 五度妙笔
五度妙笔 企业透视镜
企业透视镜 API商城
API商城
 数据库
数据库虹科动态 | 2026年6月精彩回顾
全球
机器视觉
技术企业Pleora团队、德国运输冲击监测领域AS
PI
ON团队等重要合作伙伴来访;安宝特与Decisyon达成战略合作并发布拓影Twyn 2.6新品,虹科BNC+ NVH诊断套装升级,宏集MSR数据记录仪入选全球冲击数据记录仪市场TOP15等。本月我们还举办了
8场直播
+
2场重要研讨会
、参加了
5场行业
知名
展会
。
下面让我们一起回顾
6月的虹科动态吧!
01
虹科动态
1
合作交流
2026 年 6 月 5 日,
友思特
(Viewsitec,虹科姐妹公司)长期战略合作伙伴、全球机器视觉技术企业
Pleora 团队
到访友思特北京分公司,这是双方时隔一年的第二次线下会面。Pleora CEO
Anis Hanna
、亚太区销售负责人
Brian Chi
、技术工程师
Harkin
一行,与友思特销售负责人
李康宇
开展全方位座谈,并共同赴合作客户
北京信息科技大学
仪器科学与
光电
工程学院实地走访交流。本次双向沟通,为夯实、升级双方战略合作奠定重要基础。

友思特动态|友思特伙伴Pleora再度访华,深化机器视觉战略合作
2026年6月22日,德国
ASPION
团队的
Martina
(董事总经理)和
Michael
(CEO&创始人)到访
宏集科技
(hongrax,虹科姐妹公司)交流。作为宏集在运输冲击监测领域的重要合作伙伴,ASPION此次来访不仅进一步深化了双方的合作关系,也为未来共同推动高价值设备运输监测技术在中国市场的发展创造了新的交流契机。双方围绕
产品应用、市场发展及行业趋势
等话题展开深入探讨,共同探索运输数字化与风险管理的新机遇。

宏集动态 | 德国ASPION团队到访广州总部,共话设备运输监测新机遇
2
合作建立
工程数据利用与现场执行数字化解决方案提供商
安宝特
(Arbig
te
c,虹科姐妹公司)宣布与美国软件公司
Decisyon
达成战略合作,正式将其
AI
驱动的制造运营管理平台引入中国市场,帮助制造企业在统一工作流中实现实时决策与高效执行。
安宝特新闻丨安宝特与Decisyon正式建立合作伙伴关系
3
品牌动态
虹科CEO
陈秋苑女士
带领虹科探访全球农业
机器人
标杆企业
极飞科技
,深入了解其全链条、全自主农业装备的技术体系,重点探讨农业导航技术的发展现状与行业挑战,并分享
德思特GNSS
模拟
器
在农业机器人导航性能验证中的核心价值。
从靠天吃饭到科技种田,虹科与极飞科技聊聊农业
无人机
不迷路的 "硬核底气"
4
产品方案
6月11日,国际市场研究机构
Spherical Insights & Consul
ti
ng
发布《
全球冲击数据记录仪市场15强企业:行业情报报告(2026–2035)
》。凭借在冲击、振动、温湿度监测领域的持续创新与专业积累,
宏集MSR数据记录仪
成功入选全球冲击数据记录仪市场TOP15企业榜单。

