牡丹花,是花。牡丹花形状的馒头,也是“花”,而且能卖到88元一朵。河南安阳的张女士在网上分享了自己手作的牡丹花造型馒头,花瓣层层叠叠,颜色粉嫩欲滴,宛如真花。网友看后惊叹:“这如果是馒头而不是真牡丹,我全吃了。”张女士说,视频走红后,收到了来自全国各地的点赞,“我很开心,我们河南安阳的花馍终于被大家看到了。”张女士是一名90后,做花馍生意已经三年,师从专业的传承老师。做一个牡丹花造型的花馍,她需要
快科技5月28日消息,在今日举行的蔚来ES9媒体见面会上,蔚来创始人、董事长、CEO李斌与妻子王奕芝候场一幕引发关注。 社交平台上,李斌妻子王奕芝晒出了两人候场的画面,并配文“有些美好的仗,我们一起打”。 视频画面显示,在候场时,李斌妻子王奕芝小跑上前,她与李斌两人边走边互相搂腰鼓励,尽显夫妻同心与恩爱。 这一温馨画面迅速引发网友热议,不少网友留言称赞 “夫妻同心,其利断金”“最好的并肩作战莫过于
快科技5月28日消息,研究人员近日发现一种名为FROST(基于OPFS的SSD时序远程指纹识别)的新型追踪技术,网站只需访客打开一次页面,就能推断其正在浏览的其他网站及设备上运行的应用程序。 该技术利用浏览器内置的OPFS(源私有文件系统)文件系统执行JavaScript脚本,持续采集固态硬盘I/O延迟数据,全程无需用户进行任何操作。 攻击过程中,恶意网页会生成1GB甚至更大体积的OPFS文件,反
