 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库大厂入局人形机器人:NXP、瑞萨和兆易创新推出哪些核心MCU方案?
2026年在北京举行的亦庄半程马拉松暨人形
机器人
,荣耀“闪
电机
器人”以50分26秒的成绩打破人类半马的纪录。人形机器人显然已经从瞒珊学步的阶段迈入稳健步伐阶段,开启加速奔跑的新时期。5月14日,在深圳
人工智能
展会上,荣耀展台上闪电机器人也吸引了不少观众到场参观。

针对人形机器人运动能力的大幅度提升需求,动力系统是机器人落地的核心,而驱动关节又是其中的关键,灵巧手也随着人形机器人应用场景复杂度提升带来更高需求,芯片如何驱动硬件升级?
NXP
、
兆易创新
、
瑞萨
给出了不同的芯片和解决方案,本文进行汇总和分析。
NXP推出跨界
MCU
,赋能机器人关节和灵巧手
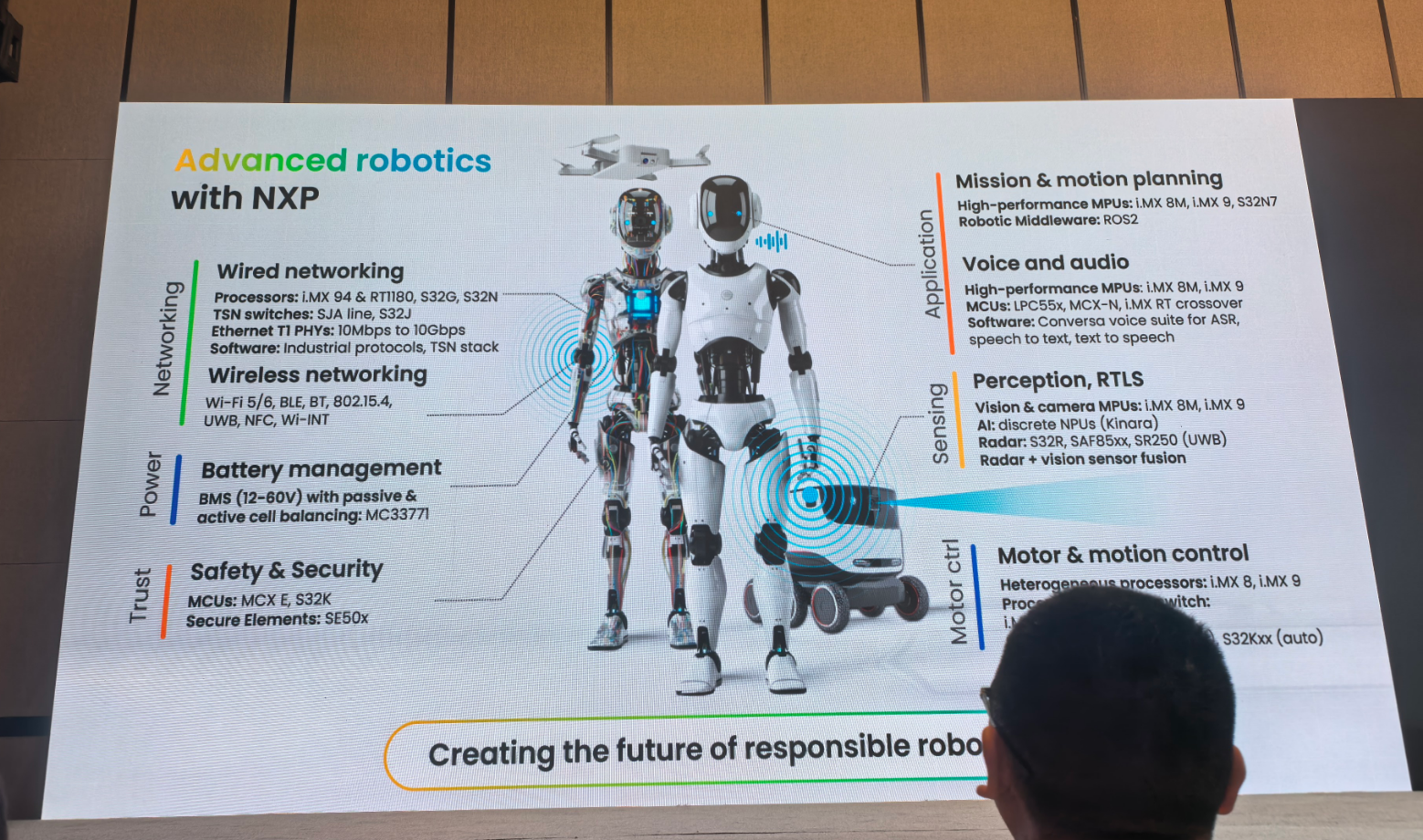
针对不同人形机器人的特点,我们根据模块、应用来分,对机器人的攻击主要来自于
通信
,外部通信包括
网络通信
,内部通信来自
Wi-Fi
5/6、UWB,
4G
。机器人电池的续航也受到业界高度关注。未来还有更多的服务机器人进入家庭,功能安全和信息安全十分重要,用户不希望家庭隐私被外界获取。机器人上面有运动控制、路径规划、还有多
传感器
融合、感知外界,人机对话等等。
NXP作为一家与
电机控制
密切相关的芯片厂商,在电机控制领域有丰富的经验。今天重点介绍NXP在机器人各模块提供的芯片解决方案。
机器人凭借关节的灵活性,可以实现前空翻、后空翻,能抓握东西,能打羽毛球,都是关节在
高精度
的持续控制,人形机器人关节有两大趋势:一、电驱一体化(in
te
grated into one board),传统的机器人关节通常是将电机、减速器、
编码器
、
控制器
