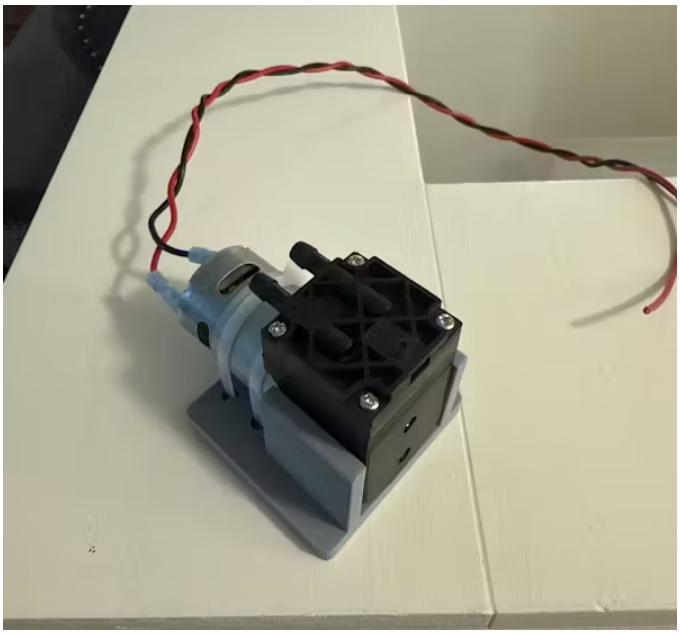
我为真空泵电机、电动气动阀以及 Arduino 接口部件制作了 3D 打印的安装座。在安装真空设备时,我裁剪了一些密封垫材料,将其放置在金属外壳和 3D 打印的安装座之间,以减少振动和噪音。

我没有将 MOSFET 分离板安装上去,而是直接用红色热缩管将它们包裹起来,并给它们做了标记。

我现在想要做出的设计改动有:
韦勒牌的焊头价格相当昂贵。但鉴于我现在所了解的情况,我会自己用一个 SMD 焊膏分配器注射器来制作一个,并将透明软管与之连接起来。
除了后面板的 1/4 英寸脚踏开关连接器之外,我还会在面板的前端添加一个 1/4 英寸单声道插头。有时人们会倾向于将脚踏开关插入设备的前端而非后端。
本文编译自hackster.io