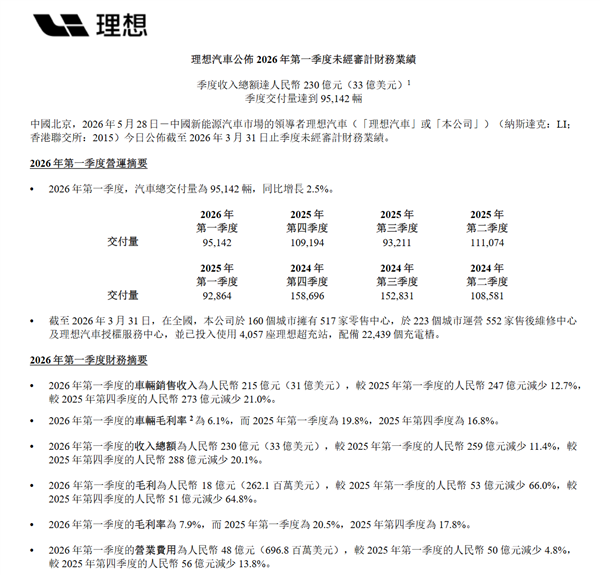
快科技5月28日消息,理想汽车今日公布2026年第一季度财报。 财报显示,理想一季度收入总额230亿元,同比下降11.4%,环比下降20.1%。其中车辆销售收入215亿元,同比下降12.7%,主要因产品组合变化导致平均售价降低。销量上,理想一季度交付量95,142辆,同比增长2.5%。 盈利方面,一季度毛利率7.9%,去年同期为20.5%,上季度为17.8%。车辆毛利率6.1%,去年同期为19.8
快科技5月28日消息,据报道,近日,美国佛罗里达州帕斯科县发生一起致命交通事故,一辆特斯拉Model Y在Autopilot辅助驾驶模式下失控,最终造成87岁驾驶员死亡、75岁女性乘客受伤。 据佛罗里达州公路巡警通报,事发路段为无限大道东侧立交桥路,路面笔直且仅含平缓左转弯道,限速30英里/小时(约48公里/小时)。 涉事车辆行驶中突然偏离车道,先后撞击路边配电箱与池塘水域,车辆随后沉入水中。 救