等部件分开设计,体积大且协同难。而电驱一体化打破了这种分离式设计,将上述核心部件全部集成到一个紧凑的模块中,形成类似“5合1”甚至“6合1”的一体化关节,高集成度的关节可以减重20%。
当下机器人通讯主要采用
RS485
/
CAN
,传统的 CAN 通信最
高通
常只能支持到 10Mbps,
RS
485 的带宽也相对有限。而未来通信采用100Mbps则意味着机器人内部神经系统的升级,主要通过基于 100 兆
以太网
的 EtherCAT 等工业实时以太网协议来实现,可以实现亚微秒级的同步精度(抖动可控制在 100ns 以内)。
图片为作者拍摄
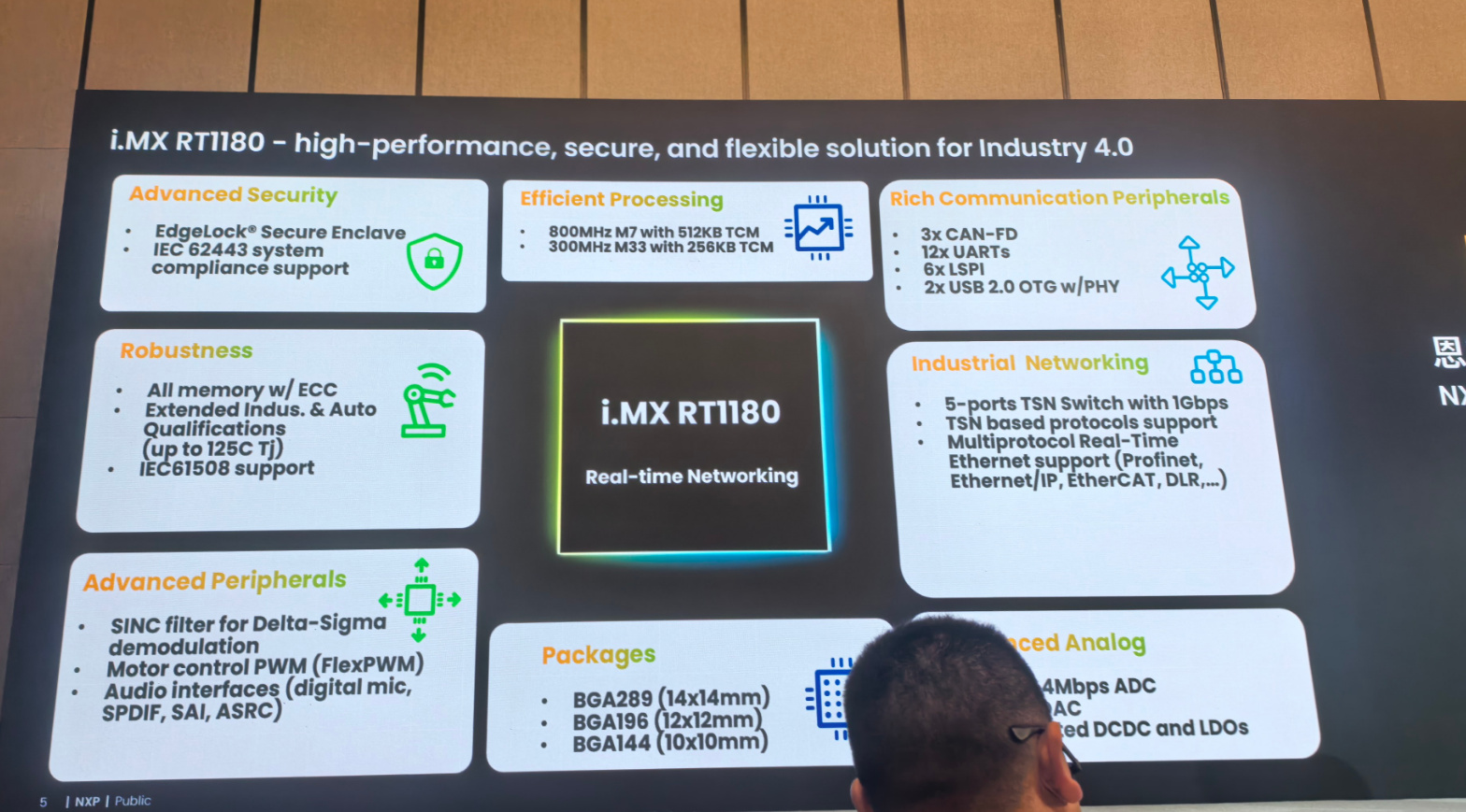
NXP(恩智浦)推出的 i.MX RT1180 跨界
微控制器
,在机器人关节编码器及整体运动控制领域具备非常显著的优势。该控制器采用
Arm
Cortex-M7(高达800MHz)+ Cortex-M33(高达300MHz)的双核架构。Cortex-M7 可以专注于复杂的磁场定向控制(FOC)
算法
和高频编码器数据处理;而 Cortex-M33 则可以负责通信和系统管理,互不干扰,保证编码器数据处理的实时性。实现高性能和实时控制。片上
RAM
为1.5MB。
芯片内部集成了千兆时间敏感网络(TSN)
交换机
和 EtherCAT 从站控制器。高达
5G
bps的
端口
,包括TSN交换机(L2)上的4个端口和TSN端点控制器上的1个端口。
除了支持先进的网络通信协议外,这颗芯片拥有高速的16位
ADC
,内置 EdgeLock® 安全区域,支持安全启动和硬件密钥存储,还支持功能安全。目前,NXP在人形机器人领域主推的是i.MX RT1186,i.MX RT1183、i.MX RT1184。

