 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库【科研动态】60万器件实现单片集成,激光雷达迎来FMCW方案的“硅光时刻”
在
自动驾驶
、
机器人
感知与智能交互飞速发展的今天,三维动态环境的精准测绘已成为机器认知世界的核心刚需。传统激光雷达长期受限于体积庞大、成本高昂、集成度不足等瓶颈,而调频连续波(FMCW)相干激光雷达凭借抗干扰、可直接测速的优势,成为实现真 4D 成像的理想方案,却始终难以实现大规模单片集成与商业化落地。
2026年3月,瑞士Pointcloud GmbH团队在国际顶级期刊Nature发表题为A large-scale coherent 4D imaging sensor的突破性成果,依托45 nm硅光集成工艺,攻克大规模
光电
集成、片上光路由、低功耗探测等多重难题,研发出
全球首款超大规模纯固态相干4D成像激光雷达芯片
,为机器打造出
可量产、微型化、低成本
的 “4D 慧眼”,被 Nature 主编评价为 “令人印象深刻的光电工程成就”。
1 攻坚之路:破解4D成像芯片的三大行业顽疾
研究团队深耕硅光子与激光雷达集成领域多年,直面 FMCW 激光雷达芯片化的核心痛点,历经反复设计、
仿真
与测试,逐一突破技术壁垒。
双站架构瓶颈:
硅光工艺难以集成紧凑光环形器,传统方案采用收发分离的双站架构,不仅占用双倍芯片面积,还存在光路对准难、距离盲区、光串扰等问题,严重限制阵列规模扩展。
大规模光调度难题:
像素阵列扩容至数万级后,传统波导布线损耗剧增、芯片面积失控,如何实现低损耗、
高精度
的片上光寻址,成为超大规模焦平面阵列(FPA)实用化的核心障碍。
功耗与探测距离矛盾:
传统 ToF 激光雷达远距离探测需微焦级脉冲能量,逼近人眼安全极限,难以兼顾高分辨率、低功耗与长探测距离。
团队依托GlobalFoundries 45SPCLO 300-mm硅光工艺平台,结合ANSYS Lumerical光子仿真与
Cadence
Virtuoso电子设计流程,完成
超60万个光子器件与配套电路的单片集成设计
,历经多轮流片与测试验证,最终实现性能与集成度的双重突破。
2 颠覆性创新:四大核心突破重塑激光
雷达技术
格局
2.1 单站像素架构:收发一体,从根源消除对准难题
摒弃传统双站设计,创新采用单站式(monostatic)像素架构,每个像素内集成两组光栅
耦合器
,同一光栅同时承担激光发射与回波接收,配合定向
耦合
器、平衡锗光电
探测器
与片上跨阻
放大器
(
TI
A),实现平衡相干探测,彻底杜绝像素间光串扰,无需光路对准,大幅压缩芯片面积,为大规模阵列集成奠定基础。
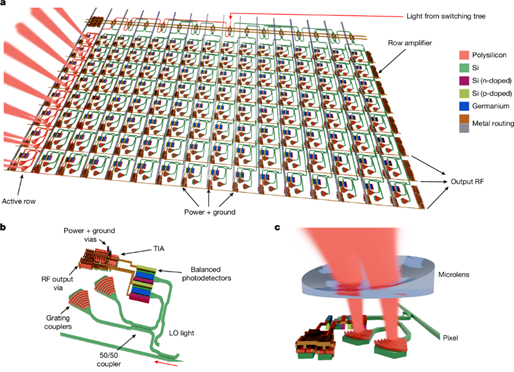
片上集成架构示意:(a)单像素块结构总览;(b)单像素中的单站光路;(c)沉积微透镜结构改善单像素出光收光。(来源:https://www.nature.com/articles/s41586-026-10183-6/figures/2 )
2.2 两级热光开关树:芯片级 “光立交桥”,高效低耗调度
研究团队打造了两级级联热光开关网络,第一级置于阵列外,将光导向512个像素区块;第二级嵌入区块内,精准寻址像素行列,每级开关末端集成监测光电
二极管
,实现自动相位校准。
通过16个光纤输入通道,将开关总损耗控制在4 dB,单次可并行点亮128个像素,支撑3–15 fps高帧率成像,完美解决6万级像素的光调度难题。