快科技5月28日消息,上汽集团今日下午在上海交付第1亿辆车,成为中国汽车工业史上首家累计产销量突破1亿辆的汽车集团,也是全球第八家达成这一里程碑的车企。 上汽集团前身为1955年成立的上海市内燃机配件制造公司,1958年试制出第一辆凤凰牌轿车,1964年更名为上海牌轿车。 1983年,第一辆国产桑塔纳下线,开启合资造车时代。 2015年,上汽与阿里巴巴联合推出荣威RX5,打造全球首款互联网汽车。
快科技5月28日消息,据国际知名科学技术新闻网站scitechdaily报道,5月20日发表在国际顶级心血管期刊《欧洲心脏杂志》的一项针对超过 11.2 万人的研究显示,加工食品中常用的防腐剂可能会增加高血压和心血管疾病的患病风险。 数十年来,食品防腐剂帮助超市货架保持充足库存,延长了从包装面包到加工肉类等各类食品的保质期。但最新研究表明,这些广泛使用的添加剂可能带来意想不到的代价,即更高的高血压
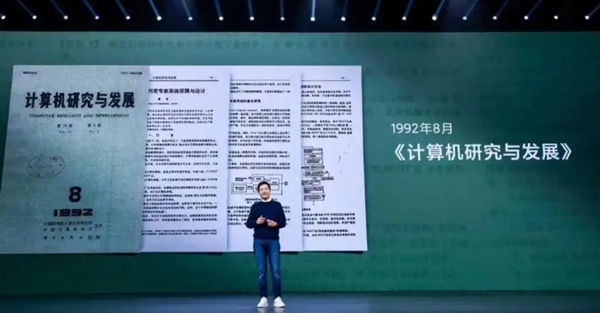
快科技5月28日消息,据报道,34年前,小米创始人雷军发表的学术论文,竟在当下AIGC检测系统中被判定为AI率超标,部分平台数据远超高校合格标准,这一荒诞结果直指当前AI检测技术的严重缺陷。 随着多所高校出台毕业论文AIGC检测新规,这类技术的局限性愈发凸显。 缺乏公认行业标准、算法不透明,导致同一文本在不同平台检测结果差异巨大。 雷军1992年发表的论文,在四款主流平台检测中,AI率从0%到23