NXP机器人产品线商务拓展经理陈黎表示,灵巧手具备三大核心特性:1、分布式拓扑或集中式架构;2、当前6自由度,可以拓展到24自由度;3、通信协议,当前支持CAN/RS485,支持EtherCAT,未来支持TSN。
恩智浦展示的集中式拓扑,这是由3 颗 i.MX RT118X 芯片可通过FlexSPI高速互联,实现单芯片控制多路(最高8路)
无刷电机
,覆盖手指20+自由度。手掌RT1180作为EtherCAT主站,与手臂从站及指关节通信,芯片间通过133 兆赫兹 QSPI进行通信。概念验证演示样机将于 2026 年年中推出。
兆易创新
GD32
H7助力闪电夺冠,MCU芯片覆盖机器人全链路
兆易创新在最新投资者关系活动记录表,里面透露一个关键信息,机器人是公司要重点发力的领域,GD32 MCU控制器已经全面覆盖了机器人的手臂关节、灵巧手、通信节点、IMU传感器、编码器等等。
据悉,在北京亦庄举办的人形机器人大赛上,不少机器人采用兆易创新的MCU产品。兆易创新MCU市场部李孝剑强调,兆易创新已与 200 余家机器人厂商建立技术对接,其中超过100家已采用兆易创新的MCU芯片方案。

图片来自兆易创新
近日,在深圳机器人全产业链峰会上,兆易创新宣布,主推产品GD32H75E将EtherCAT®IP、PHY和编码器
接口
等多个高价值BOM器件集成于单芯片之中,可帮助客户减少50%~70%的板级系统成本、缩减40%~60%的
PCB
尺寸,同时降低40%~60%的系统总功耗。
此外,荣耀“闪电”机器人最关键的腿部关节控制单元,搭载了多颗兆易创新超高性能MCU——GD32H7,以极致的算力、低延迟响应与稳定性,支撑起了这场超越人类极限的马拉松征程。人形机器人腿部关节通常具备6个左右的自由度,每个自由度都是一个需要实时响应的关节
控制系统
。
兆易创新GD32H7系列具备以下四大性能:1、搭载 600MHz Cortex®-M7 内核,算力强劲,大幅缩短控制运算周期;2、集成硬件三角函数加速器 ,FPU等专用加速器,使FOC、滤波等算法执行效率更高;3、TCM 紧