权威认可 | 宏集MSR数据记录仪入选全球冲击数据记录仪 TOP15 企业榜单
国内某头部
AGV机器人制造商
,在大型金属厂房与复杂电磁环境中面临
无线通信
稳定性挑战。
德思特
(Tesight,虹科姐妹公司)
Pano
ram
a工业级
天线
方案
以4×4 MIMO架构、IP69K防护及多频融合设计,成功支撑其客户完成北美工厂规模化部署,为智能制造构筑坚实
通信
底座。
德思特工业级天线方案:助力头部AGV制造商成功打造北美超级工厂标杆项目
友思特
提供机器人深度视觉方案。依托友思特
Stereolabs ZED双目相机
,解析主流深度成像技术原理,攻克
动态场景、三维重建、复杂光照适应性
等核心难题,搭配开源工具链实现软硬件协同开发,已在
工业自动化
、移动机器人等场景形成成熟落地案例。
友思特方案|搭载 ZED 系列双目相机,友思特深度视觉赋能具身智能,助推人形机器人产业化落地
艾体宝
(itbigtec,虹科姐妹公司)的
Arango AutoGraph
能在 Arango AI 上下文数据平台中自动从企业分散的多源数据里
识别实体、关系与知识域,构建语料图谱并按域自动匹配图检索、向量检索
等策略,无需人工设计本体与配置。
产品主要通过
统一企业知识库与 AI 助手、多智能体协同、运维知识管理、大型企业统一知识治理
这四个场景,以及
AutoGraph 具有解决跨域检索混乱、Agent 信息割裂、故障线索分散及数据孤岛
等方面的应对机制与实际落地价值。
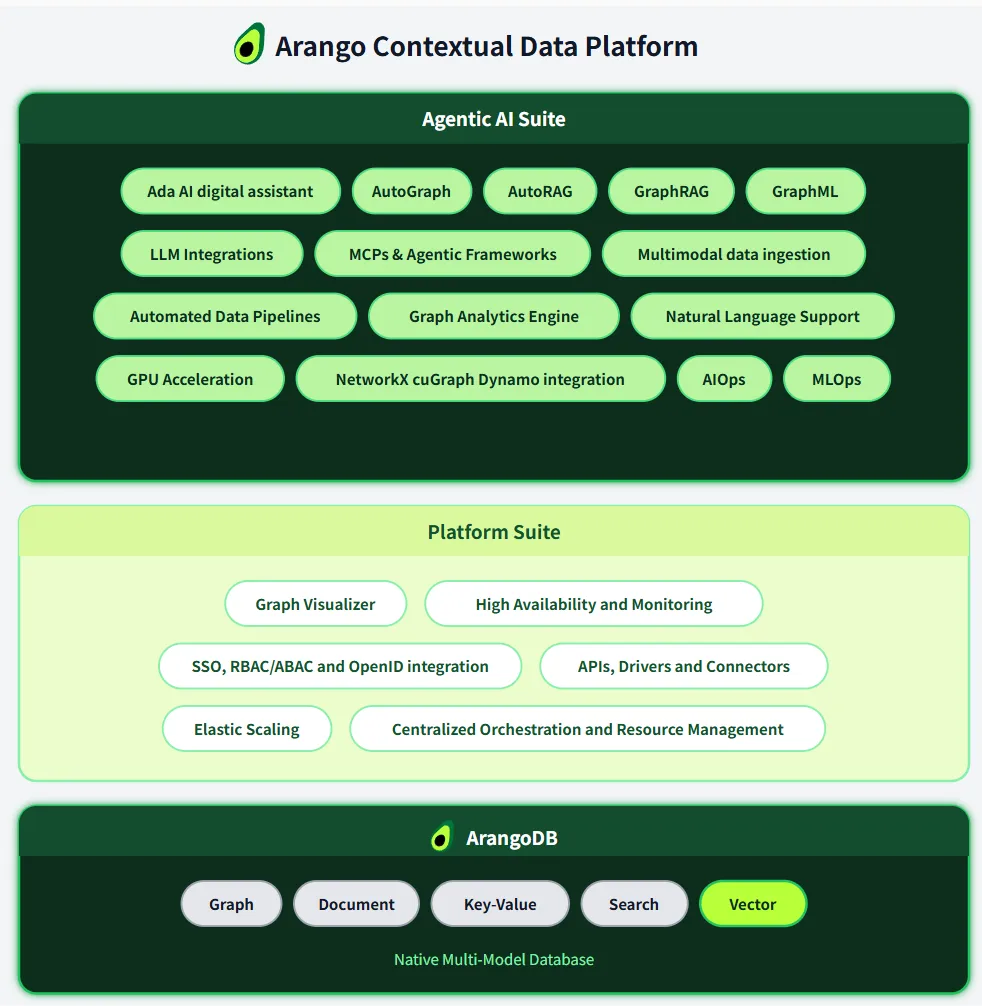
艾体宝产品 | Arango AutoGraph如何重构企业的知识图谱?
5
新品发布
安宝特近日发布
拓影Twyn 2.6
最新版本信息。作为面向工业制造场景的
移动式 AR 质量检测系统
,拓影Twyn 可将
CAD 模型、数字孪生与实物部件
进行现场叠加比对,帮助质量人员在
车间、仓库、装配现场或交付前
快速发现部件是否存在
缺料、错装、漏装、位置偏差
等问题。
安宝特新闻丨发布拓影Twyn2.6:让工业现场AR质检更快、更灵活、更易追溯
虹科新品
BNC+ NVH诊断套装
全新重磅升级!,重磅升级
三轴合一系统
,让您能以更少的通道同时测量更多方向的振动,以更低的成本拥有NVH问题精准诊断能力!助您
降本、提效、少返修
!
虹科新品 | 重磅升级!全新NVH振动异响诊断套装登场!
02
精彩回顾
1
活动现场
上划查看更多
深圳工博会圆满收官|宏集AI工业解决方案引发广泛关注
虹科邀您共赴2026
MathWorks
中国汽车年会,最新版
CAN
XL方案惊喜亮相
点成邀您共赴CPHI & PMEC China 2026上海制药
机械
展
亚洲物流双年展圆满收官|宏集科技以数字化方案赋能智慧物流与运输安全
展会回顾 | 【北京机器视觉展】友思特诚邀您回顾精彩瞬间!
2
直播回顾
上划查看更多
德思特直播回顾
GNSS系列直播
测试初探:GNSS模拟器与软件定义架构原理
常规应用实战:全球定位、动态轨迹与多场景模拟操作
测试测量
系列直播
任意波形发生器(AWG):从通用测试难题到前沿科研的复杂
信号
生成
重塑
仿真
边界:Skydel 软件定义架构下的 API 自动化与极速开发实战
艾体宝直播回顾
Mend AI
直播回顾 | 当AI嵌入研发全流程,Mend.io如何构建安全闭环?
Redis
直播回顾 | Redis如何成为智能驾驶时代的实时数据中枢?
康谋直播回顾
1W+观看、1000+人同屏!这场智驾仿真直播的20+个干货Q&A来了!
安宝特直播回顾
直播回顾 | 特征转换支持哪些格式和特征?现场Q&A精华都在这
3
精选案例
26年6月5日,在中国台湾地区主管部门、公益组织与技术伙伴跨界合作下,价值约人民币110余万元的远程医疗设备(含Vuzix M400 AR智能眼镜)捐赠落地
宜兰、台南、台东
等地偏远医疗机构,用于
远程诊疗与专科支援
。
安宝特作为AR技术合作伙伴,提供
第一视角实时视频传输的穿戴式解决方案及落地培训
,协助远程专科医生同步掌握现场情况,提升偏远地区医疗可及性。
安宝特案例丨AR智能眼镜走进偏远地区医疗一线,Vuzix M400助力远程专科支援

