 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库70V电机驱动,一颗芯片就够了?TMC9660:驱动、控制、电源我都包了!
70V
电机
驱动,一颗芯片就够了?
TMC9660ATB+T
驱动 控制
电源
我都包了
做电机驱动的
工程师
大概都有过这样的经历:方案选型时,左边一颗
栅极驱动
器,右边一颗运放做
电流采样
,中间一颗
MCU
跑FOC
算法
,背后还得挂上三五颗
电源芯片
伺候各路电压轨。BOM拉出来一长串,布局设计的时候对着板子叹气——空间又不够了。
TMC9660走的是一条“能塞就塞”的路线。它把
70V耐压的栅极驱动器、硬件FOC运动
控制器
、
电流
采样链路、以及一套完整的
电源管理
单元
,统统塞进一颗9mm×9mm的TQFN封装里。
不是简单拼凑,是真的把原本需要多颗芯片协同才能完成的活,收拢到一颗芯片内部闭环处理。
01栅极驱动与运动控制 都在一颗芯片里“闭环”
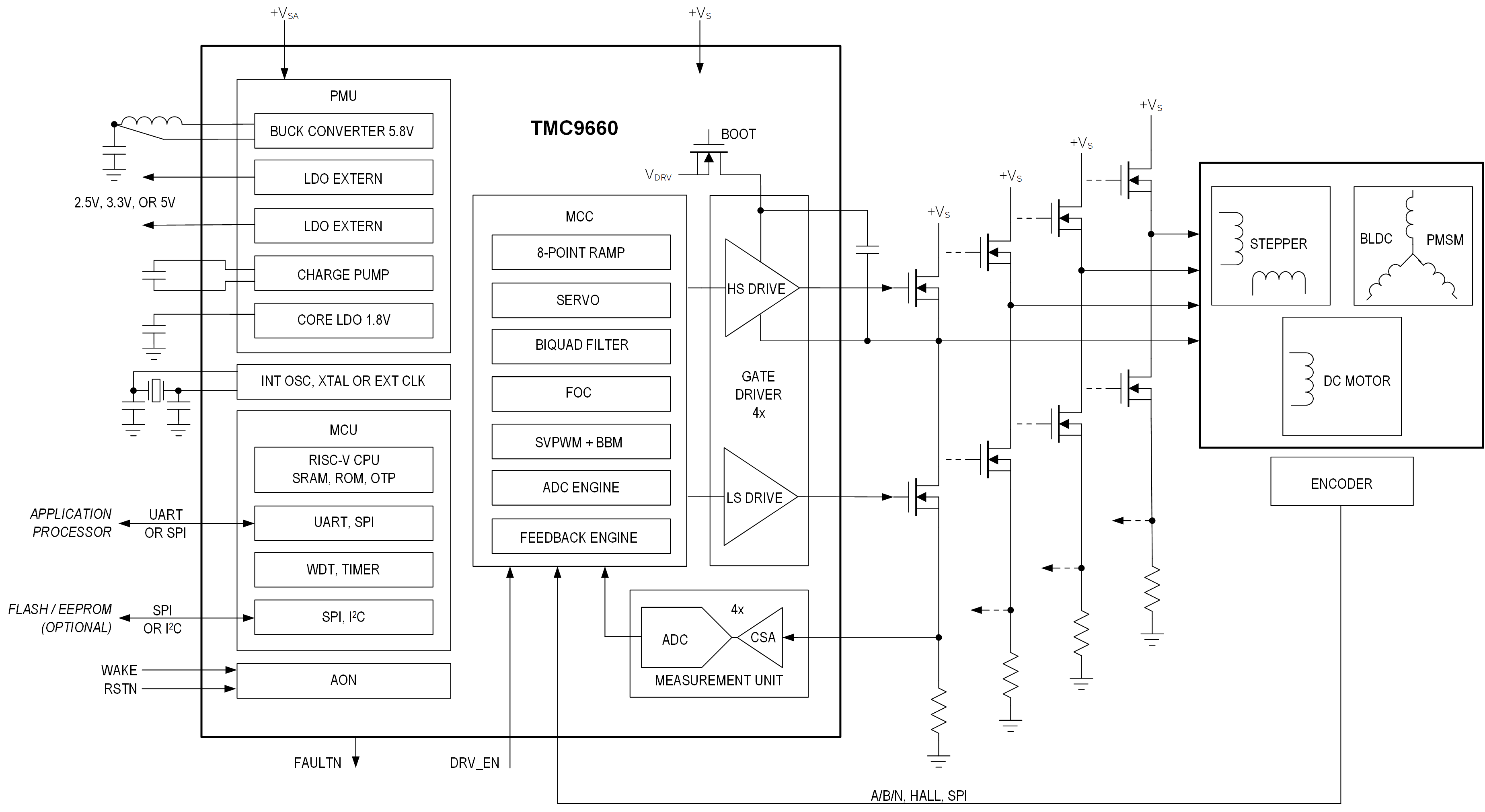
TMC9660内部将功率驱动、运动控制内核和
信号
采样链路高度融合,省去了多芯片级联的中间延迟和板级干扰。
首先是
栅极驱动部分
。内置的三相智能栅极
驱动器
支持可调强度输出,能够直接驱动中低压
MOSFET
。得益于集成的倍压器与涓流
电荷泵
,该驱动器即使在极端占空比下也能维持高边管的稳定导通。
具体驱动和电源参数如下:
参数项 | 规格与说明 |
拉/灌电流能力 | 可调,最高 1A / 2A |
电机电源电压范围 | 7.7V 至 70V (单电源工作) |
内核电源耐压 | 最高 80V |
PWM 占空比支持 | 支持 100% 满占空比输出 |
其次是
运动控制内核
。与纯软件算法不同,TMC9660内部配置了硬件级的磁场定向控制(FOC)单元。电流环、位置环、速度环及扭矩环均在专用硬件中闭环,PWM引擎运行在较高的
时钟
频率下,确保了宽范围的载波调制能力。
核心控制与运算参数如下:
参数项 | 规格与说明 |
PWM 引擎时钟 | 120MHz |
PWM 调制频率范围 | 2kHz 至 100kHz (SVPWM) |
电流环控制方式 | 硬件磁场定向控制 (FOC) |
轨迹规划 | 8 点硬件斜坡发生器 (实时计算) |
最后是
反馈与采样链路
。芯片对电机位置反馈和电流采样的支持非常完备。位置
接口
覆盖了常用的数字增量式和绝对值方案,电流采样则通过内部集成的可
编程
放大器
直接处理底部分流
电阻
信号,减少了外部运放带来的温漂和噪声
耦合
问题。
参数项 | 规格与说明 |
位置 传感器 支持 | A/B/N 编码器 、霍尔传感器、SPI 接口 |
电流采样架构 | 内置可编程 CSA + 内部 ADC (底部分流) |
这种将
模拟
前端、数字运算和功率驱动高度集成的做法,有效压缩了控制环路延迟,使得整个驱动系统在面对负载突变时能够表现出更紧凑的跟随特性。
02给两种开发习惯都留了路
TMC9660内置了一颗
32位/40MHz的预编程微控制器
,它的角色不是替代主控,而是做
驱动层的“专职管家”
。
工程师可以通过SPI或
UART
,用两种方式访问这颗芯片:
低级直接
寄存器
访问
:适合对控制细节有深度定制需求的
开发者
,所有外设寄存器直接可见,像操作一颗传统运动控制
ASIC
