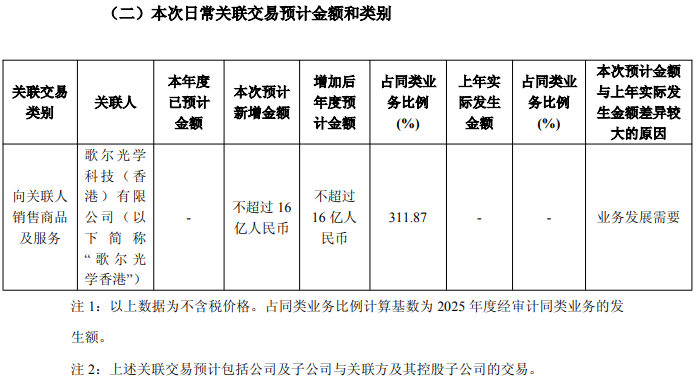
5月27日,视涯科技(688781)发布日常关联交易公告,公司拟向关联方歌尔光学香港销售商品及服务,全年预计交易金额不超过16.00亿元。公告显示,视涯科技股份有限公司(以下简称“公司”)于2026年5月27日召开了第二届董事会审计委员会第九次会议,审议通过了《关于新增2026年度日常关联交易预计的议案》。同日,公司召开了第二届董事会独立董事第六次专门会议,审议通过了《关于新增2026年度日常关联
数十年来,咨询行业一直由少数巨头把持,其中既有麦肯锡、贝恩、波士顿咨询集团(BCG)这类顶尖战略咨询公司,也有德勤、安永、毕马威、普华永道四大会计师事务所的咨询部门,以及埃森哲(176.36, -0.64, -0.36%)等技术落地服务巨头。这些企业均拥有大批初级顾问,可在全球各地承接大型项目。 人工智能正首次打破这种行业垄断,也为资金充裕的新晋竞争者打开了大门。这项技术瓦解了老牌巨头的核心优势—
三星电子员工表决通过一项具有里程碑意义的利润分成协议。受益于存储芯片业务的蓬勃发展,该部门员工人均奖金预计接近40万美元。 这份协议于周三获得通过,工会74%的成员投下赞成票。至此,这家全球最大存储芯片厂商围绕人工智能热潮带来的巨额收益如何分配,持续数月的劳资纠纷终于落幕。此前工会曾放话,若双方无法达成一致,将发起罢工。 根据协议,旗下7.8万名半导体员工可分得公司营业利润的10.5%。据韩国KB
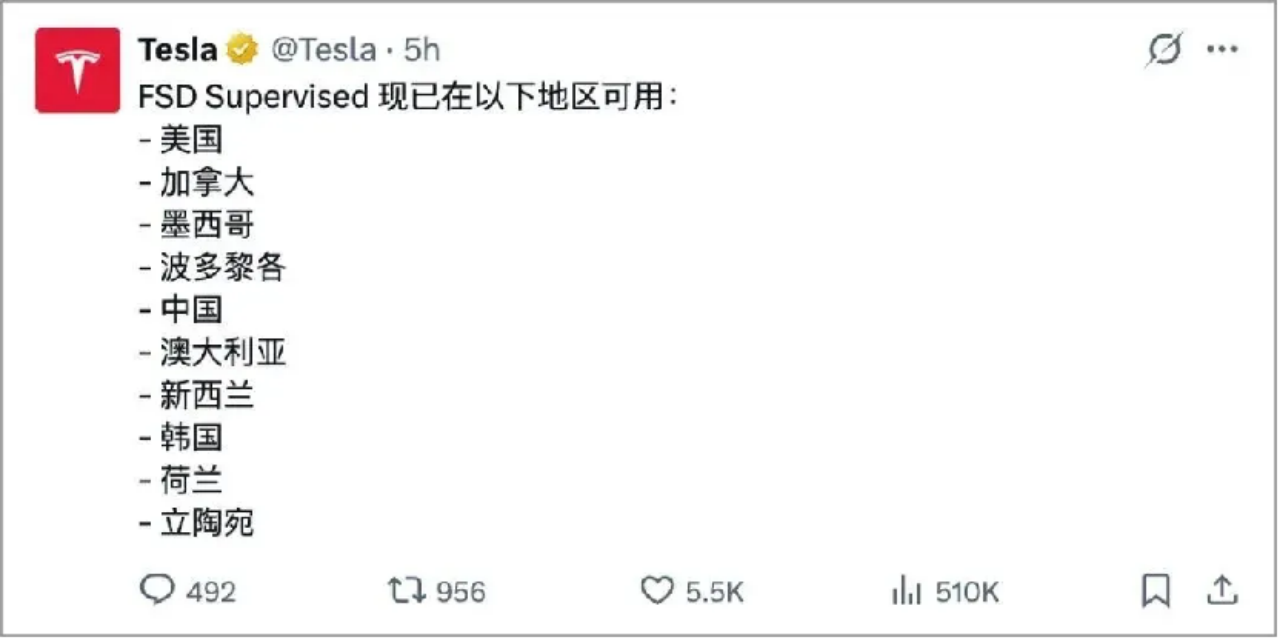
“特斯拉监督版FSD入华”的词条,又一次登上媒体热搜。起因并不新鲜:特斯拉在官方渠道公布了其监督版FSD的最新布局,其中明确写道——中国也已开放使用。尽管这次和以往每一次一样,一切远未最终落地,特斯拉目前仍在按照国家法规要求推进审批流程,特斯拉中国官网没有发布任何一条与“FSD监督版登陆中国”相关的新公告。但舆论不等人。市场上已迅速形成“即将可用”的强烈预期。社交平台乃至部分媒体,都开始热议FSD
27 日(今天)下午,据彭博社援引知情人士消息称,字节跳动目前正在讨论今年最高 700 亿美元(注:现汇率约合 4759.09 亿元人民币)的支出计划,主要用于建设数据中心和其他 AI 基础设施,相关资金很大一部分将来自字节跳动 2025 年约 500 亿美元(现汇率约合 3399.35 亿元人民币)的利润。 知情人士表示,目前这些支出数字仍属于初步方案,并且至少会按季度调整,因此最终规模未来仍可