2.3 片上微透镜:秒变“可换镜头单反”,灵活适配场景
在芯片表面为每个像素定制沉积凹面微透镜,校正光栅面外发射角,扩束光束以充分匹配商用 SWIR 镜头孔径,消除像差与边缘暗角。仅需更换不同焦距镜头,即可自由切换视场角(FOV)与角分辨率,实现从近距离室内精细成像到远距离户外测绘的灵活适配,打破传统激光雷达
光学
系统固定化的局限。
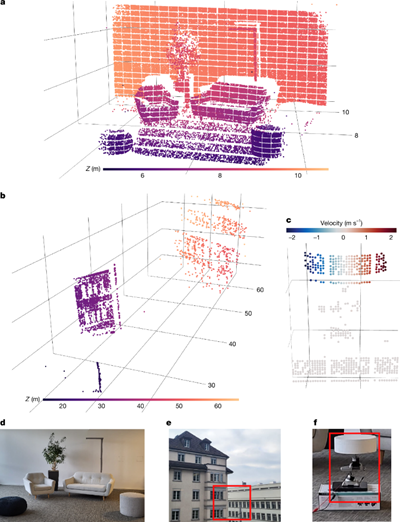
示例点云与实景图:(a)单次采集的办公室场景点云;(b)多次相干平均的远距离建筑点云;(c)附带速度标注的旋转圆盘点云;(d-f)对应的场景照片。(来源:https://www.nature.com/articles/s41586-026-10183-6/figures/3 )
2.4 超低功耗相干探测:46 nJ /点,兼顾安全与性能
采用FMCW相干混频探测体制,利用相干选择性抑制环境杂散光,无需高功率脉冲抗干扰;结合4次低功耗相干平均(单次仅11 nJ),将单点探测能耗降至46 nJ,较此前最优水平降低一个数量级,远低于人眼安全阈值。
同时实现65m探测距离、0.06°角分辨率、3.9mm测距精度、3.0mm/s测速精度,25mm距离分辨率下性能全面达标商业应用标准。
3 硬核性能:创纪录规模,定义 4D 成像新标杆
团队研发的FMCW 激光雷达FPA芯片,核心参数刷新行业纪录:
阵列规模:
352×176 像素,超60万个光子器件单片集成,像素数量为此前最先进水平的5倍,达近QVGA分辨率;
成像能力:
4–65 m全域探测,支持3–15 fps实时4D点云输出,可同步获取三维空间信息与径向速度;
集成度:
全球首个光子器件+ CMOS
控制电路
+
驱动电路
全单片集成的大规模相干FPA,无需外接复杂电子系统;
扩展性:
优化本振功率与波导架构后,SNR可提升5.6 dB,采用Si–SiN混合架构可将探测距离拓展至200 m以上。
4 产业价值:开启4D成像普及时代,赋能千行百业
这款纯固态相干4D成像
传感器
的问世,标志着FMCW激光雷达正式迈入芯片化、低成本、可量产的硅光时代,彻底打破传统激光雷达的应用壁垒,核心应用价值覆盖三大领域:
自动驾驶:
为自动驾驶汽车提供全天候、抗干扰的4D感知,精准识别动态障碍物、测算车速,提升行车安全,替代传统
机械
式与半固态激光雷达,降低车载感知系统成本与体积;
服务与
工业机器人
:
赋予机器人精准空间感知与动态目标追踪能力,实现复杂环境避障、精细抓取,适配物流、家政、
工业自动化
等场景;
消费电子
与AR/
VR
:
微型化芯片设计可集成至
手机
、VR设备,实现空间建模、手势识别、三维交互,推动消费电子从2D成像迈向4D感知升级。
研究团队表示,下一代产品将进一步优化像素排布、提升片上光功率、集成片上光源,最终实现单芯片全集成4D成像系统,体积比肩CMOS
图像传感器
,成本降至消费级水平。
从实验室突破到产业落地,这款大规模相干4D成像传感器,不仅是激光雷达技术的里程碑,更将重塑
机器视觉
生态,让4D感知走进自动驾驶、机器人、消费电子等每一个场景,为智能世界打造一双双精准、灵敏、低成本的“4D 慧眼”。
参考文章:
单片集成
单片集成
+关注
关注
0
文章
11
浏览量
8561
FMCW
FMCW
+关注
关注
9
文章
114
浏览量
24382
激光雷达
激光雷达
+关注
关注
982
文章
4552
浏览量
197113