一样精细调节每一环参数。
高级参数模式
:面向希望快速部署的场景。主控只需要下发目标位置、速度、扭矩等高层指令,TMC9660内部自动完成FOC运算、环路的闭环调节和PWM输出,把实时性负担从主控肩上卸下来。
初始配置还支持写入
一次性可编程存储器(OTP)
,量产时不用再让主控每次上电都做全套初始化。另外,参数表也可以外挂在SPI Flash或
I2C
EEP
ROM
里,切换不同电机或不同工况时,直接调用预设档位即可。
03电源管理也“包圆”了
通常电机驱动板上的电源树也是一大设计量:驱动部分要
高压
,控制部分要稳定低压,编码器、传感器可能还需要单独供电。
TMC9660内部集成了一套完整的电源管理单元(PMU):
一路
5.8V/600mA
降压转换器
两路可配置
LDO
(2.5V/3.3V/5V可选),每路
150mA
能力
内部
振荡器
+锁相环(PLL),可选外部晶体或时钟输入
自带独立内部振荡器的
看门狗
低功耗休眠模式,支持
唤醒按钮和
定时器
换句话说,这颗芯片不仅驱动电机,还能顺便给板子上的
外部控制器、传感器、编码器芯片供电
。对于空间极敏感的应用——比如电动工具手柄、
机器人
关节模组——这种集成度意味着板级面积和BOM数量都能肉眼可见地往下压。
04一颗平台化芯片 适配的不止一种电机
虽然TMC9660的硬件FOC天然指向PMSM/
BLDC
电机的高性能控制,但它支持的电机类型其实要宽得多:
三相永磁同步电机(PMSM)/无刷直流(BLDC)电机
两相
步进电机
有刷直流电机
对于产品线里有多种电机形态的公司来说,一颗芯片、一套开发环境就能覆盖从高动态伺服轴到简单调速轴的各类需求,这本身就是一种选型上的“收敛”。
应用领域上,官方给出的方向包括:机器人关节与AGV驱动轮、电动工具与园艺设备、工业3D打印与桌面制造、蠕动泵、电动自行车/轻型电动车(LEV)等——基本都是在
有限空间内追求高功率密度和高控制精度
的场合。
05一些值得留意的细节参数
TMC9660的规格表里还有几组数字,对于实际设计选型可能比较有参考价值:
参数项 | 数值 |
连续功耗 | 2412mW |
工作环境温度范围 | -40°C 至 +125°C |
结温 | +150°C |
热阻 (结至环境) | 22.8°C/W |
热阻 (结至外壳) | 0.69°C/W |
封装尺寸 | 64引脚,9mm×9mm TQFN |
热阻数据说明散热路径设计上,芯片底部焊盘与
PCB
铜皮的连接效率比较关键——这是高集成度芯片的标准设计思路,Layout时注意过孔和铺铜即可。
总结
TMC9660的思路很清晰:
不追求在主控里塞更强的算力,而是把算力、驱动、采样和电源做成一个高度内聚的“黑盒”
,让主控只需要告诉它“去哪儿、多快、多大力”,剩下的实时闭环全在芯片内部硬件化完成。
对于正在做电机驱动选型、或是希望压缩BOM与PCB面积的工程师来说,这颗70V智能栅极驱动器,值得放进候选清单里仔细评估。
如果您对TMC9660的技术细节、参考设计或选型适配有任何疑问,欢迎联系
卓联微
,我们的工程师团队可以为您提供进一步的支持与样片申请协助。
电源
电源
+关注
关注
185
文章
18986
浏览量
264562
芯片
芯片
+关注
关注
463
文章
54443
浏览量
469443
电机驱动
电机驱动
+关注
关注
60
文章
1512
浏览量
89680