快科技5月28日消息,加拿大政府推动Bill C-22《合法调阅法》草案,强制要求数码服务供应商在加密系统中开设后门供执法部门调阅,并保存用户数据长达一年。 多家科技公司已表态,法案若通过将撤出加拿大市场。 Bill C-22实为此前夭折的Bill C-2法案的改版,前作以“强化边境安全”为名,因严重侵犯公民数字权利遭强烈反弹,未能进入国会委员会审查阶段即告失败,新版虽对部分争议条款微调,但监控核
快科技5月28日消息,近日,莲花集团CEO冯擎峰在接受媒体采访时,回应了外界对莲花"电动化失利"的质疑。 他表示,“不能定义为失败。2018年我们发布Vision80,但推进节奏和预期差距很大。我们原本预判2026年纯电渗透率能到30%,现在连10%都不到。” “欧洲很多国家的燃油车停售时间表都调整了,法拉利、保时捷、阿斯顿马丁也都在重新校准。这不是莲花一家的问题,是超豪华市场的共同困局。” 保时
原文作者:深蓝学院原文链接:https://zhuanlan.zhihu.com/p/2020641171664282025变形物体的机器人操作是机器人学领域的核心挑战,这类物体的动力学特性随形态动态变化且无法提前完全观测,传统方法难以实现跨类别、跨实例的实时适配。