 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库同时被Science、Nature报道!编织软体机器人,登Science Advances封面
研究背景
刺激响应材料能够将光、热等外界能量直接转化为形变与运动,为构建无系留、自维持软体机器人提供了重要材料基础。相较于传统依赖电机、电池和中央控制单元的机器人,刺激响应软体机器人可通过材料本身的物理反馈实现更轻量、更柔顺和更接近自然系统的运动方式。
然而,现有自维持软体机器人仍受限于单一运动模式、外部刺激编程依赖和复杂环境适应性不足等问题,难以同时实现持续运动、方向调控、结构鲁棒性和功能集成。
关键问题
1、运动方向和地形适应性受限:常规软体爬行或行走机器人通常具有固定的前后方向,其运动轨迹与结构取向强相关,导致全向移动、转向控制和复杂地形通过能力受到限制。
2、柔性结构的力学鲁棒性不足:刺激响应材料可以产生显著形变,但单一薄膜或条带结构往往难以兼顾大变形、整体支撑、抗扰动和载物能力。
3、材料体系与可推广性不足:部分软体机器人依赖特定合成材料或精密加工条件,限制了结构放大、低成本制造和实际应用推广。
新思路
针对上述挑战,加州大学洛杉矶分校(UCLA)博士后陈驰及贺曦敏教授等人提出了一种仿风滚草的球形中空编织软体机器人(Twirlbot)。该机器人由六根光热响应双层条带按照“上下交替”的方式编织而成,形成既相互独立又彼此嵌套支撑的闭合球形框架。
在持续光照下,受光区域的主动层发生光热响应并驱动条带弯曲,惰性层提供弹性恢复力;局部弯曲进一步打破球形结构的力学平衡,使得与支撑面的接触面积减少,从而产生整体滚动力矩。由于球形结构本身不存在固定前后方向,Twirlbot可以通过改变光源方位实现全向移动、路径调控和正趋光性运动。
这一设计的关键并不局限于某一种特定材料,而在于编织结构与环境反馈之间的协同耦合,将材料层面的局部刺激响应放大为机器人尺度的持续运动,并通过球形编织结构赋予系统更高的鲁棒性、适应性和功能拓展空间。
值得注意的是,该工作同时被Science和Nature报道。
Science:https://www.science.org/content/article/scienceadviser-paging-dr-llm;
Nature highlight:https://www.nature.com/articles/d41586-026-01445-4。
技术优势
1、实现恒定光照下的自维持滚动:Twirlbot不依赖电机、电池或复杂电子控制,而是通过材料响应和结构反馈将持续光输入转化为连续运动。
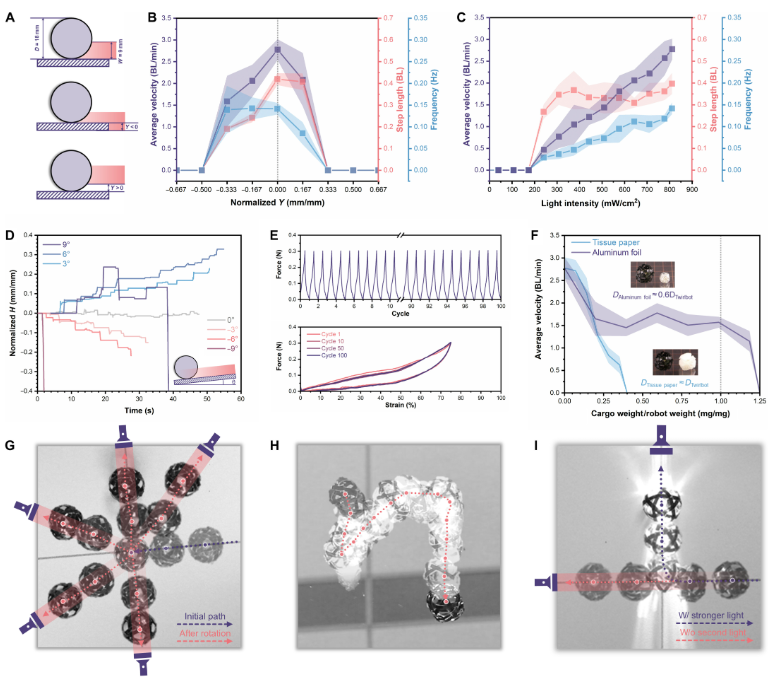
图 Twirlbot的光驱动运动
2、球形结构赋予全向移动能力:无固定前后方向的球形构型降低了运动方向依赖性,使机器人能够在不同光照方位下实现转向、路径调控和正趋光性运动。
3、编织拓扑显著增强结构鲁棒性:相互嵌套的条带网络可在局部变形的同时维持整体支撑,使机器人能够承受踩踏、风扰动和复杂接触环境。

图 Twirlbot在复杂环境中的应用
4、面向真实环境和功能作业:机器人能够在多种粗糙或不规则表面持续滚动,并展示播种、水下运动和布线等任务,体现了无系留软体机器人在环境作业中的应用潜力。
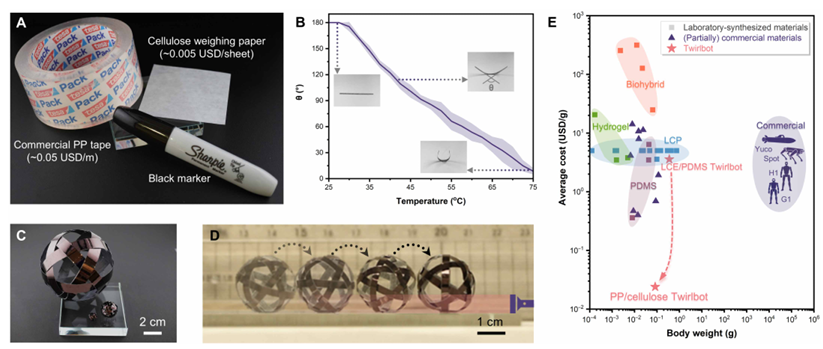
图 Twirlbot的尺寸拓展性与材料拓展性
5、尺寸拓展性与材料拓展性:基于Twirlbot结构的尺寸可以用毫米尺度至分米尺度,甚至更大,只要用于编织的条带参数适合。同时,低成本商业材料也可实现类似功能,而非仅依赖特定材料体系。
展望
Twirlbot展示了一种通过结构智能与材料智能耦合构建无系留、自维持软体机器人的有效策略。其意义不仅在于实现了持续光驱动滚动,更在于证明局部材料响应可以通过编织结构被放大、整合并转化为具有环境适应性的系统级运动。未来,通过优化条带材料、几何比例、编织方式和多刺激响应机制,该类机器人有望进一步拓展至更大尺度、多环境作业、群体协同和自然能量驱动的长期自主运行。
文献详情
Chi Chen, Zhuo Wang, Yuchen Wang, Pengju Shi, Zixiao Liu, Muqing Si, Sidi Duan,Wenhao Hou, Ximin He*, Twirlbot: Tumbleweed-inspired rolling robot. Sci. Adv. 12, eaeb8948(2026). DOI:10.1126/sciadv.aeb8948
论文链接:
https://www.science.org/doi/10.1126/sciadv.aeb8948