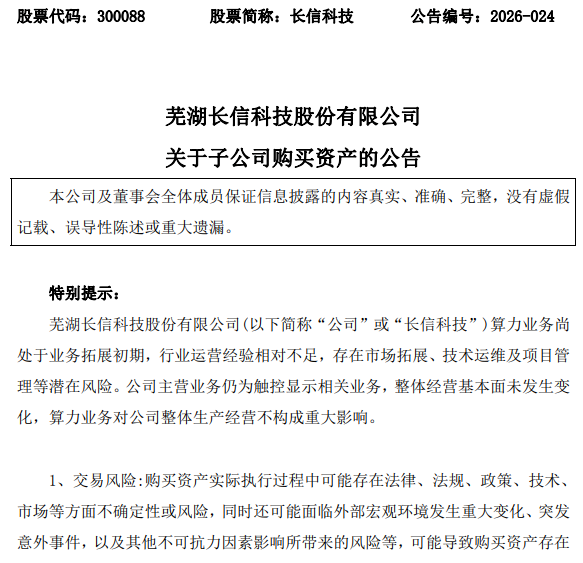
5月27日晚间,长信科技(300088)发布公告称,公司子公司芜湖长信智算科技有限公司(以下简称“长信智算”)根据经营发展需要,拟向多家供应商采购服务器,并签署相关采购合同,采购合同总金额预计不超过30亿元。公告显示,长信智算购买服务器主要用于为客户提供算力服务,本次交易不构成重大资产重组亦不构成关联交易。资料显示,长信智算成立于2025年5月,是长信科技布局算力赛道的核心主体,其业务范围涵盖算力
谁说退休只能带娃、公园遛弯?今年夏天,泰康之家给你另一种答案——“2026云上乐泰全国巡展活动”重磅来袭!5月16日,首站“乐享生活——50岁+百人瑜伽大会”在北京大吉巷火热开场,百位长辈在蓝天绿草间舒展身心。6-8月,美妆体验、摄影课堂、舞蹈互动、潮流音乐派对……每周都有惊喜,以全新场景探索享老生活方式无限可能!可看、可学、可玩:从线上到线下,让好内容触手可及随着社会老龄化程度不断加深,新时代的
2024年1月,Anthropic的年化收入只有8,700万美元;到2026年5月,这个数字据称已经接近450亿美元。 据科技媒体The Information 5月27日报道,Anthropic近期年化收入接近450亿美元。OpenAI当前运行率未被直接确认,但The Information估算其约为330亿美元。按这一口径,Anthropic年化收入已比OpenAI高出至少35%。 这里的"年
一场由数据猿与上海大数据联盟联合发起的“客服系统”选题策划活动正式拉开帷幕,面向全行业征集创新案例与深度观点。随着AI Agent技术加速渗透企业服务领域,客户服务部门正经历从“成本中心”向“价值枢纽”的范式转变,这一变革成为本次策划的核心探讨方向。在2026年的企业服务生态中,AI技术已突破工具属性边界。领先企业通过AI实现客户生命周期价值提升、商机转化率增长等量化收益,而传统企业仍困于工单系统
科技巨头meta近日宣布对旗下AI产品策略进行重大调整,从依赖广告收入转向探索付费订阅模式,试图在社交应用领域开辟新的盈利渠道。这一举措涉及Instagram、Facebook、WhatsApp三大平台以及meta AI服务,标志着该公司正式进军付费社交服务市场。针对普通用户,meta推出三项Plus订阅服务:Instagram Plus和Facebook Plus定价均为每月3.99美元,Wha