李飞飞团队联合德克萨斯大学奥斯汀分校在ICRA2026上提出的 RAPID(Rapid Adaptation of Particle
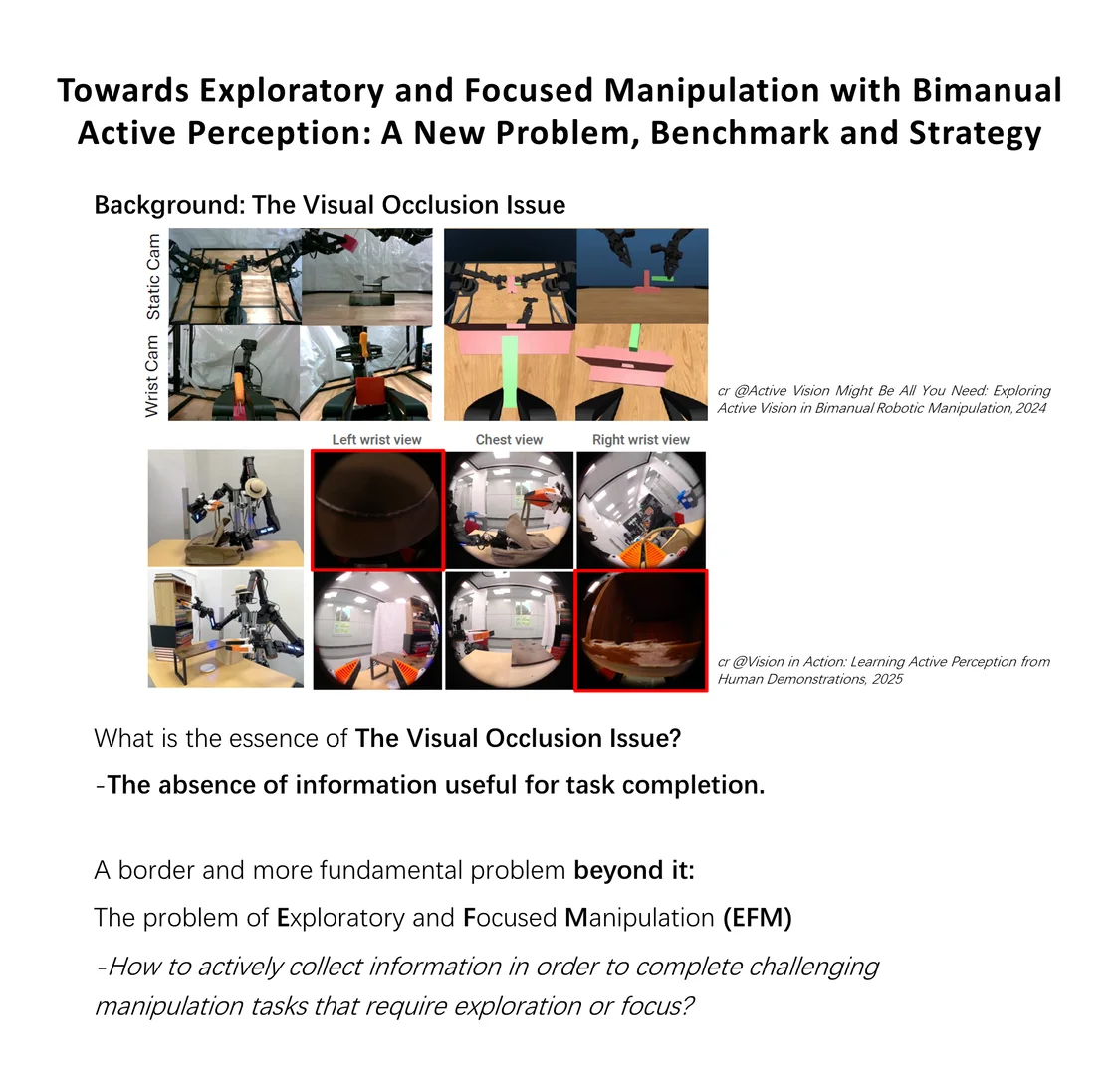
原文作者:RIL-Lab实验室ICRA2026录用论文 (https://arxiv.org/abs/2602.01939)。机器人操作研究的重心正在从桌面协作机械臂操作转向人形双臂操作,这一范式迁移带来的一大挑战是视觉遮挡问题。我们注意到视觉遮挡问题的本质是缺乏支持任务完成的有效信息,并以此为切入点进一步提出了探索性与聚焦性操作(Exploratory and Focused Manipulat
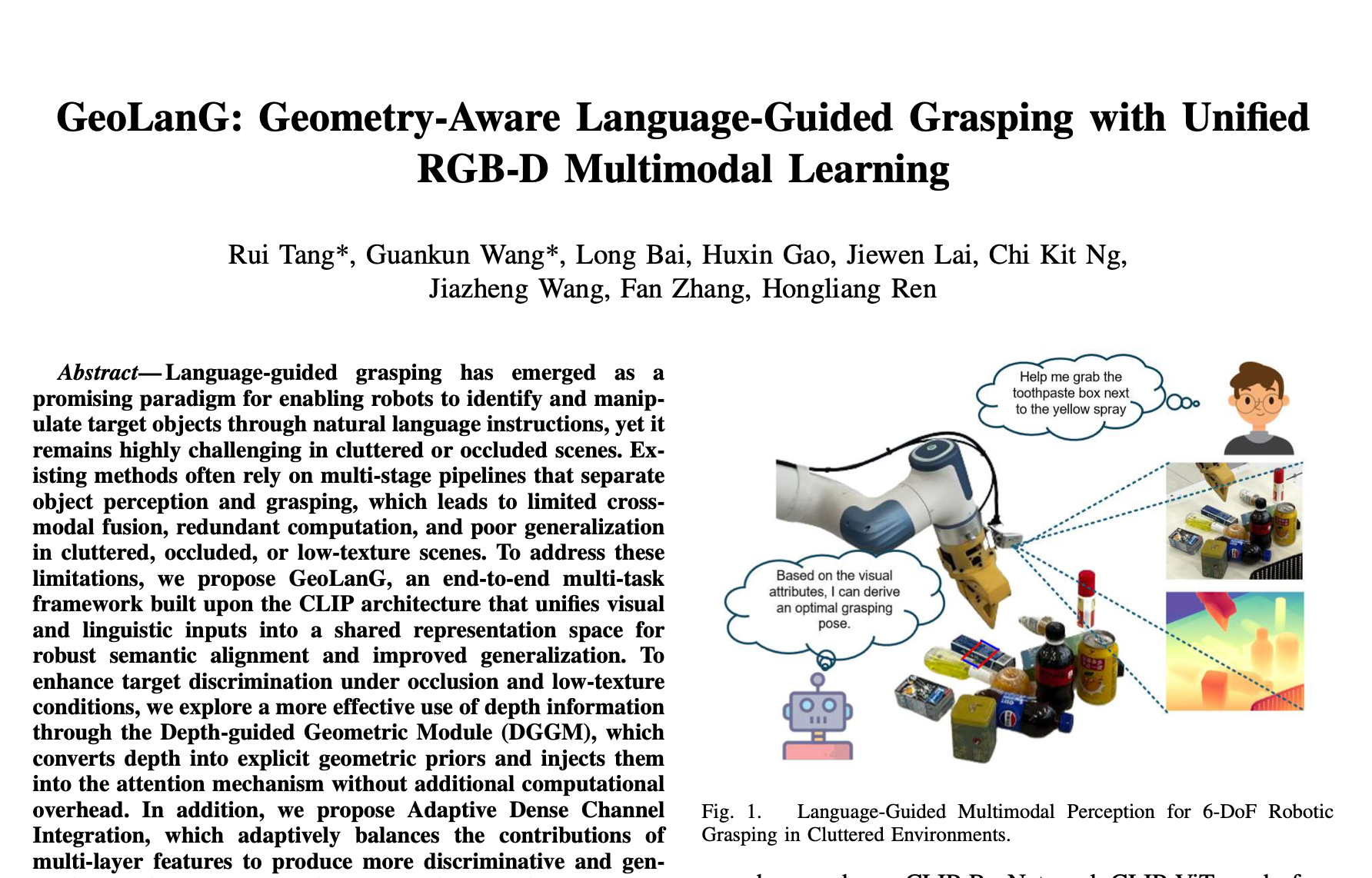
原文链接:http://www.labren.org/mm/news/?-icra-2026-???????-???????/ 很高兴能够分享我们的最新成果——??????。这是一个基于几何认知的统一框架,能够实现语言引导的机器人抓取操作。 语言引导的抓取能力是实现直观的人机交互的关键能力之一。机器人不仅应该能够识别物体,还应该能够理解诸如“拿起碗后面的蓝色杯子”这样的自然语言指令。虽然最近的一些