耦合
内存 + 高速中断架构,实现极低延迟响应,避免控制滞后;4、高速
AD
C 与高级
定时器
协同,精准匹配跑步动态场景,提升步态稳定性。
GD32H7 系列MCU通过高运算能力与高效数据通路提供支撑,包括内置硬件三角函数加速器 TMU + 滤波加速器 FAC,加快响应速度;高带宽总线与大容量片上缓存,保证多自由度并行计算时数据吞吐不卡顿;2×CAN FD、EtherCAT®+ 2*PHY 通信保证多关节之间超低延迟通信,满足高动态跑步步态的实时性要求。
据悉,兆易创新以 GD32H7、GD32F50x 等系列 MCU 为核心,覆盖人形机器人从灵巧手、手臂到躯干及腿部的关节控制需求。
瑞萨推出人形机器人关节驱动方案
针对人形机器人关节驱动,瑞萨中国方案团队推出了核心采用主频高达1GHz的RA8T2 MCU,支持EtherCAT等多种工业以太网,搭配瑞萨位置传感器(基于PCB线圈的
电磁感应
式,无需额外传感器,体积小巧,适合关节电机轴位置检测),采用双编码器架构(电机轴心+减速机反馈)。功率部分引入最新低压氮化镓方案,功率密度高、开关损耗低、发热小,完美适配机器人关节高密度、小体积需求。
在手指关节里面,瑞萨采用RA6T2系列MCU(支持2-3轴电机驱动,小型QFN封装),搭配单芯片HVPAK功率器件。该HVPAK集成了6个
MOSFET
、
驱动电路
、
电流检测
及保护功能,体积仅4×4mm,且硬件可定制化,极大简化了
PCB设计
。
mcu
mcu
+关注
关注
147
文章
19222
浏览量
405083
NXP
NXP
+关注
关注
61
文章
1413
浏览量
199515
人形机器人
人形机器人
+关注
关注
7
文章
1092
浏览量
18568
兆易创新
兆易创新
+关注
关注
24
文章
733
浏览量
84242