近日,科技媒体披露了一则重磅消息:亚马逊向美国联邦通信委员会(FCC)提交的文件显示,其将以116亿美元(约合人民币788.65亿元)收购卫星运营商Globalstar,并接手苹果公司此前持有的20%股权。这一交易标志着全球科技巨头在卫星通信领域的布局进一步深化,也引发了行业对未来低轨卫星服务竞争格局的关注。据文件内容,苹果公司为支持iPhone的“卫星紧急求救”功能,曾于2022年通过11亿美元
硬氪获悉,近期,航墨科技完成由中投万方、三贤科技、北航天汇投资的数千万元天使+轮投资。此次融资主要用来产品研发和市场推广。公司创始人代万辉是北航机器人所硕士、清华大学MBA,曾任北航机器人所863项目负责人,曾负责家用康复器械新零售业务,打造的“械药联动”新模式用户数过千万。CTO栾胜是北航博士及博士后,意大利博洛尼亚大学访问学者,长期从事机器人模组、医疗健康领域机器人及AI技术的研究。代万辉介绍
最近外网著名社交媒体平台“X”上面AI动画圈又玩出了新花样:现实天空直播里突然闯入二次元角色,手持第一视角、一镜到底、带完整直播UI,既搞笑又有病毒传播潜质。 最有名的就属Eris Create Lab这位博主的动漫少女最有名了,于是我借用了Eris的想法,并将其带向天空。这是GPT Image 2 + Seedance (˶ᵔ ᵕ ᵔ˶) ‹3(同样用故事板技术)😚 温馨提示:完整版提示词在文
在人工智能技术深度渗透各行业的当下,通信运营商正经历着前所未有的转型挑战。传统语音通话、流量套餐等业务增长乏力,而AI技术催生的新需求却呈现出爆发式增长态势。如何将网络优势转化为智能服务能力,成为行业破局的关键。广东移动近期推出的三大战略行动,通过重构服务模式、升级基础设施、创新商业模式,为运营商转型提供了新范本。个人通信服务正经历智能化蜕变。针对用户对通话质量的新要求,广东移动推出的"AI静谧通
优刻得-W(688158.SH)近日宣布与华中科技大学正式建立产学研合作关系,双方将针对Agent场景下大模型推理面临的技术瓶颈展开深度探索。此次合作以KV Cache卸载与复用技术为核心研究方向,旨在通过系统级创新为下一代AI推理基础设施提供突破性解决方案。研究团队将整合云基础设施架构、分布式存储优化及异构计算加速三大领域的专业能力,从技术实现路径上构建双维度突破。一方面聚焦"单请求长上下文推理
AI报告
电话咨询
在线咨询
 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库