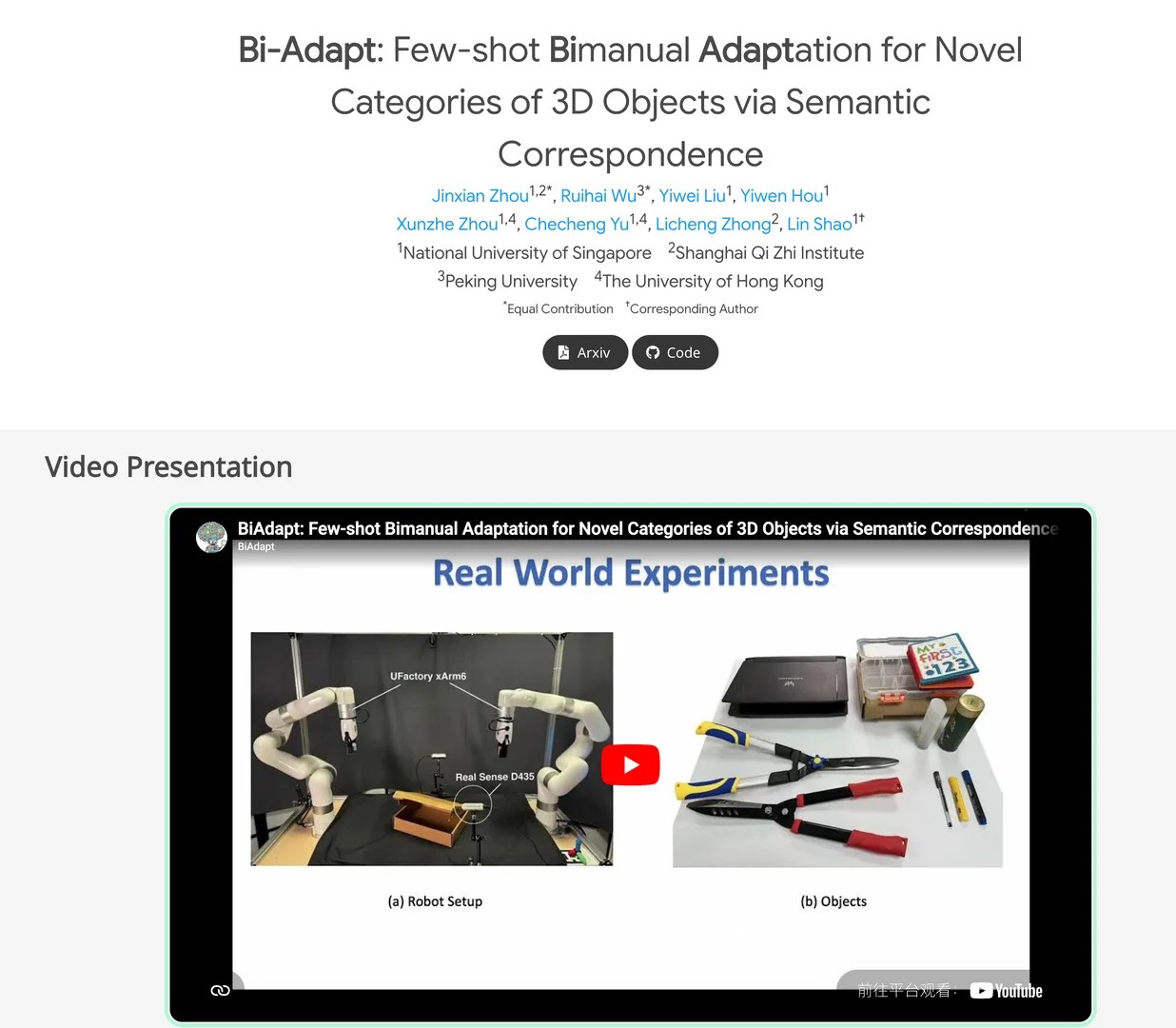
原文作者:新国立具身智能LinS Lab实验室主页:https://linsats.github.io/ Bi-Adapt: Few-Shot Bimanual Adaptation 1工作简介双臂操作(bimanual manipulation)是机器人完成复杂任务的关键能力,但现有方法通常依赖昂贵的数据采集与训练,并且难以泛化到未见类别的物体。 2我们提出了 Bi-Adapt,一个基于视觉基础
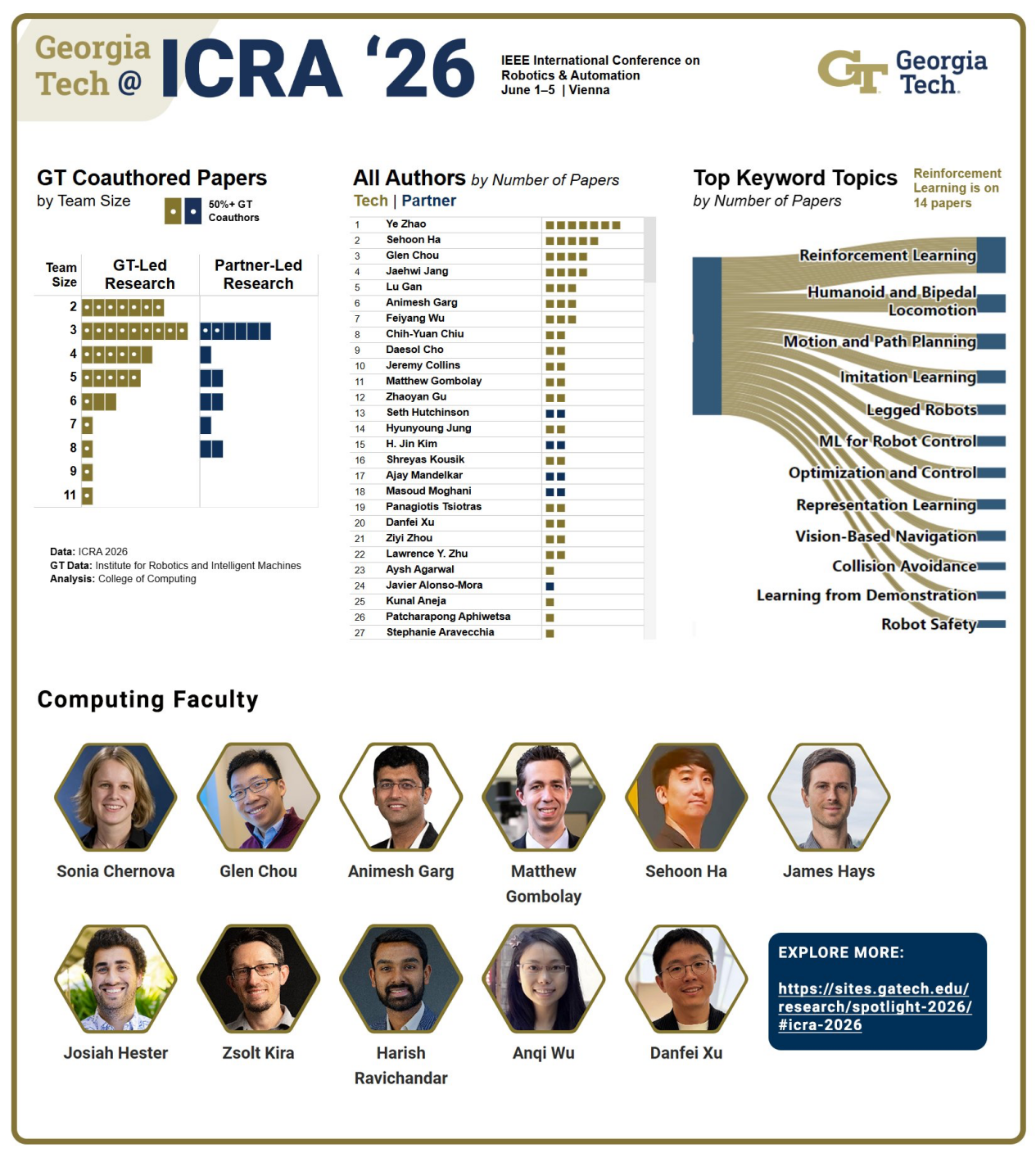
热门议题一 Georgia Tech 90+人/48篇论文为最大规模高校参展确认摘要:本届 ICRA 的学术格局今日正式迎来高潮。佐治亚理工学院(Georgia Tech)官方确认,将派出 90+ 人的庞大代表团并携带 48 篇录用论文奔赴现场,正式成为本届大会参展规模最大、声势最强的高校单位! 这种“天团级”的科研输出,不仅展现了其在机器人与自动化领域的绝对统治力,也让其展位和相关分论坛成为本届
AI报告
电话咨询
在线咨询
 五度妙笔
五度妙笔 API商城
API商城
 数据库
数据库