随着增强技术引入“
星-地-网-端
”协同生态,GNSS模拟器在消除实地测试成本、验证
算法
完备性及评估极限安全场景中具备不可替代的价值,德思特自研
GTS P7
支持导入
高动态、高阶次
的轨迹文件(如高烈度机动、车辆颠簸等),并可同步产生
定量、定姿、定时
的干扰
射频
信号,是评估安全级终端抗干扰与防欺骗能力最高效、安全的测试手段。
德思特干货 | 卫星导航增强技术全景解析与
高精度
仿真验证


虹科作为
瑞士ELPRO
在中国的独家合作伙伴,提供了ELPRO LIBERO系列PDF温度记录仪的专业选型指南,围绕
一次性或多次使用、温区覆盖及数据传输方式
三个维度梳理了各型号的适用场景与特点。针对不同需求(如出口冷链、干冰运输、实时远程监控等)提供
快速选型速查表
,并说明了全系列产品
具备GAMP 5验证、FDA合规、IATA航空运输
认证
等医药级合规保障。
虹科干货 | ELPRO LIBERO 温度记录仪专业选型指南
03
活动资讯
研讨会
/宏集

6月11日,宏集科技与全球知名纺织
机械制造
企业
卡尔迈耶(KARL MAYER)
联合举办“
数智赋能·协同致远
”深度
技术交流
研讨会。双方围绕工业互联网、智能制造、设备数字化以及工业云平台应用等话题展开深入探讨,共同探索数字技术赋能制造业高质量发展的创新路径。
宏集动态 | 卡尔迈耶 × 宏集科技:深度技术交流研讨会成功举办
虹科线上
论坛
直播
/虹科
本次《
智能移动机械智能化与网联化高端国际论坛
》线上直播顺利收官!本次直播聚焦
非道路工程机械、矿机、农机整车网络、CAN XL新一代总线、无人化具身智能
核心赛道,汇聚 CiA 协会、
博世
、威卡、易控智驾等行业权威嘉宾,深度
拆解
移动机械网联升级痛点与落地方案,吸引工程机械、车载电控、矿山智能化领域百余位研发、管理负责人在线观看交流。
直播回顾|智能移动机械智能化与网联化高端国际论坛圆满落幕!完整回放 + 讲师课件全部开放
虹科系列课程
/虹科
虹科LIN总线培训
虹科LIN总线培训,由CiA协会特邀讲师亲授,从
物理层到UDS诊断全流程系统化教学
,理论与实操结合,带你吃透LIN总线通信与诊断技术!
虹科培训 | LIN总线培训,从物理层到UDS诊断全流程教学
AUTOSAR汽车开放系统架构系列课程
AUTOSAR汽车开放系统架构系列课程正式上线!
体系化理论讲解+架构拆解
,帮你彻底理清架构与分层逻辑;
工具实操训练+项目级配置演练
,带你完整走通开发链路。从0-1深度实操教学,实现从
“理解规范”到“项目落地”
的完整能力闭环,带你掌握汽车软件开发的核心技术!
机器视觉
机器视觉
+关注
关注
168
文章
4891
浏览量
127543
NVH
NVH
+关注
关注
2
文章
91
浏览量
10993
虹科电子
虹科电子
+关注
关注
0
文章
820
浏览量
15545





